UNIVERSITY of CALIFORNIA, IRVINE Evaluating the Impacts Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Different Types of AC Power Connectors in North America
The Different Types of AC Power Connectors in North America White Paper 20 Revision 2 by James Spitaels Contents > Executive summary Click on a section to jump to it Introduction 2 A confusing array of AC power plugs and receptacles exist to deliver power to various electronic loads. This Connectors for multiple 2 white paper describes the different types of connect- applications ors used to power computer equipment in North America. An illustration guide is provided at the end of An international standard 2 the paper to help identify the various connectors by North American standard AC 4 appearance and size. connectors Safety issues 5 Conclusion 7 Resources 8 Appendix 9 white papers are now part of the Schneider Electric white paper library produced by Schneider Electric’s Data Center Science Center [email protected] The Different Types of AC Power Connectors in North America Introduction The connection of electronic equipment to the AC power supply is usually accomplished using detachable connectors. The alternative of "hard-wiring" equipment to the building wiring makes service and movement of equipment more costly and less convenient. Therefore, many types of connectors exist. As a result, much confusion is generated as to what the various connection types are, when they are used, and what they should look like. This white paper describes the different types of connectors used for powering computer equipment in North America, including internationally recognized connectors. A guide for identifying the connectors is provided as a reference (see Appendix) to help identify particu- lar connectors by name, appearance, and size. -
IEEE/MTT-S IMS2021 Event 285 Andrew Young International Blvd
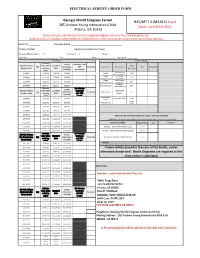
ELECTRICAL SERVICE ORDER FORM Georgia World Congress Center IEEE/MTT-S IMS2021 Event 285 Andrew Young International Blvd. Dates: June 8-10, 2021 Atlanta, GA 30313 Orders may be submitted via email at [email protected] or online at www.gwcca.org Advance rates are available when orders are submitted via online 21 calendars prior to first day of show opening Booth No._________ Company Name _________________________________________ Primary Contact __________________________ Signature to Authorize Charge ___________________________________ Primary Phone No. ( )_________________ Fax No. ( )________________ Email: ____________________________ Address_________________________ City______________________ State_______________ Zip Code _________ ELECTRICAL SPECIAL SERVICES Advance Onsite Overhead add 120 Volt 1 Phase Rate when Standard Rate Qty Rate (Labor 50% Total Cost Item Name Description Qty Total Cost (single outlet) ordering Rate (per unit) included) (as needed) online 1000 watt can 5 AMPS $140.00 $169.40 $228.69 Par 64 $450 light installed in Single 25ft single 10 AMPS $210.60 $254.82 $290.00 $23 Extension Cord receptacle Single 50 ft single 15 AMPS $212.75 $257.42 $331.00 $37 Extension Cord receptacle 4 Outlet 20 AMPS $247.25 $301.17 $382.00 Quad Extension receptacle box $24 Advance 20- 60 amps Onsite 208 Volt 1 Phase Rate when Standard Overhead Receptacle Qty Rate (Labor Total Cost Multi-outlet $15 (single outlet) ordering Rate add 50% adapter included) online to rate Distribution 20 AMPS $276.00 $331.00 $438.00 100A-200A Panel $288 Panel -

Buyer's Guide to Dell Power Distribution Units
Buyer’s Guide to Dell Power Distribution Units With data center devices smaller than ever, often served by dual- or triple-power supplies, a single rack of equipment might produce 80 or more power cords to manage. You want to minimize the number of expensive power drops to each rack, yet power consumption keeps rising—from 600 to 1000 watts per U and growing. Furthermore, power demands can easily double or triple during peak periods and fluctuate with every move, addition, or change. Adding a 1U or 2U server used to mean drawing 300 to 500 more watts from the branch circuit; now, a new blade server can consume ten times as much current. Traditional power strips simply do not deliver enough power, flexibility, or control for today’s realities. You need an effective way to manage the tangle of power cords, deliver the required power without taking up valuable rack space, and have visibility into current draw at any time. Dell™ power distribution units (PDUs) were designed with your needs in mind. These rugged, space-saving devices distribute from 3.6kW to 22kW of power (single-phase or three-phase) to up to 42 sockets/receptacles in a single unit, with or without onboard metering and remote communications. Dell PDUs offer the following key advantages: Right out of the box, Dell PDUs work seamlessly with your Dell servers, storage, and desktop equipment. All models that support network communications integrate with the Dell Management Console powered by Altiris™ from Symantec™ to enable a consolidated infrastructure overview. Vertical models feature true toolless rack mounting. -

