Florian Shkurti
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Curriculum Vitae
curriculum vitæ of Dongyan Lin COMPUTATIONAL NEUrOSCIENCE · MACHINE LEArNING · NEUrAL NETWOrKS S dongyanl1n.github.io a [email protected] EDUCATION Sep. 2019 – present Ph.D. in Computational Neuroscience MCGILL UNIVErSITY, CANADA I am a PhD candidate in computational neuroscience at the Integrated Program of Neuroscience at McGill University and Mila. My research lies at the intersection of neuroscience and artificial intelligence. Specifically, I am interested in designing artificial agents whose behaviours and neural representations resemble those observed in animals, as well as developing novel machine learning tools to analyze neural data. cGPA: 4.00/4.00 Sep. 2015 – Jun. 2019 Hon. B.Sc. in Physiology (high distinction) UNIVErSITY OF TOrONTO, CANADA Minored in Mathematics and Psychology. cGPA: 3.87/4.00 RESEArCH EXPErIENCE Sep. 2019 – present Ph.D. Student MILA; MCGILL UNIVErSITY Advisor: Dr. Blake Richards Project: An artificial intelligence framework for the neural basis of time-dependent working memory Sep. 2018 – Apr. 2019 Lab Manager / Research Assistant DEPArTMENT OF PSYCHOLOGY, UNIVErSITY OF TOrONTO Advisor: Dr. Katherine Duncan Project: Investigating the retrieval of semantic memory in human by measuring the familiarity to objects with the naming experiment Jun. 2018 – Aug. 2018 Bioinformatics Intern RIKEN, JAPAN Advisor: Dr. Michiel de Hoon Project: Elucidating the functional roles of anti-sense transcripts in human THP-1 leukemia cells with computational methods May. 2017 – Aug. 2017 Research Student SICKKIDS HOSPITAL; UNIVErSITY OF TOrONTO Advisor: Dr. Steven Prescott Project: In vitro chloride regulation of mouse hippocampal gamma oscillations PrESENTATIONS PrEPrINTS 1. D. Lin, B. A. Richards. Time cell encoding in deep reinforcement learning agents depends on mnemonic demands. -

The Department of Arts, Culture and Media at the University of Toronto
The Department of Arts, Culture and Media at the University of Toronto Scarborough (UTSC) invites applications for a full-time teaching stream position in the area of Critical Digital Methods and Practices. The appointment will be at the rank of Assistant Professor, Teaching Stream with an expected start date of July 1, 2021, or shortly thereafter. Applicants must have earned a PhD degree in Media Studies or a related area by the time of appointment, or shortly thereafter with a demonstrated record of excellence in teaching. The successful candidate must have a breadth of experience teaching digital design, digital methods, and/or emergent techno-cultural practice. Candidates’ practice may be interdisciplinary, and must demonstrate expertise in one or more of the following areas: critical software studies, critical code studies, critical data studies; platform studies; and/or digital media practices among minoritized communities. Priority will be given to candidates who are proficient in and have demonstrated teaching experience in both applied and critical engagements with digital methods, preferably with expertise in data visualization, data retrieval, and other digital tools. Candidates must have teaching expertise in a degree granting program, including lecture preparation and delivery, curriculum development, and development of online material/lectures. Additionally, candidates must possess a demonstrated commitment to excellent pedagogical practices and demonstrated interest in teaching-related scholarly activities. Candidates must -

