Nonlinear Robust Control of an Highly Manoeuvrable Missile
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Asian Military Revolution: from Gunpowder to the Bomb Peter A
Cambridge University Press 978-0-521-60954-8 - The Asian Military Revolution: From Gunpowder to the Bomb Peter A. Lorge Frontmatter More information The Asian Military Revolution Records show that the Chinese invented gunpowder in the 800s. By the 1200s they had unleashed the first weapons of war upon their unsus- pecting neighbors. How did they react? What were the effects of these first wars? This extraordinarily ambitious book traces the history of that invention and its impact on the surrounding Asian world – Korea, Japan, Southeast Asia and South Asia – from the ninth through the twentieth century. As the book makes clear, the spread of war and its technology had devastating consequences on the political and cultural fabric of those early societies although each reacted very differently. The book, which is packed with information about military strategy, interregional warfare, and the development of armaments, also engages with the major debates and challenges traditional thinking on Europe’s contri- bution to military technology in Asia. Articulate and comprehensive, this book will be a welcome addition to the undergraduate classroom and to all those interested in Asian studies and military history. PETER LORGE is Senior Lecturer in the Department of History at Vanderbilt University, Tennessee. His previous publications include War, Politics and Society in Early Modern China (2005) and The International Reader in Military History: China Pre-1600 (2005). © Cambridge University Press www.cambridge.org Cambridge University Press 978-0-521-60954-8 - The Asian Military Revolution: From Gunpowder to the Bomb Peter A. Lorge Frontmatter More information New Approaches to Asian History This dynamic new series will publish books on the milestones in Asian history, those that have come to define particular periods or mark turning-points in the political, cultural and social evolution of the region. -

PEENEMUENDE, NATIONAL SOCIALISM, and the V-2 MISSILE, 1924-1945 Michael
ABSTRACT Title of Dissertation: ENGINEERING CONSENT: PEENEMUENDE, NATIONAL SOCIALISM, AND THE V-2 MISSILE, 1924-1945 Michael Brian Petersen, Doctor of Philosophy, 2005 Dissertation Directed By: Professor Jeffrey Herf Departmen t of History This dissertation is the story of the German scientists and engineers who developed, tested, and produced the V-2 missile, the world’s first liquid -fueled ballistic missile. It examines the social, political, and cultural roots of the prog ram in the Weimar Republic, the professional world of the Peenemünde missile base, and the results of the specialists’ decision to use concentration camp slave labor to produce the missile. Previous studies of this subject have been the domain of either of sensationalistic journalists or the unabashed admirers of the German missile pioneers. Only rarely have historians ventured into this area of inquiry, fruitfully examining the history of the German missile program from the top down while noting its admi nistrative battles and technical development. However, this work has been done at the expense of a detailed examination of the mid and lower -level employees who formed the backbone of the research and production effort. This work addresses that shortcomi ng by investigating the daily lives of these employees and the social, cultural, and political environment in which they existed. It focuses on the key questions of dedication, motivation, and criminality in the Nazi regime by asking “How did Nazi authori ties in charge of the missile program enlist the support of their employees in their effort?” “How did their work translate into political consent for the regime?” “How did these employees come to view slave labor as a viable option for completing their work?” This study is informed by traditions in European intellectual and social history while borrowing from different methods of sociology and anthropology. -

Ming China As a Gunpowder Empire: Military Technology, Politics, and Fiscal Administration, 1350-1620 Weicong Duan Washington University in St
