Observer-Based Time-Variant Spacing Policy for a Platoon of Non-Holonomic Mobile Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Canopy Rainfall Interception Measured Over 10 Years in a Coastal Plain Loblolly Pine
CANOPY RAINFALL INTERCEPTION MEASURED OVER TEN YEARS IN A COASTAL PLAIN LOBLOLLY PINE (PINUS TAEDA L.) PLANTATION M. J. Gavazzi, G. Sun, S. G. McNulty, E. A. Treasure, M. G. Wightman ABSTRACT. The area of planted pine in the southern U.S. is predicted to increase by over 70% by 2060, potentially alter- ing the natural hydrologic cycle and water balance at multiple scales. To better account for potential shifts in water yield, land managers and resource planners must accurately quantify water budgets from the stand to the regional scale. The amount of precipitation as rainfall intercepted by forest canopies is an important component of evapotranspiration in for- ested ecosystems, yet there is little information about intra- and inter-annual canopy interception variability in southern pine plantations. To address this knowledge gap, canopy rainfall interception was measured between 2005 and 2014 in a North Carolina coastal plain loblolly pine (Pinus taeda L.) plantation to quantify the range of annual and seasonal varia- bility in interception rates (IRs) as influenced by stand thinning and natural variation in rainfall rates and intensities. Over the study period, biweekly measured canopy IRs averaged 19% across all years, with a range of 14% to 23%. How- ever, at the annual scale, IRs averaged 12% and ranged from 2% to 17%. Thinning resulted in a 5% decrease in rainfall interception, but IRs quickly returned to pre-thin levels. Across years, the amount of annual rainfall intercepted by the canopy averaged 15% of total evapotranspiration, with a range of 2% to 24%. The decade-long data indicate that inter- annual variability of canopy interception is higher than reported in short-term studies. -

Game Stats - 9/25/20 Scott High at Cumberland Gap
iScore Football Game Stats - 9/25/20 Scott High at Cumberland Gap Game Score 1 2 3 4 T Scott High 7 0 7 21 35 Cumberland Gap 0 0 0 0 0 Scott High Drive Summaries Cumberland Gap Drive Summaries START QTR HEADING POSS. YARDLINE PLAYS YARDS RESULT START QTR HEADING POSS. YARDLINE PLAYS YARDS RESULT 12:00 1 ✒ 01:16 ✒ 43 8 47 Missed Field Goal 10:43 1 ✒ 00:58 ✒ 20 4 -5 Punt 09:44 1 ✒ 00:00 ✒ 44 1 0 Fumble 09:43 1 ✒ 01:12 ✒ 39 4 9 Downs 08:30 1 ✒ 06:15 ✒ 48 7 48 Touchdown 02:14 1 ✒ 01:15 ✒ 27 3 2 Punt 00:58 1 ✒ 02:01 ✒ 37 6 29 Punt 10:56 2 ✒ 03:10 ✒ 20 5 31 Punt 07:45 2 ✒ 01:05 ✒ 13 3 8 Punt 06:39 2 ✒ 00:20 ✒ 47 3 16 Interception 06:18 2 ✒ 04:48 ✒ 18 6 54 Downs 01:29 2 ✒ 01:29 ✒ 28 2 7 End of Quarter 11:04 3 ✒ 03:49 ✒ 33 7 67 Touchdown 11:59 3 ✒ 00:54 ✒ 32 3 1 Punt 05:23 3 ✒ 00:55 ✒ 29 3 37 Interception 07:14 3 ✒ 01:50 ✒ 27 5 9 Punt 00:20 3 ✒ 03:20 ✒ 30 7 30 Touchdown 04:27 3 ✒ 00:29 ✒ 29 3 -3 Punt 08:16 4 ✒ 00:54 ✒ 24 2 24 Touchdown 08:59 4 ✒ 00:42 ✒ 28 2 -2 Fumble 05:25 4 ✒ 02:59 ✒ 39 7 61 Touchdown 07:21 4 ✒ 01:55 ✒ 28 3 2 Punt 02:25 4 ✒ 02:20 ✒ 30 3 4 End of Game Stat Comparison Scott High Cumberland Gap First Downs 20 4 First Downs: Rushing - Passing - Penalty 16-4-0 3-1-0 Rushing Yards 271 46 Passing: Completions - Attempts 8 / 13 3 / 12 Passing Yards 92 43 Passing: Touchdowns - Interceptions 2 / 1 0 / 1 Total Plays 57 40 Total Offense 363 89 Fumbles - Lost 2 / 1 3 / 3 Penalties - Yards 6 / 35 5 / 55 Defensive Sacks - Yards Lost 0 / 0 0 / 0 Time of Possession 27:34 20:26 3rd Down Efficiency 1 of 8 0 of 9 4th Down Efficiency 1 of 2 0 of 1 Punts - Average 4 / 30.75 7 / 32.14 page 1 / 11 iScore Football Game Stats - 9/25/20 Scott High at Cumberland Gap Scoring Plays SCORING TEAM QTR RESULT DESCRIPTION Scott High 1 Touchdown #11 Alex Chambers runs the ball from the > 4 and carries the ball to the endzone. -

Excellence with Equity: It’S Everybody’S Business Findings and Recommendations from the Achievement Gap Study Group