Orientation Leader Volunteer Role
Orientation Leader Volunteer Role Appointment Type: Volunteer Position • Approximately 30-40 Hours July 1 - September 12, 2021 o 8-10 Hours of Training from July 1 to August 31 o 20-30 Hours throughout Orientation Week from September 6-10 Reports to: Assistant Dean of Students – Student Life Trinity College is a vibrant and diverse academic community with a rich history and excellent local and international reputation. Since its founding in 1851, the College has valued and fostered a high level of academic achievement with some 2,000 currently registered students, 450 of whom live at the College. Trinity College grounds comprise spectacular historic buildings, and the College is among the smallest and most prestigious colleges on the St. George Campus of the University of Toronto. Trinity’s campus currently consists of four main buildings and is located in the central Toronto downtown core, steps from the Bloor-St. George subway and Queen’s Park. Position Summary: Supervised by the Assistant Dean of Students - Student Life and working with staff in the Office of the Dean of Students, and the Orientation Coordinator, Trinity College Orientation Week is the responsibility of the Trinity College Community and successful candidates will help build the student experience and lead incoming students during Trinity College Orientation Week. The Orientation Leaders will receive training over the summer to ensure that they are effectively equipped to support incoming students, and other duties as assigned, including programming and support for -
April 25, 2019 at 12:00 Pm Submitted By: Christopher Hogendoorn, College Secretary [email protected] | 416-978-3614
Corporation Thursday, April 25, 2019 at 12:00 pm Submitted by: Christopher Hogendoorn, College Secretary [email protected] | 416-978-3614 Minutes Chancellor Graham took the Chair and called the Spring Meeting of the Corporation to order. The Secretary read a statement acknowledging the traditional Indigenous territory on which Trinity College operates. 1. Prayer Dean Brittain offered a prayer to open the proceedings. 2. Resolutions The Secretary read the following four resolutions for departed Members of Corporation: Patricia Carr Brückmann Prof. Patricia Carr Brückmann died Wednesday, February 6, 2019 at the age of 86. Born in Boston in 1932, she attended Trinity College in Washington, D.C. as an undergraduate studying English. While visiting Harvard University, she met John Brückmann, whom she married in 1958. Patricia received a Master of Arts degree and a doctorate in English from the University of Toronto, her thesis entitled “Fancy’s Maze: A Study of the Early Poetry of Alexander Pope”. She began teaching English at Trinity College, where her research focused on 18th century literature. Over her years at Trinity she contributed to numerous journals and publications, and in 1996 completed her book A Manner of Correspondence: A Study of the Scriblerus Club. Corporation: Minutes | April 25, 2019 | Page 2 of 8 Patricia was admired and respected by her colleagues at the university and beyond, and was a memorable and beloved professor and friend to generations of Trinity College students, all of whom will miss her dearly. Margaret Evelyn Fleck The Rev. Dr. Margaret Evelyn Fleck died Sunday, January 6, 2019 at the age of 86. -
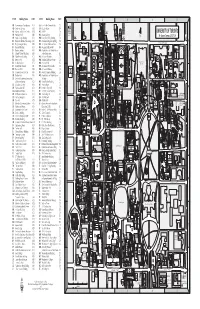
3D Map1103.Pdf
CODE Building Name GRID CODE Building Name GRID 1 2 3 4 5 AB Astronomy and Astrophysics (E5) LM Lash Miller Chemical Labs (D2) AD WR AD Enrolment Services (A2) LW Faculty of Law (B4) Institute of AH Alumni Hall, Muzzo Family (D5) M2 MARS 2 (F4) Child Study JH ST. GEORGE OI SK UNIVERSITY OF TORONTO 45 Walmer ROAD BEDFORD AN Annesley Hall (B4) MA Massey College (C2) Road BAY SPADINA ST. GEORGE N St. George Campus 2017-18 AP Anthropology Building (E2) MB Lassonde Mining Building (F3) ROAD SPADINA Tartu A A BA Bahen Ctr. for Info. Technology (E2) MC Mechanical Engineering Bldg (E3) BLOOR STREET WEST BC Birge-Carnegie Library (B4) ME 39 Queen's Park Cres. East (D4) BLOOR STREET WEST FE WO BF Bancroft Building (D1) MG Margaret Addison Hall (A4) CO MK BI Banting Institute (F4) MK Munk School of Global Affairs - Royal BL Claude T. Bissell Building (B2) at the Observatory (A2) VA Conservatory LI BN Clara Benson Building (C1) ML McLuhan Program (D5) WA of Music CS GO MG BR Brennan Hall (C5) MM Macdonald-Mowat House (D2) SULTAN STREET IR Royal Ontario BS St. Basil’s Church (C5) MO Morrison Hall (C2) SA Museum BT Isabel Bader Theatre (B4 MP McLennan Physical Labs (E2) VA K AN STREET S BW Burwash Hall (B4) MR McMurrich Building (E3) PAR FA IA MA K WW HO WASHINGTON AVENUE GE CA Campus Co-op Day Care (B1) MS Medical Sciences Building (E3) L . T . A T S CB Best Institute (F4) MU Munk School of Global Affairs - W EEN'S EEN'S GC CE Centre of Engineering Innovation at Trinity (C3) CHARLES STREET WEST QU & Entrepreneurship (E2) NB North Borden Building (E1) MUSEUM VP BC BT BW CG Canadiana Gallery (E3) NC New College (D1) S HURON STREET IS ’ B R B CH Convocation Hall (E3) NF Northrop Frye Hall (B4) IN E FH RJ H EJ SU P UB CM Student Commons (F2) NL C. -