Electric Vehicle Charging Stations
September 21, 2017; 1145 EDT INFRASTRUCTURE SYSTEM OVERVIEW: ELECTRIC VEHICLE CHARGING STATIONS Prepared By: Strategic Infrastructure Analysis Division OVERVIEW Electric vehicle (EV) usage continues to increase in the United States, along with its supporting infrastructure. As EVs increase in market share, issues like charging speed and battery capacity will drive future development of EV charging technology. As EV demand increases, manufacturers will continue to develop, build, and deploy additional Internet-connected charging stations and new connected technologies to satisfy demand. These Internet connected technologies include enhanced EV supply equipment (EVSE)-to-EV digital communications (advanced control of the charging process), as well as increasingly networked automobiles and charging systems (expanded communications and control for EVs). This research provides a baseline understanding of EV charging technology, as well as what new technology is on the horizon. Analysts should consider the cyber and physical aspects of this technology as it becomes more prevalent. SCOPE NOTE: This product provides an overview of EV charging stations and associated equipment, which are important components supporting EVs. It summarizes EV historical background, current standards and regulatory environment, current charging methods, technology and equipment, and future and emerging EV technology. This product does not describe threats, vulnerabilities, or consequences of any aspect of the infrastructure system. This product provides analysts, policy makers, and homeland security professionals a baseline understanding of how EV charging systems work. The U.S. Department of Homeland Security (DHS)/Office of Cyber and Infrastructure Analysis (OCIA) coordinated this product with the DHS/National Protection and Programs Directorate (NPPD)/Office of Infrastructure Protection/Sector Outreach and Programs Division, DHS/NPPD/Office of Cybersecurity & Communications/Industrial Control Systems Cyber Emergency Response Team, DHS/Transportation Security Administration, and U.S. -
Electric Vehicle Procurement Best Practices Guide
Preface Funded by the U.S. Department of Energy (U.S. DOE) Clean Cities Program, the Aggregated Alternative Technology Alliance, known as “Fleets for the Future” (F4F), seeks to achieve nationwide economies of scale for alternative fuel vehicles (AFVs) through aggregated procurement initiatives. F4F plans to accomplish these economies of scale through a coordinated strategy designed to increase knowledge, lower the transaction costs of procurement, achieve better pricing, and address potential challenges arising from large-scale procurement initiatives, thereby increasing the deployment of alternative fuel vehicles in public and private sector fleets. The F4F team is comprised of national and regional partners with extended networks and relationships that can increase and aggregate the demand for alternative fuels and advanced vehicles. The project includes a regional procurement initiative spearheaded by each of the team’s five participating regional councils, as well as a national procurement effort. F4F will enable fleets to obtain vehicles that will both reduce emissions and operate at a low total cost of ownership. AFVs that use electricity, propane autogas, and natural gas all have desirable benefits, including less reliance on foreign petroleum, reduced fuel costs, reduced maintenance costs, and contributions to local air quality improvement. In order to achieve these savings, fleet managers must justify the higher upfront cost of investing in AFVs. By harnessing the power of cooperative procurement to reduce transaction costs and to obtain bulk pricing, F4F aims to reduce the upfront cost premium and make an even stronger case for investing in AFVs. F4F does not detail purchase and use of ethanol, renewable diesel, or biodiesel, which are beneficial for many of the same reasons mentioned above. -