Excellence with Equity: It’s Everybody’s Business Findings and Recommendations from the Achievement Gap Study Group July 2016 Foreword What an honor it has been to work alongside such a dedicated group of educators. Our focus has been on ensuring the highest quality of education for every child in the Commonwealth. We can close the achievement gap if we are willing to consistently implement strategies that are backed by empirical data starting with the removal of stereotypical barriers that inflict adults and affect our children. Frederick Douglass has sagaciously suggested that, “It is easier to build strong children than it is to repair broken adults” (paraphrased). For that reason, this committee has put great emphasis on early childhood education to establish essential building blocks as a solid foundation for the installation of interlocking levels of knowledge critical to assuring that our children can successfully navigate the educational maze that holds the key to their future and ours. If we as policymakers and power brokers are not intentional Dedication about the origination of the solution to the present educational devastation that is devouring us, we will not be successful in steering our children to an intellectual This report is dedicated in destination that will lift the next generation to the heights we collectively aspire. memory of Lynda Thomas. A long-time Prichard This report rebukes the need for further study of what we should do and challenges Committee member all who are strategically positioned to make a difference by doing what we already and leader at Kentucky know. All children achieve more when challenged at high levels. -
Defensive Manual
TEAMWORK SIMPLY STATED, TEAMWORK WINS CHAMPIONSHIPS! Team Philosophy There are only three things that I ask you to believe in unquestionably. If you believe in these three things then you will be a part of this team no matter what your abilities or talents may be or how many mistakes you may make. Likewise, if you do NOT believe in these three things with all your heart and soul, then you will not be a part of this team no matter what your abilities or talents may be or how perfect you may be. You must believe in: 1. YOURSELF. To be successful in anything you must believe (care, trust, confidence) in yourself. If you do not believe in yourself, no one else will. 2. TEAMATE. You must believe in your team mate. We cannot accomplish anything of great value in life without help. Even Jesus had help; he had 12 team mates; it only took one to betray him and the team. If you have a team mate that you do not believe in, then we must build him up 3. COACHES. Finally, you must believe in your leaders, the coaches for we are apart of the team. After Judas betrayed Jesus and the Jews crucified Him, the apostles denied knowing Him and went into hiding. But their faith in Him reunited them and revived their belief in each other which provided them the courage they needed to dedicate and give their lives to His teachings. Thanks to those faithful 11, the teachings of Jesus live today. Nothing of any great significance was ever accomplished alone. -

Chapter 8 - Frequently Used Symbols
UNSIGNALIZED INTERSECTION THEORY BY ROD J. TROUTBECK13 WERNER BRILON14 13 Professor, Head of the School, Civil Engineering, Queensland University of Technology, 2 George Street, Brisbane 4000 Australia. 14 Professor, Institute for Transportation, Faculty of Civil Engineering, Ruhr University, D 44780 Bochum, Germany. Chapter 8 - Frequently used Symbols bi = proportion of volume of movement i of the total volume on the shared lane Cw = coefficient of variation of service times D = total delay of minor street vehicles Dq = average delay of vehicles in the queue at higher positions than the first E(h) = mean headway E(tcc ) = the mean of the critical gap, t f(t) = density function for the distribution of gaps in the major stream g(t) = number of minor stream vehicles which can enter into a major stream gap of size, t L = logarithm m = number of movements on the shared lane n = number of vehicles c = increment, which tends to 0, when Var(tc ) approaches 0 f = increment, which tends to 0, when Var(tf ) approaches 0 q = flow in veh/sec qs = capacity of the shared lane in veh/h qm,i = capacity of movement i, if it operates on a separate lane in veh/h qm = the entry capacity qm = maximum traffic volume departing from the stop line in the minor stream in veh/sec qp = major stream volume in veh/sec t = time tc = critical gap time tf = follow-up times tm = the shift in the curve Var(tc ) = variance of critical gaps Var(tf ) = variance of follow-up-times Var (W) = variance of service times W = average service time. -