BY the NUMBERS 2020 Table of Contents
BY THE NUMBERS 2020 Table of Contents ■ Chapter 1 Undergraduate Studies | 5 ■ Chapter 2 Graduate Studies | 19 ■ Chapter 3 Community | 31 ■ Chapter 4 Research | 53 ■ Chapter 5 Awards & Rankings | 79 ■ Chapter 6 Advancement & Communications | 99 ■ Chapter 7 Financial & Physical Resources | 109 ■ Chapter 8 Data Sources | 115 We wish to acknowledge this land on which the University of Toronto operates. For thousands of years it has been the traditional land of the Huron-Wendat, the Seneca, and most recently, the Mississaugas of the Credit River. Today, this meeting place is still the home to many Indigenous people from across Turtle Island and we are grateful to have the opportunity to work on this land. FACULTY AT A GLANCE Read U of T Engineering’s Impact Report 2020 at uofteng.ca/ annualreport Researchers from the lab of Professor Warren Chan (BME) pose in the lobby of the Terrence Donnelly Centre for Cellular & Biomolecular Research. The team is working on a new approach to rapid, point-of-care testing for COVID-19, just one example of the many ways U of T Engineering researchers have leveraged their expertise in the fight against the pandemic. PHOTO: ALEXANDROS SKLAVOUNOS Comparison of U of T Engineering with Ontario and Canada, 2018–2019 U of T U of T U of T % of % of Engineering Ontario Ontario Canada Canada Undergraduate Enrolment (FTE) 5,273 36,732 14.4% 88,278 6.0% % Women 34.4% 23.8% 21.9% Degrees Awarded 1,057 7,648 13.8% 16,725 6.3% % Women 27.5% 20.6% 21.0% Master's (MEng, MASc and MHSc) Enrolment (FTE) 1,296 7,624 17.0% 17,450 7.4% Degrees Awarded 751 3,796 19.8% 7,768 9.7% % Women 27.2% 24.6% 25.2% Doctoral (PhD) Enrolment (FTE) 849 3,676 23.1% 9,653 8.8% Degrees Awarded 143 583 24.5% 1,576 9.1% % Women 33.6% 25.0% 24.9% Faculty Tenured and Tenure-Stream 237 1,635 14.5% 3,798 6.2% % Women 20.3% 17.7% 15.9% Major Awards Major Awards Received 10 29 34.5% 61 16.4% Research Funding NSERC Funding for Engineering $35.4M $156.6M 22.6% $378.8M 9.4% Footnote: Enrolment and degrees awarded are based on the 2018 calendar year. -