Washington University in St. Louis Washington University Open Scholarship Arts & Sciences Electronic Theses and Dissertations Arts & Sciences Winter 12-15-2018 Ming China As A Gunpowder Empire: Military Technology, Politics, And Fiscal Administration, 1350-1620 Weicong Duan Washington University in St. Louis Follow this and additional works at: https://openscholarship.wustl.edu/art_sci_etds Part of the Asian History Commons, and the Asian Studies Commons Recommended Citation Duan, Weicong, "Ming China As A Gunpowder Empire: Military Technology, Politics, And Fiscal Administration, 1350-1620" (2018). Arts & Sciences Electronic Theses and Dissertations. 1719. https://openscholarship.wustl.edu/art_sci_etds/1719 This Dissertation is brought to you for free and open access by the Arts & Sciences at Washington University Open Scholarship. It has been accepted for inclusion in Arts & Sciences Electronic Theses and Dissertations by an authorized administrator of Washington University Open Scholarship. For more information, please contact [email protected]. WASHINGTON UNIVERSITY IN ST. LOUIS DEPARTMENT OF HISTORY Dissertation Examination Committee: Steven B. Miles, Chair Christine Johnson Peter Kastor Zhao Ma Hayrettin Yücesoy Ming China as a Gunpowder Empire: Military Technology, Politics, and Fiscal Administration, 1350-1620 by Weicong Duan A dissertation presented to The Graduate School of of Washington University in partial fulfillment of the requirements for the degree of Doctor of Philosophy December 2018 St. Louis, Missouri © 2018, -
Army Guide Monthly • Issue #3 (102)
Army G uide monthly # 3 (102) March 2013 Savings Served Up for Bradley Armor Plates Tachanka Hwacha Patria Delivered 1st Batch of NextGen Armoured Wheeled Vehicles to Sweden Micro-robotics Development Furthered with ARL Contract Extension Textron Marine & Land Systems to Build 135 Additional Mobile Strike Force Vehicles Saab Acquires Ballistic Protection Technology Scale Armour Textron Awarded Contract to Produce Turrets and Provide Support for Colombia's APCs US Army Developing New 120mm AMP Tank Round Siege Engine Heavy Tank Medium Tank Tanegashima Super-Heavy Tank www.army-guide.com Army Guide Monthly • #3 (102) • March 2013 Army to change the armor tile box material from titanium to Savings Served Up for Bradley Armor aluminum for more than 800 reactive armor tile sets. Plates "They wanted to change the material for several reasons," said Peter Snedeker, a contracting officer with ACC-New Jersey. "It was easier to manufacture with aluminum rather than titanium, so there would be shorter lead times. Aluminum was also more readily available and cheaper." However, changing a contract isn't a simple matter. The change can't have a material effect on the design, nor can performance be less than what the contract requires. The aluminum must perform just as well or better than titanium to support the demands of the Soldier. When a military contractor approached the Army ACC-New Jersey's technical team performed an with a proposal for significant savings on armor extensive analysis of the change proposal and continued tiles for the Bradley Fighting Vehicle, the impulse to to work with General Dynamics to determine if the quickly go for the savings had to be postponed: The Bradley played such an important role in saving material switch served the form, fit and function lives that keeping a steady flow of contracts was specified in the technical data package. -

Black Powder Free
FREE BLACK POWDER PDF Ally Sherrick | 368 pages | 04 Aug 2016 | Chicken House Ltd | 9781910655269 | English | Somerset, United Kingdom Dixie Gun Works muzzleloading, blackpowder and rare antique gun supplies. Gunpowderalso known as the retronym Black Powder powder to distinguish it from modern smokeless powderis the earliest known chemical explosive. The sulfur and charcoal act as fuels while the saltpeter is an oxidizer. Gunpowder was invented in 9th-century China as one Black Powder the Four Great Inventionsand spread throughout most parts of Eurasia by the end of Black Powder 13th century. Gunpowder is classified as a low explosive because of its relatively slow decomposition rate and consequently low brisance. Low explosives deflagrate i. Ignition of gunpowder packed behind a projectile generates enough pressure to force the shot from the muzzle at high speed, but