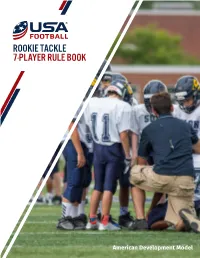
Rookie Tackle 7-Player Rule Book
ROOKIE TACKLE 7-PLAYER RULE BOOK American Development Model ROOKIE TACKLE 7-PLAYER TACKLE RULES Playing Field 1. The playing field is 40 x 35 1/3 yards, allowing for two fields to be created on a traditional 100-yard field at the same time. 2. The sidelines extend between the insides of the numbers on a traditional football field and should be marked with cones every five yards. Use traditional pylons, if available, to mark the goal line and the back line of the end zone. 3. Additional cones can be placed between the five-yard stripes and in line with the inside of the numbers to further outline the playing surface if desired. 4. All possessions start at the 40-yard line going toward the end zone. a. This leaves a 20-yard buffer zone between the two game fields for game administration and safety purposes. Game officials, league personnel, athletic trainers and designated coaches are allowed in this space. b. The offensive huddle may take place in the Administrative Zone. c. Players not in the game stand on the traditional sidelines with one or more coach(es) to supervise. d. The standard players’ box should be used for sideline players. With the field split in two, this keeps players between the 25- and 40-yard line on each respective field and side. 5. First downs, down markers and the chain gang are administered in accordance with National Federation (NFHS) or local rules – starting from the 40-yard line. Coaches and players not in the game stand here ADMINISTRATIVE END ZONE ZONE END ZONE Coaches and players not in the game stand here 2 7-Player Rules Rookie Tackle uses the NFHS rule book as a base and employs the following adjustments for 7-player football. -
America's Skills Gap: Why It's Real, and Why It Matters
MARCH 2019 America’s Skills Gap: Why It’s Real, And Why It Matters BY RYAN CRAIG At the start of 2019, Last fall, following publication of my new book, A New U: Faster + Cheaper Alternatives to College, I 7 million U.S. jobs remained was on a panel at a Boston book fair with another unfilled, and American author, a professor at a nearby university. After I presented a few U.S. Department of Labor employers consistently cite statistics on unfilled jobs in America, she trouble finding qualified responded by saying: “I don’t believe it. I don’t believe your numbers.” Why? Because she hadn’t workers. While some liberals encountered the problem herself. insist a "skills gap" doesn't She’s not alone. In January 2019, lefty blogger and provocateur Matt Yglesias published an exist, all evidence points to 1 article in Vox headlined, “The ‘skills gap’ was a lie.” the contrary. These gaps are He claimed the skills gap “was the consequence moreover made worse by a of high unemployment rather than its cause… With workers plentiful, employers got choosier. higher education system Rather than investing in training workers, they that ill-equips graduates for demanded lots of experience and educational credentials.” the workforce. Those who haven’t ever worked in the private sector might be forgiven for being skeptical about the existence of a skills shortage. But employers know that America has a significant skills gap – one that is growing with each passing month. And you won’t find many skill gap skeptics among underemployed workers, particularly Millennials. -
Stepping Off the Sidelines: the Unrealized Potential of Strategic Ultra-High-Net-Worth Philanthropy