Universities and Programs in Ontario by University
Universities and Programs in Ontario By University UNIVERSITY PROGRAM DEGREE DISCIPLINE/TYPE Brock University Accountancy MAcc Mathematics and Statistics Brock University International Master of IMAcc Mathematics and Statistics Accountancy Brock University Applied Disability Studies MA/MADS/GDip (Type 4) Psychology Brock University Applied Health Sciences MA/MSc/PhD Physical Education, Kinesiology, Recreation Brock University Applied Linguistics MA Linguistics and Translation Brock University Biological Sciences MSc Biology, Botany, Zoology Brock University Biology PhD Biology, Botany, Zoology Brock University Biotechnology MSc/PhD Medical, Biomedical Sciences Brock University Business Administration MBA Administration, Business Management, Engineering Management Brock University Business Economics MBE Economics Brock University Chemistry MSc/PhD Chemistry Brock University Child and Youth Studies MA Psychology Brock University Classics MA Classics Brock University Computer Science MSc Computer, Information, System Science UNIVERSITY PROGRAM DEGREE DISCIPLINE/TYPE Brock University Critical Sociology MA Sociology Brock University Earth Sciences MSc Geology, Geophysics, Geological Engineering Brock University Education MEd Education Brock University English MA English Brock University Geography MA Geography Brock University History MA History, History and Philosophy of Science and Technology Brock University Interdisciplinary Humanities PhD Interdisciplinary Studies Brock University Management MSc Administration, Business Management, Engineering -

Facts & Figures
1 FandF_2011.pdf 1 2/2/2012 3:20:47 PM C Facts & M Y CM Figures MY CY CMY K 2017 Facts and Figures is prepared annually by the Office of Planning & Budget. Facts and Figures provides answers to some of the most frequently asked questions about the University. It is designed and organized to serve as a useful and reliable source of reference information from year to year. The reader of Facts and Figures should take care when attempting to use the enclosed information comparatively. While some definitions are common to other universities, many others are not. Our office maintains some comparative databases and has access to others. Please contact us for assistance when using Facts and Figures comparatively. Each year we try to improve Facts and Figures to make it as useful as possible. We are always grateful for suggestions for improvement. Facts and Figures, and other official publications of the University can also be accessed on the internet at https://www.utoronto.ca/about-u-of-t/reports-and-accountability . Facts & Figures 2017 Project Manager: Xuelun Liang Xuelun can be reached via e-mail at: [email protected] Contributors include: Brian Armstrong, Lucas Barber, Michelle Broderick, Douglas Carson, Helen Chang, Helen Choy, Maya Collum, Jeniffer Francisco, Phil Harper, Mark Leighton, Shuping Liu, Derek Lund, Klara Maidenberg, Len McKee, Zoran Piljevic, Jennifer Radley, José Sigouin, Russell Smith, Skandha Sunderasen, and Donna Wall. Office of Planning and Budget Room 240, Simcoe Hall 27 King's College Circle Toronto, Ontario M5S 1A1 CONTENTS Part A General 3 1. -

James Morone
James Evans Morone Ronald O. Perelman Center for Political Science and Economics University of Pennsylvania 133 S. 36th Street, Philadelphia, PA, 19104 [email protected] ______________________________________________________________________________ Academic Employment Haverford College (Spring, 2020) Visiting Assistant Professor, Political Science Department Bryn Mawr College (Spring, 2019) Adjunct instructor, Introduction to American Politics University of Pennsylvania (Fall, 2017) Adjunct Instructor, American Political Thought Education University of Pennsylvania Ph.D., Political Science (2019, Expected) Dissertation: Institutions, Social Networks, and the Production of Neighborhood-Level Economic Justice Activism Dissertation Committee: Adolph Reed (Chair); Anne Norton; Rogers Smith University of California at Berkeley Summer Fellow, Center on Democracy and Organizing (2019) University of Toronto M.A., Political Science (2010) Brown University B.A., Political Science (2006) Visiting Student, London School of Economics (2004-5) Grants and Awards Institute for Urban Research, University of Pennsylvania (2019) Emerging Scholar Award Center for the Study of Ethnicity, Race, and Immigration, University of Pennsylvania (2019) Graduate Research Fellowship Graduate School of Arts and Sciences, University of Pennsylvania (2017-18) Dissertation Research Fellowship Political Science Department, University of Pennsylvania (2017) Summer Research Fellowship Graduate School of Arts and Sciences, University of Pennsylvania (2013-17) Ben Franklin -