Georgia World Congress Center 285 Andrew Young International Blvd
ELECTRICAL SERVICE ORDER FORM Georgia World Congress Center Atlanta Travel and Adventure Show 2021 285 Andrew Young International Blvd. Atlanta, GA 30313 Event Dates: October 14-17, 2021 Orders may be submitted via email at [email protected] or online at www.gwcca.org Advance rates are available when orders are submitted via online 21 calendars prior to first day of show opening Booth No._________ Company Name _________________________________________ Primary Contact __________________________ Signature to Authorize Charge ___________________________________ Primary Phone No. ( )_________________ Fax No. ( )________________ Email: ____________________________ Address_________________________ City______________________ State_______________ Zip Code _________ ELECTRICAL SPECIAL SERVICES Advance Onsite Overhead add 120 Volt 1 Phase Rate when Standard Rate Qty Rate (Labor 50% Total Cost Item Name Description Qty Total Cost (single outlet) ordering Rate (per unit) included) (as needed) online 1000 watt can 5 AMPS $140.00 $169.40 $228.69 Par 64 $450 light installed in Single 25ft single 10 AMPS $210.60 $254.82 $290.00 $23 Extension Cord receptacle Single 50 ft single 15 AMPS $212.75 $257.42 $331.00 $37 Extension Cord receptacle 4 Outlet 20 AMPS $247.25 $301.17 $382.00 Quad Extension receptacle box $24 Advance 20- 60 amps Onsite 208 Volt 1 Phase Rate when Standard Overhead Receptacle Qty Rate (Labor Total Cost Multi-outlet $15 (single outlet) ordering Rate add 50% adapter included) online to rate Distribution 20 AMPS $276.00 $331.00 $438.00 -

The ASCO Switch Inside the Generlink Is Electrically Positioned and Mechanically Held According to Section 700, 701, and 702 of the National Electric Code
1 1. What is the nature from a safety standpoint of the switch in the GenerLink? When it separates from the utility grid is it physically open or is it like a dyad? a. The ASCO switch inside the GenerLink is Electrically Positioned and Mechanically held according to section 700, 701, and 702 of the National Electric Code. This means that the switch is physically open. 2. When the power comes, back on does it still run from the Generator or does it switch back to the Utility Grid? a. When the Power is out from the Utility Lines the GenerLink automatically transfers from the Utility lines to the GenerLink, when the generator is running. When the power comes back on it will not switch back to the utility lines until the generator runs out of gas or is turned off. The GenerLink takes priority when the Generator is running. So if there is power on the utility grid and you turn on your generator the GenerLink will still transfer from the utility line to the Generator. 3. Why does the disk in the meter still turn when the Generator is running? a. The disk in the meter should not be turning. If it is either the customer is using over 30 amps or they do not have the unit installed correctly. 4. Does the GenerLink Surge Suppressor Protect both the line side and the house side? a. The surge only protects the house side it is running from the Generator. 5. What if I have a surge suppressor already in my meter? a. -

Large Scale Charging of Electric Vehicles: Technology and Economy
LARGE SCALE CHARGING OF ELECTRIC VEHICLES: TECHNOLOGY AND ECONOMY A Dissertation Presented to the Faculty of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy by Zhe Yu January 2017 © 2017 Zhe Yu ALL RIGHTS RESERVED LARGE SCALE CHARGING OF ELECTRIC VEHICLES: TECHNOLOGY AND ECONOMY Zhe Yu, Ph.D. Cornell University 2017 The electrification of the transportation sector through the diffusion of plug-in electric vehicles (EVs), coupled with cleaner electricity generation, is consid- ered a promising pathway to reduce air pollution from on-road vehicles and to strengthen energy security. The annual new EV sales increased 8-fold since 2011. However, the market share of EVs is still less than 1% in the new ve- hicle market. One of the significant barriers to large-scale adoption of EVs is the charging facilities. Well developed EV charging services are essential for the successful launch of electric vehicles and provide valuable vehicle-to-grid (V2G) services to the smart grid. On the other hand, unplanned charging brings instability, inefficiency and higher cost to the power grid and hinders the rise of clean transportation. This work focuses on the EV charging, including the methodology, develop- ment, and economy. In different contexts, the technologies of EV charging are presented. Both online and off-line approaches are discussed, in decentralized and centralized scenarios. The interaction between the EVs and the power grid is studied, in particular for the V2G services including load shifting, frequency regulation and spinning reserves. The indirect network effect between EVs and EV charging are illustrated. -

Electrical Connectors
Electrical Connectors Georgia World Congress Center 285 Andrew Young International Blvd. Atlanta, GA 30313 Engineering Dept.:Phone: (404) 223-4800 Fax: (404) 223-4813 A female connector will be provided on the electrical service from GWCC. A male plug will need to be provided by the exhibitor to match the corresponding connector for the desired power supply. If the plug is not pre-installed on the exhibitors equipment a plug will be provided with a labor charge. 120 Volt 1 NEMA connector provided by GWCC Phase 5 AMPS 5-15R 10 AMPS 5-15R 15 AMPS 5-15R 20 AMPS 5-15R 208 Volt 1 NEMA connector provided by GWCC Phase 20 AMPS L14-20R 30 AMPS L21-30R 40 AMPS L21-30R 50 AMPS HBL26516(Non NEMA ) 60 AMPS HBL26516(Non NEMA ) 80 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 100 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 150 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 200 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 208 Volt 3 NEMA connector provided by GWCC Phase 20 AMPS L21-20R 30 AMPS L21-30R 40 AMPS L21-30R 50 AMPS HBL26516(Non NEMA ) 60 AMPS HBL26516(Non NEMA ) 80 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 100 AMPS Cam Locks with ground and neutral reversed (Three Female hot leads, male ground and male neutral) 150 AMPS Cam Locks with ground and neutral -