usually not enough force to rupture the gun barrel. Gunpowder thus makes a good propellant, but is less suitable for shattering rock or fortifications with its low-yield explosive power. However, by transferring enough energy from the Black Powder gunpowder to the mass of the cannonball, and then from the Black Powder to the opposing fortifications by way of the Black Powder ammunition eventually a bombardier may wear down an opponent's Black Powder defenses. Gunpowder was widely used to fill fused artillery shells and used in mining and civil engineering projects until the second half of the 19th century, when the first Black Powder explosives were put into use. The earliest Black Powder formula for gunpowder appeared in the 11th century Song dynasty text, Wujing Zongyao Complete Essentials from the Military Classicswritten by Zeng Gongliang Black Powder and A slow match for flame throwing mechanisms using the siphon principle and for fireworks and rockets is mentioned. -

Castles at War
CASTLES AT WAR Rainer Atzbach, Lars Meldgaard Sass Jensen, and Leif Plith Lauritsen (eds.) Habelt-Verlag • Bonn CASTLES AT WAR Generalforsamling i Foreningen Magt, Borg og Landskab Mandag d. 16. a pril 2012 på Gl. Estrup Herregårdsmuseum Dagsorden 1) Valg af dirigent 2) Formandens beretning, herunder planer for det kommende år 3) Fremlæggelse af foreningens regnskab 4) Fremlæggelse af foreningens budget til orientering 5) Indkomne forslag 6) Fastsættelse af kontingent for medlemmerne 7) Valg af bestyrelsesmedlemmer 8) Valg af revisor og revisorsuppleant 9) Eventuelt CASTLES OF THE NORTH I Edited by The Danish Castle Research Association “Magt, Borg og Landskab” 2015 2015 DR. RUDOLF HABELT GMBH • BONN DR. RUDOLF HABELT GMBH • BONN CASTLES AT WAR Edited by Rainer Atzbach Lars Meldgaard Sass Jensen Leif Plith Lauritsen The Danish Castle Research Association “Magt, Borg og Landskab” Interdisciplinary Symposium 2013 2015 2015 DR. RUDOLF HABELT GMBH • BONN DR. RUDOLF HABELT GMBH • BONN Castles at War Castles of the North I Edited by Rainer Atzbach, Lars Meldgaard Sass Jensen, and Leif Plith Lauritsen The Danish Castle Research Association “Magt, Borg og Landskab” Interdisciplinary Symposium 2013 All rights reserved Assistance by Philip H. W. B. Hansen, Aarhus Layout and prepress by Katrin Atzbach, Aarhus Printed by Druckhaus Köthen, Germany Published by Foreningen “Magt, Borg og Landskab” Cover: The siege of Aubenton (1340 AD) (Source: Jean Froissart, Chroniques de la France (1470–1475), Bibliothèque Nationale de France, Français 2643, fol. 60) ISBN: 978-3-7749-3978-3 Published with financial support of: Queen Margrethe II’s Archaeological Fondation Farumgaard-Fonden Letterstedtska Föreningen School of Culture and Society Research Programme “Materials, Culture and Heritage” Aarhus University © 2015 by Dr. -

Fitting Round Pegs Into Square Holes?
Fitting round pegs into square holes? Did Balduin of Luxemburg, Archbishop of Trier use gunpowder artillery in the siege of Eltz castle 1331/33 ? An analysis by Klaus Leibnitz Abstract:. This paper analyses a theory which attempts to show that a Loshult gun like artillery piece was used in Germany at the siege of Eltz castle in 1331/3. Keywords: Medieval gunpowder , artillery, gun arrows, Loshult cannon, Milemete codices 1.Introduction This paper is intended to stimulate further research into the very interesting topic of early gun arrows. The reason for presenting it is the publication of a series of articles by Wilfried Tittmanni, in which a separate section is devoted to the postulated artillery of Balduin of Luxembourgii , Archbishop of Trier, and which contains some conclusions with which we disagree. It is an undisputed fact that the first illustrations of gunpowder weapons in Europe appeared in the Milemete codicesiii, which can be precisely dated to 1327iv. About their actual size there are many dissenting opinions, but as to their missiles there are none i.e. they are shown to shoot arrows.v After these illustrations there is a gap of about 70 years before new pictures of guns can be foundvi. During this period the more or less ineffective firearm as well as the gunpowder used in them had matured and developed along two completely different lines. On the one hand the gun developed into the small Handbüchse or hand gun and on the other hand in to the large Steinbüchse or bombard. Gunpowder also improved further. From the simple, inefficient roughvii mixed fine-grained so-called meal gunpowder it developed into the wet-mixed Knollenpulver or grained powder and it was soon found by trial and error that a ratio of saltpetre to sulphur to charcoal of 6 : 1 : 2 was the most efficient mixture, a ratio which has remained almost unchanged to this day. -

