Download Assembly PDF (Pro Version)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Introduction Mainframes
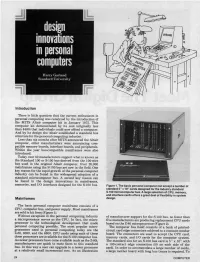
LL I I I I Introduction . 11.. V ZI i ..O. There is little question that the current enthusiasm in personal computing was catalyzed by the introduction of the MITS Altair computer kit in January 1975. This computer kit demonstrated by its cost (originally less than $400) that individuals could now afford a computer. And by its design the Altair established a standard bus structure for the personal computing industry. Less than six months after MITS announced the Altair computer, other manufacturers were announcing com- patible memory boards, interface boards, and peripherals. Within the year bus-compatible mainframes were also introduced. Today over 50 manufacturers support what is known as the Standard 100 or S-100 bus derived from the 100-wire bus used in the original Altair computer. Over 20,000 mainframes using the S-100 bus are now in the field. One key reason for the rapid growth of the personal computer industry can be found in the widespread adoption of a standard microcomputer bus. A second key reason can be found in the design innovations in mainframes, memories, and I/O interfaces designed for the S-100 bus. Figure 1. The basic personal computer can accept a number of standard 5" x 10" cards designed for the industry standard S-100 microcomputer bus. A large selection of CPU, memory, and interface cards offers a great deal of flexibility in system Mainframes design. The basic personal computer mainframe consists of a CPU, computer bus, and power supply. Most mainframes are sold in kit form (Figure 1). Without exception in the personal computing industry of manufacturer support for the S-100 bus, no fewer than a microprocessor serves as the CPU. -

Why I Hate Microsoft by F.W
Why I hate Microsoft by F.W. van Wensveen Why I hate Microsoft "A personal, lengthy, but highly articulate outburst" by F.W. van Wensveen Table of contents Introduction A brief introduction, or why this paper needed to be written Abstract The management summary 1. From the people who brought you EDLIN Microsoft and innovation 2. The not-so-good, the bad and the ugly The general quality of Microsoft products 3. The power to bind Formats and standards 4. World domination From business to megalomania 5. Bad practice, foul play Exploring the limits of lawful conduct 6. Caveat Emptor Think before you buy 7. Where are you forced to go today? Price gouging and other monopolist practices 8. The road ahead On diminishing returns and continuing trends Appendix A A brief overview of Windows' most serious design flaws Appendix B Links Introduction "One OS to bring them all and in the darkness bind them..." From the title of this paper you may have guessed that I am not very impressed with the guys in Redmond. One might even say that my dislike for Microsoft is a pet hate gone out of control in an almost quixotic fashion. Why is this? Of course I have been accused of personal antipathy, of being jealous of Bill Gates and his billions, and of being prejudiced against all things Microsoft without any reason whatsoever. None of this is true. I have nothing personal against Bill Gates. Why should I? I don't know the man, I've never met him. I agree with those who say he might be the most successful salesman in history. -

Bill Gates – a Story of Success
Bill Gates – A story of Success William H. Gates is chairperson and chief software architect of Microsoft Corporation, the worldwide leader in software services and Internet technologies for personal and business computing. Bill Gates was born on October 28, 1955 in a family having rich business, political and community service background. His great-grandfather was a state legislator and a mayor, his grandfather was vice president of national bank and his father was a lawyer. Bill strongly believes in hard work. He believes that if you are intelligent and know how to apply your intelligence, you can achieve anything. From childhood Bill was ambitious, intelligent and competitive. These qualities helped him to attain top position in the profession he chose. In school, he had an excellent record in mathematics and science. Still he was getting very bored in school and his parents knew it, so they always tried to feed him with more information to keep him busy. Bill’s parents came to know their son's intelligence and decided to enroll him in a private school, known for its intense academic environment. It was a very important decision in Bill Gate's life where he was first introduced to a computer. Bill Gates and his friends were very much interested in computer and formed "Programmers Group" in late 1968. Being in this group, they found a new way to apply their computer skill in university of Washington. In the next year, they got their first opportunity in Information Sciences Inc. in which they were selected as programmers. ISI (Information Sciences Inc.) agreed to give them royalties whenever it made money from any of the group’s program. -
Personal Computing
Personal Computing Thomas J. Bergin ©Computer History Museum American University Recap: Context • By 1977, there was a fairly robust but fragmented hobbyist-oriented microcomputer industry: – Micro Instrumentation Telemetry Systems (MITS) – Processor Technology – Cromemco – MicroStuf – Kentucky Fried Computers • Two things were needed for the personal computer revolution: 1) a way to store and retrieve data, and 2) a programming language in which to write applications. Homebrew Computer Club • March 5, 1975: the Amateur Computer Users Group (Lee Felsenstein, Bob Marsh, Steve Dompier, BobAlbrecht and 27 others) met in Gordon French’s garage, Menlo Park, CA • 3rd meeting drew several hundred people and was moved to the Coleman mansion • Stanford Linear Accelerator Center’s auditorium – Steve Wozniak shows off his single board computer – Steve Jobs attends meetings Homebrew-ed • 21 companies formed: – Apcose Apple – Cromemco Morrow – North Star Osborne • West Coast Computer Faire • Byte magazine, September 1975 • Byte Shop Both: images.google.com And then there was Traf-O-Data • October 28, 1955: William H. Gates III born – father: attorney mother: schoolteacher • Lakeside School: Lakeside Programming Group – Mothers Club: access to time-shared system at GE – Students hired by local firm to debug software – First computer program: Tic-Tac-Toe (age 13) – Traf-O-Data to sell traffic mgt. software (age 16) • 1973, Bill Gates enrolls at Harvard in pre-law. • Paul Allen is in his second year. January 1975, Popular Electronics: Altair • Allen shows -