AC Power Plugs and Sockets 1 AC Power Plugs and Sockets
AC power plugs and sockets 1 AC power plugs and sockets AC power plugs and sockets are devices for removably connecting electrically operated devices to the power supply. A plug connects to a matching socket. Plugs are mostly or completely male, while sockets are mostly or completely female; the plug has protruding prongs or pins that fit into matching slots or holes in the socket. Generally the plug is the movable connector attached to an electrically-operated device's power cord, and the socket is a fixture on equipment or a building structure. Wall-mounted sockets are also called receptacles, outlets, or power points.[1] [2] To reduce the risk of electric shock, plug and socket systems can incorporate a variety of safety features. Sockets can be designed to accept only compatible plugs and reject all others, for example, and some systems are designed such that dangerous voltage is never present on an exposed contact. Exposed contacts are present in some sockets, but are used exclusively for grounding (earthing). Terminology There are differences between British and American nomenclature related to power plugs and sockets, and other regional variations (e.g. Australian) also exist. The terminology can be confusing or even technically incorrect, but nevertheless has been widely used in practice. This table lists current and past usage, and compares regional variations. British English American English Other Terms Meaning mains power line power Primary electrical power supply wires serving a service entrance conductors building, connected -
The Different Types of AC Power Connectors in North America
The Different Types of AC Power Connectors in North America White Paper #20 Executive Summary A confusing array of AC power plugs and receptacles exist to deliver power to various electronic loads. This white paper describes the different types of connectors used to power computer equipment in North America. An illustration guide is provided in the appendix to help identify the various connectors by appearance and size. ©2007 American Power Conversion. All rights reserved. No part of this publication may be used, reproduced, photocopied, transmitted, or 2 stored in any retrieval system of any nature, without the written permission of the copyright owner. www.apc.com Rev 2007-0 Introduction The connection of electronic equipment to the AC power supply is usually accomplished using detachable connectors. The alternative of "hard-wiring" equipment to the building wiring makes service and movement of equipment more costly and less convenient. Therefore, many types of connectors exist. As a result, much confusion is generated as to what the various connection types are, when they are used, and what they should look like. This white paper describes the different types of connectors used for powering computer equipment in North America, including internationally recognized connectors. A guide for identifying the connectors is provided as a reference to help identify particular connectors by name, appearance, and size. Connectors for Multiple Applications Different styles of AC connectors exist in order to address different wiring systems and to ensure user safety. Within the North American NEMA standard alone, approximately 150 different styles of AC connectors are defined. Power distribution and utilization standards dictate that connectors have a specific number of pins. -

Educational Glossary - Power Defi Nitions
Educational Glossary - Power Defi nitions What is an Amp? What is Apparent Power? An Amp (or Ampere) is the standard measure of Apparent Power is the instantaneous calculation of electrical current. Much like water fl owing through a Volts x Amps. pipe, the Amp is a measure of how much electricity is moving through a wire at a given time. The Amp What is Real Power? draw of a circuit is dependent on the needs of the Real Power is the RMS value of Watts. devices plugged into it and is limited by the branch circuit protection. What is Power Factor? Power Factor is the ratio of Real Power to Apparent What is a Volt? Power. Its value ranges from 0 to 1. A value of 1, or A Volt is the standard measure of electrical potential 100 percent, is unity power. Lower values of Power and a fi xed value for every circuit. Voltage is measured Factor indicate that the circuit is wasting energy. Any with respect to a reference point (usually between difference between the RMS value of Watts and the the two respective conductors of the circuit). Voltage Volt-Amps value indicates ineffi ciencies in the way is analogous to pressure in a water pipe. Higher power is being used by the equipment on the circuit. pressures, or higher voltages, allow more energy to = _____________Building Watts fl ow within a given amount of time for a given wire size. What is PUE? IT Watts Standard voltages present in most data centers are PUE stands for power use effectiveness.