Early 18Th Century Hand Grenades on the North American Atlantic Coast an Experimental Archaeology Study By
Early 18th Century Hand Grenades on the North American Atlantic Coast An Experimental Archaeology Study by Stephen Lacey April, 2019 Director of Thesis: Donald H. Parkerson, Ph.D. Major Department: History, Program of Maritime Studies ABSTRACT In the first half of the eighteenth century, standardization of weapons appears in cannon, shot, and small arms. No comparative study has been conducted to determine if grenades follow this pattern. In this study, three collections of cast iron grenades dating from 1700–1750 were compared to determine if any statistical significance exists. If so, this will form the basis to create a taxonomy to assist in dating sites. Furthermore, grenade blasts from this era are reported in the historical record but recorders barely understood ballistics. An experimental phase has been designed into the project to fully record a blast via controlled detonation. The concussive force and decibel levels were recorded to help assess potential damage. Upon completion, medical evaluations can be made to determine the full lethality of cast iron grenades. This allows an evaluation of historical records for unexplained deaths, altered behaviors post battle, and critical evaluation of historical documents on grenade lethality. Early 18th Century Hand Grenades on the North American Atlantic Coast An Experimental Archaeology Study A Thesis Presented to the Faculty of the Department of History East Carolina University In Partial Fulfillment of the Requirements for the Degree Master’s of Arts By Stephen Lacey April, 2019 ©Stephen Lacey, 2019 Early 18th Century Hand Grenades on the North American Atlantic Coast An Experimental Archaeology Study By Stephen Lacey APPROVED BY: DIRECTOR OF THESIS: ___________________________________________ Donald H. -

3-1 German Input to the Chapter on Warfare Materials.Pdf
Baltic Marine Environment Protection Commission Expert Group on environmental risks of hazardous SUBMERGED 4-2016 submerged objects Tallinn, Estonia 12-14 April 2016 Document title German input to the Chapter on Warfare materials Code 3-1 Category DEC Agenda Item 3 – Warfare materials Submission date 22.3.2016 Submitted by Germany Reference Background The document includes a first draft of the translation (February 2016) of annex 10.2 of the report “Munitions in German Marine Waters - Stocktaking and Recommendations” (Effective: December, 5th, 2011) Link to the original annex 10.2 in German Language: http://www.schleswig- holstein.de/DE/UXO/TexteKarten/PDF/Berichte/anhang_10200.html Link to the report with annexes in German language: http://www.schleswig- holstein.de/DE/UXO/Themen/Fachinhalte/textekarten_Berichte.html Link to the abstract in English language: http://www.schleswig- holstein.de/DE/UXO/TexteKarten/PDF/blmp_kurzbericht_2011_EN.html - abridged translation (Effective: April 2012) Source: www.underwatermunitions.de Contact: [email protected] Action requested The Meeting is invited to use the material when drafting the chapter on warfare materials. Page 1 of 1 Contribution to HELCOM SUBMERGED 5 – Tallin First draft of the translation (February 2016) of annex 10.2 of the report “Munitions in German Marine Waters - Stocktaking and Recommendations” (Effective: December, 5th, 2011) Link to the original annex 10.2 in German Language: http://www.schleswig- holstein.de/DE/UXO/TexteKarten/PDF/Berichte/anhang_10200.html Link to the report with annexes in German language: http://www.schleswig- holstein.de/DE/UXO/Themen/Fachinhalte/textekarten_Berichte.html Link to the abstract in English language: http://www.schleswig- holstein.de/DE/UXO/TexteKarten/PDF/blmp_kurzbericht_2011_EN.html - abridged translation (Effective: April 2012) Source: www.underwatermunitions.de Contact: [email protected] 10.2.3.4. -