Bill Gates, "Keynote Address to the Creating Digital Dividends Conference" (18 October 2000)
Voices of Democracy 2 (2007): 227‐243 French 227 BILL GATES, "KEYNOTE ADDRESS TO THE CREATING DIGITAL DIVIDENDS CONFERENCE" (18 OCTOBER 2000) Sandra L. French Radford University Abstract: In the first twenty‐five years of Microsoft, Bill Gates established himself and his company as a powerful social force in the advancement of technology. Gates' keynote address to the 2000 Creating Digital Dividends conference, however, surprised attendees and the press by arguing against the establishment of technology in underdeveloped nations in favor of promotion world equity in healthcare. This speech presents a major shift in Gates' persona, and was largely derided as insincere philanthropy. Key Words: digital divide, technology, Bill Gates, health, crisis, computers. The influence of Bill Gates on technology, society, and global economics is undisputed. He co‐founded Microsoft in 1975 with the vision of a "computer on every desk and in every home"—a computer that would, of course, be running Microsoft software. In the first twenty‐five years of Microsoft, their software products have become the primary method for working, obtaining information, and communicating online. Gates' tenure as Microsoft's chief executive has come to symbolize for many the dawn of the information age and the resultant digital capitalism. Images of Gates are filtered to the public through the mass media and the increasing technological literacy of the global world. Technology is a popular subject of study for contemporary rhetoricians, and has been examined at the micro and macro levels. While much has been written about the development of the personal computer and its impact on society, little attention has been given to technology's business leaders. -
The Impact of Software As a Service in Software Piracy”
Universidade Católica Portuguesa Católica Lisbon School of Business and Economics “The impact of Software as a Service in Software Piracy” Has the change in the distribution and sale of software provided not only an accurate answer against software piracy but also an increase in consumer-value? Advisor: Professor Nicoletta Corrocher Discussant: Professor Lars Jeppesen Dissertation submitted in partial fulfillment of requirements for the degree of MSc in Business Administration, at the Universidade Católica Portuguesa, December, 2012. Master of Science Thesis of: João, Fonseca George 1609221 2012-2013 Table of Contents Abstract and Literature Review ....................................................................... 1 Section 1: Introduction .................................................................................... 2 What is Software? ....................................................................................... 5 How will we distinguish between the different software programs? ............. 5 What types of software are there according to function? ............................ 5 What types of software are there according to accessibility? ...................... 7 What is Innovation? ..................................................................................... 8 Section 2: The Evolution of the Software Industry ........................................ 9 Software Contracting and the Origins of the Industry ................................ 10 Development of the Software Industry: The Personal Computer as a platform -

E Bill Gates
E Bill Gates Bill Gates nacque il 28 Ottobre del 1955 a Seattle. Nel 1968, l'anno in cui si iscrisse alla prestigiosa scuola privata Lakeside , Gates e i suoi compagni ebbero accesso per la prima volta ad un computer , un DEC PDP- 11 di proprietà della Computer Center Corporation Alla fine del 1968, Gates, Allen ed altri due hacker del gruppo (Ric Weiland e Kent Evans), fondarono la Lakeside Programmers Group. Una società li assunse per trovare le debolezze del loro sistema, ed in cambio diede loro tempo illimitato al computer. Nel marzo del 1970 la società chiuse e la Lakeside Programmers Group dovette cercare altri modi per ottenere accesso ad un computer. Trovarono la Information Science Inc ., che li accettò per la creazione di un programma di gestione paghe, promettendo in cambio, oltre all'accesso al computer, anche una royalty se dai programmi del gruppo si fossero avuti dei guadagni. In quel periodo accade che gli altri tre del gruppo chiesero a Gates di lasciare il gruppo, perché il lavoro non sembrava sufficiente per tutti, ma Gates li convinse a tenerlo con loro. Successivamente, nel 1972, Bill e Paul fondarono la Traf-O-Data, che progettò un computer per misurare il traffico stradale La Traf-O-Data durò fino alla fine degli studi di Bill. I due lavorarono insieme anche per informatizzare il sistema di gestione della scuola . Negli ultimi anni di scuola, ebbero l'invito dalla TRW, non solo di trovare le debolezze del loro sistema ma anche di programmare i rimedi.Nel 1973, Gary Kildall scrisse un semplice sistema operativo nel suo linguaggio PL/M, il CP/M (Control Program/Monitor), e lasciò i sorgenti accessibili a tutti per scopi didattici. -