Stepping Off the Sidelines: The Unrealized Potential of Strategic Ultra-High-Net-Worth Philanthropy HILARY MCCONNAUGHEY AND SOKOL SHTYLLA philanthropy.milkeninstitute.org I ABOUT THE MILKEN INSTITUTE The Milken Institute is a nonprofit, nonpartisan think tank. We catalyze practical, scalable solutions to global challenges by connecting human, financial, and educational resources to those who need them. We leverage the expertise and insight gained through research and the convening of top experts, innovators, and influencers from different backgrounds and competing viewpoints to construct programs and policy initiatives. Our goal is to help people build meaningful lives in which they can experience health and well-being, pursue effective education and gainful employment, and access the resources required to create ever-expanding opportunities for themselves and their broader communities. ABOUT THE CENTER FOR STRATEGIC PHILANTHROPY The Milken Institute Center for Strategic Philanthropy (CSP) advises individuals and foundations seeking to develop and implement transformational giving strategies and offers leadership to make the philanthropic landscape more effective. We conduct deep due diligence across a range of issue areas and identify the areas where philanthropic capital can make the biggest impact and create a better world. For more information, please visit philanthropy.milkeninstitute.org. ACKNOWLEDGMENTS The Milken Institute Center for Strategic Philanthropy thanks the dozens of partners and thought leaders who graciously lent their expertise to this report. We particularly appreciate the high-impact philanthropists who shared their personal philanthropic journeys and insights— especially Cindy and Rob Citrone, who encouraged and partnered with CSP to undertake this analysis through their family’s philanthropy, Citrone 33. DISCLAIMER While many organizations are mentioned as examples in this report, the Milken Institute is not advocating or endorsing any of these organizations specifically. -

Football Rules and Interpretations 2018 Edition
INTERNATIONAL FEDERATION OF AMERICAN FOOTBALL FOOTBALL RULES AND INTERPRETATIONS 2018 EDITION 2018.2.2 Foreword The rules are revised each year by IFAF to improve the sport’slev el of safety and quality of play,and to clarify the meaning and intent of rules where needed. The principles that govern all rule changes are that theymust: •besafe for the participants; •beapplicable at all levels of the sport; •becoachable; •beadministrable by the officials; •maintain a balance between offense and defence; •beinteresting to spectators; •not have a prohibitive economic impact; and •retain some affinity with the rules adopted by NCAA in the USA. IFAF statutes require all member federations to play by IFAF rules, except in the following regards: 1. national federations may adapt Rule 1 to meet local needs and circumstances, provided no adaption reduces the safety of the players or other participants; 2. competitions may adjust the rules according to (a) the age group of the participants and (b) the gender of the participants; 3. competition authorities have the right to amend certain specific rules (listed on page 13); 4. national federations may restrict the above sothat the same regulations apply to all competitions under their jurisdiction. These rules apply to all IFAF organised competitions and takeeffect from 1st March 2018. National federations may adopt them earlier for their domestic competitions. Forbrevity,male pronouns are used extensively in this book, but the rules are equally applicable to female and male participants. 2 Table of -

Flag Football, Limited Contact Games Like Tacklebar, Or Padded Flag Football
FOOTBALL A beginner’s guide Congratulations! American football originated in North American colleges in the late 19th century Your kid is thinking as a derivative of British sports rugby and about playing soccer. While it hasn’t been able to get Football. While much of a foothold on a worldwide scale, it continues to be one of the most popular trying a new sport sports in the United States with over 5 can be a bit scary million participants over the age of six. for all involved, we While the idea of your child participating know that once in football may seem overwhelming, you get started, it’s important to understand that youth tackle football is much different than at you and your child the collegiate or professional level. They are going to love it. have more ways to participate, including non-contact versions like flag football, limited contact games like TackleBar, or padded flag football. Each game type has a continued focus on improving fundamentals, having fun, and safety. This guide has all the information you and your child need to get started. DESPITE BEING CALLED A “PIGSKIN,” FOOTBALLS ARE ACTUALLY MADE FROM LEATHER, OR COWHIDE. 1 THE FUNDAMENTALS OF FOOTBALL Before your child steps onto the field, it’s helpful to understand the basics of the game and what to expect. Field of Play Football is almost always played on the field are designated as the end younger players and allows more natural grass or artificial turf fields. zones, which have field goal posts playing time. It also maximizes These fields can range from 120 set on the outside. -