Facts & Figures 2015
Facts and Figures is prepared annually by the Office of the Assistant Vice-President, Government, Institutional and Community Relations. Facts and Figures provides answers to some of the most frequently asked questions about the University. It is designed and organized to serve as a useful and reliable source of reference information from year to year. The reader of Facts and Figures should take care when attempting to use the enclosed information comparatively. While some definitions are common to other universities, many others are not. Our office maintains some comparative databases and has access to others. Please contact us for assistance when using Facts and Figures comparatively. Each year we try to improve Facts and Figures to make it as useful as possible. We are always grateful for suggestions for improvement. Facts and Figures can also be accessed on the Internet at http://www.utoronto.ca/about-uoft/measuring-our-performance/facts-figures Other official publications of the University can be found on the About U of T website: http://www.utoronto.ca/about-uoft/measuring-our-performance Facts & Figures 2015 Project Manager: Xuelun Liang Xuelun can be reached via e-mail at: [email protected] Contributors include: Brian Armstrong, Michelle Broderick, Douglas Carson, Helen Choy, Alison Colpitts, Maya Collum, Jeniffer Francisco, Phil Harper, Richard Kellar, Mark Leighton, Shuping Liu, Derek Lund, Maureen Lynham, Klara Maidenberg, Jennifer Radley, José Sigouin, Susan Senese, Russell Smith, Jeffrey Waldman, and Donna Wall. Government, Institutional and Community Relations Room 5, Simcoe Hall 27 King's College Circle Toronto, Ontario M5S 1A1 http://www.universityrelations.utoronto.ca/gicr CONTENTS Part A General 3 1. -

Phd Placement History
Department of Economics Office of Graduate Student Affairs 1126 East 59th Street, SHFE 511 Chicago, IL 60637 Telephone: 773.834.1972 Fax: 773.702.8490 _____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ ___________________________________________________ PhD Job Placement History 2015 - 2016 Academic – Tenure Track Australian National University Columbia University University of Connecticut Duke University University of Florida (2) Harvard Business School Massachusetts Institute of Technology University of Nebraska New York University - Stern Northwestern University Peking University Sharif University Public Sector International Monetary Fund (2) Public Sector Compass Lexecon Intensity Consulting 2014 - 2015 Academic – Tenure Track Cornell University Hong Kong Polytech University Michigan State University Purdue University Stanford University University of British Columbia University of California, Los Angeles University of Minnesota – Business University of Zurich Washington University Academic – Non-Tenure Track Harvard University New York University, Furman Center University of Chicago, Harris School of Public Policy University of Indiana, Ft. Wayne Public Sector Board of Governors, Federal Reserve Bank International -

Ryerson University Magazine Summer 2021
No. 2 How to help each other in uncertain times No. 12 Our creativity has no limits FOR ALUMNI AND FRIENDS No. 9 Our senior No. 16 citizens deserve We can use our better care time in lockdown to grow No. 10 No. 17 We need better How to start a ways to support business in frontline workers a pandemic No. 5 We are stronger than we think No. 1 We need a liveable city for No. 6 everyone Privacy and security matter even more 17 key takeaways from a year of new normals, endless pivots and calls to build a better world SUMMER 2021 Create the change you want to see in the world. Realize your future at ryerson.ca/graduate/ future-students Dr. Loree Erickson, Disability Studies postdoctoral alumna, artist and activist. Contents SUMMER 2021 Sara Yacobi-Harris founded No Silence on Race to create inclusive spaces. Gould Street Alumni Diary 3 President’s message 29 Making a difference Tri-Mentoring advocate 5 Hybrid learning Sonny Thaker on flourishes giving back In-person labs and virtual hospital help 30 Listen to this nursing and midwifery T wo gifted storytellers students master skills share your next 21S ’TRE AGAM, IYLLIEE NNNYY WH BPARGOTOH; PELAY DY TS BNOITARTSULLR IEVOC BNOITARTSULLR TS DY PELAY BPARGOTOH; WH NNNYY IYLLIEE AGAM, ’TRE 21S favourite podcast 6 A ward-winning building Features A look inside the 32 Life story Daphne Cockwell Health 12 H ow Sara Asalya Sciences Complex 17 things we’ve learned creates community The last year has shed light on challenges for newcomers 7 Med school ahead? we cannot ignore.