Die Deutschen Flakraketen Im Zweiten Weltkrieg1
Karl-Heinz Ludwig Die deutschen Flakraketen im Zweiten Weltkrieg1 In einem 1967 veröffentlichten Sammelband über den Zweiten Weltkrieg wird darauf hingewiesen, daß schätzungsweise rund hunderttausend »beachtenswerte« geschichtswissenschaftliche Beiträge zu diesem, die politische Situation der ganzen Erde umgestaltenden Ereignis veröffentlicht worden sind2. Vergleichsweise wenig ist über die Rüstung geschrieben worden, d. h. über die technisch-wissenschaftliche Entwicklung von Kriegsgerät, seine tedinisch-wirtsdiaftliche Fertigung und die Modalitäten der späteren Anwendung. Aber nicht nur die Probleme der Rüstung und damit der Wirtschaft im Zweiten Weltkrieg sind unzureichend durchdrungen, noch weniger geklärt ist ihr tatsächlicher Zusammenhang mit denen der Strategie. Bis heute läßt sich nidits Endgültiges darüber aussagen, ob das zunächst so ein- gängige Schema stimmt, wonach zu einer deutschen Blitzkriegsstrategie der ersten Kriegsjahre eine konzipierte Breitenrüstung gehört habe und ab Ende 1941 mit dem sich in die Länge ziehenden Krieg eine Phase der Tiefenrüstung begann8. Die Brauchbarkeit dieses Schemas muß stark angezweifelt werden. Die wechselnden strategischen Zielsetzungen in der Zeit bis 1941 haben naturgemäß nur eine Rüstung der Breite ermöglicht. Eine durchgestaltete Rüstung der Tiefe aber, d. h. geplante Forsdiungs-, Konstruktions- und Entwicklungsarbeiten auf längere Sicht, ein langfristiger Ausbau aller Grundindustrien, eine frühzeitige Abstimmung der Geräteendfertigung beispielsweise mit der Treibstoffversorgung usw., -
Ballistic Missile Operations
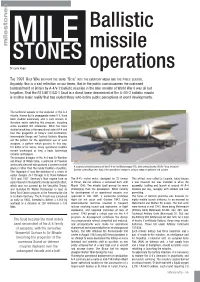
Ballistic milestones MILE STONES missile Dr Carlo Kopp operations THE 1991 GULF WAR BROUGHT THE WORD ‘SCUD’ INTO THE EVERYDAY MEDIA AND THE PUBLIC LEXICON. Arguably, this is a sad reflection on our times, that in the public consciousness the sustained bombardment of Britain by A-4/V-2 ballistic missiles in the later months of World War II was all but forgotten. That the R11/8K11/SS-1 Scud is a direct linear descendent of the A-4/V-2 ballistic missile is another basic reality that has eluded those who define public perceptions of world developments. The technical aspects of the evolution of the A-4 missile, known by its propaganda name V-2, have been studied extensively and a vast amount of literature exists detailing this program, including some excellent W3 references. What has been studied much less is the operational side of A-4 and how this progenitor of today’s Inter-Continental, Intermediate Range and Tactical Ballistic Missiles set the pattern for the operational use of such weapons, a pattern which persists to this day. For better or for worse, many operational realities remain unchanged as long a basic technology remains unchanged. The principal designer of the A-4 was Dr Wernher von Braun of NASA fame, a patrician of Prussian aristocratic descent who pursued a career in rocket physics rather than the family tradition of politics. A recently restored example of the A-4 on the Meillerwagen TEL, both owned by the US Air Force museum. Splinter camouflage was typical for operational weapons, using a range of patterns and colours. -
Codex Martialis: Weapons of the Ancient World
Cod ex Mart ial is Weapo ns o f t he An cie nt Wor ld : Par t 2 Arm or a nd M issile Weapo ns Codex Martialis : Weapons of the A ncient World Par t II : Ar mo r an d Mi ss il e We ap on s 1 188.6.65.233 Cod ex Mart ial is Weapo ns o f t he An cie nt Wor ld : Par t 2 Arm or a nd M issile Weapo ns Codex Martialis: Weapons of the Ancient World Part 2 , Ar mor an d Missile Weapo ns Versi on 1 .6 4 Codex Ma rtia lis Copyr ig ht 2 00 8, 2 0 09 , 20 1 0, 2 01 1, 20 1 2,20 13 J ean He nri Cha nd ler 0Credits Codex Ma rtia lis W eapons of th e An ci ent Wo rld : Jean He nri Chandler Art ists: Jean He nri Cha nd ler , Reyna rd R ochon , Ram on Esteve z Proofr ead ers: Mi chael Cur l Special Thanks to: Fabri ce C og not of De Tail le et d 'Esto c for ad vice , suppor t and sporad ic fa ct-che cki ng Ian P lum b for h osting th e Co de x Martia lis we bsite an d co n tinu in g to prov id e a dvice an d suppo rt wit ho ut which I nev e r w oul d have publish ed anyt hi ng i ndepe nd ent ly.