Talent on the Sidelines Excellence Gaps and America’S Persistent Talent Underclass
TALENT ON THE SIDELINES EXCELLENCE GAPS AND AMERICA’S PERSISTENT TALENT UNDERCLASS Jonathan A. Plucker, Ph.D. University of Connecticut Jacob Hardesty, Ph.D. DePauw University Nathan Burroughs, Ph.D. Michigan State University ACKNOWLEDGEMENTS The authors acknowledge the contributions of several colleagues in the preparation of this report, including Kwame Dakwa, Hayley Crabb, Adrienne DiTommaso, Leigh Kupersmith, Rebekah Sinders, and David Rutkowski. Jane Clarenbach, E. Jean Gubbins, and James Kaufman provided helpful peer reviews of various drafts, for which we are grateful. Finally, we appreciate the quick, constructive responses from Saurabh Vishnubhakat and Edward Elliott at the U.S. Patent & Trademark Office when we sent them queries about U.S. PTO’s data capabilities. TABLE OF CONTENTS SECTION I: INTRODUCTION .......................................................................................... 1 RELEVANT RESEARCH SINCE THE FIRST REPORT ................................................. 2 SECTION II: MINIMUM COMPETENCY GAPS VS. EXCELLENCE GAPS ............................ 4 SECTION III: EXCELLENCE IN AMERICAN EDUCATION ................................................ 5 SECTION IV: THE CURRENT STATUS OF EXCELLENCE GAPS ......................................12 DATA SOURCES ...................................................................................................12 RACIAL EXCELLENCE GAPS .................................................................................14 SOCIO-ECONOMIC STATUS ..................................................................................18 -

A Culture of Patient Safety: Crucial Communication by Gayle Thompson Smillie, CRA, RT
RM323_p09-13_ITI.qxd 5/5/10 2:55 PM Page 9 in the industry A Culture of Patient Safety: Crucial Communication By Gayle Thompson Smillie, CRA, RT In 2006, The Joint Commission identified When WHC applied for and was awarded the AHRA and handoff communication as essential to keeping patients safe within the hospital Toshiba America Medical Systems, Inc. Putting Patients First environment.1 Yet ineffective communica- tion is the most frequently cited category grant, the subsequent funding was used to host a conference. of root causes of sentinel events. National Patient Safety Goal (NPSG) 2E requires that a standardized approach to handoff America Medical Systems, Inc. Putting The Meaning of a Culture of Safety communication be implemented, the goal Patients First grant, the subsequent funding The first speaker was Stephen Schenkel, MD, being to increase effectiveness, reduce was used to host a conference in November chief of emergency medicine at Mercy Med- error, and improve patient safety. Washing- 2009 titled, “A Culture of Patient Safety: ical Center in Baltimore, MD and assistant ton Hospital Center (WHC) in Washing- Crucial Communication.” professor of emergency medicine at the Uni- ton, DC has focused a lot of effort on The conference presented three lec- versity of Maryland School of Medicine. Dr. improving handoff communication. Other tures discussing safety related topics: Schenkel spoke about the definition of cul- industries (eg, NASA, the nuclear power • “Culture Eats Strategy for Lunch: ture, which is based on actions, attitudes, industry, and transportation dispatch cen- Uncovering What We Mean By a Cul- beliefs, and traditions. Culture forms the ters) have developed a strategic framework ture of Safety” foundation of any patient safety structure.