The Discursive Coding of Software: a Study of the Relationship Between Stability and Change Jennifer Helene Maher Iowa State University
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Digital Repository @ Iowa State University Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 2006 The discursive coding of software: a study of the relationship between stability and change Jennifer Helene Maher Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Discourse and Text Linguistics Commons, Other Communication Commons, Programming Languages and Compilers Commons, and the Rhetoric and Composition Commons Recommended Citation Maher, Jennifer Helene, "The discursive coding of software: a study of the relationship between stability and change" (2006). Retrospective Theses and Dissertations. 13941. https://lib.dr.iastate.edu/rtd/13941 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. The discursive coding of software: A study of the relationship between stability and change by Jennifer Helene Maher A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Rhetoric and Professional Communication Program of Study Committee: David Russell, Major Professor Carl Herndl Dorothy Winsor Diane Price Herndl David Schweingruber Iowa State University Ames, Iowa 2006 Copyright © Jennifer Helene Maher, 2006. All rights reserved UMI Number: 3243534 UMI Microform 3243534 Copyright 2007 by ProQuest Information and Learning Company. -

Harvard Journal of Law & Technology Volume 31, Special Issue Spring 2018
Harvard Journal ofLaw & Technology Volume 31, Special Issue Spring 2018 RISE OF THE API COPYRIGHT DEAD?: AN UPDATED EPITAPH FOR COPYRIGHT PROTECTION OF NETWORK AND FUNCTIONAL FEATURES OF COMPUTER SOFTWARE Peter S. Menell* TABLE OF CONTENTS I. INTRODUCTION .............................................................................. 3 07 11. COPYRIGHT PROTECTION FOR COMPUTER SOFTWARE 1. 0 ........... 313 A. A PersonalAccount .................................................................. 313 B. Setting the Stage ....................................................................... 314 1. The Intellectual Property Backdrop: Legislation and Legislative History .......................................................... 315 2. Network Economics .............................................................. 318 3. The Industrial Backdrop ........................................................ 319 C. The AP! Copyright War ........................................................... 321 1. Jurispmdence ......................................................................... 322 i. The Early Years .................................................................. 323 ii. The Modern Software Copyright Era ................................ 326 2. Legislative Developments ..................................................... 341 D. The End of the First AP! Copyright War and the Logic of the Intellectual Property System ........................................ 342 III. COPYRIGHT PROTECTION FOR COMPUTER SOFTWARE 2. 0: THE ORACLE WAVE ...................................................................... -
Rise of the API Copyright Dead: an Updated Epitaph for Copyright Protection of Network and Functional Features of Computer Software Peter S
Berkeley Law Berkeley Law Scholarship Repository Faculty Scholarship Spring 3-1-2018 Rise of the API Copyright Dead: An Updated Epitaph for Copyright Protection of Network and Functional Features of Computer Software Peter S. Menell Berkeley Law Follow this and additional works at: https://scholarship.law.berkeley.edu/facpubs Part of the Law Commons Recommended Citation Rise of the API Copyright Dead: An Updated Epitaph for Copyright Protection of Network and Functional Features of Computer Software, 31 Harv. J. L. & Tech. 305 (2018) This Article is brought to you for free and open access by Berkeley Law Scholarship Repository. It has been accepted for inclusion in Faculty Scholarship by an authorized administrator of Berkeley Law Scholarship Repository. For more information, please contact [email protected]. Harvard Journal ofLaw & Technology Volume 31, Special Issue Spring 2018 RISE OF THE API COPYRIGHT DEAD?: AN UPDATED EPITAPH FOR COPYRIGHT PROTECTION OF NETWORK AND FUNCTIONAL FEATURES OF COMPUTER SOFTWARE Peter S. Menell* TABLE OF CONTENTS I. INTRODUCTION .............................................................................. 3 07 11. COPYRIGHT PROTECTION FOR COMPUTER SOFTWARE 1. 0 ........... 313 A. A PersonalAccount .................................................................. 313 B. Setting the Stage ....................................................................... 314 1. The Intellectual Property Backdrop: Legislation and Legislative History .......................................................... 315 -

Pagetable.Com
12/11/2019 Microsoft BASIC for 6502 Original Source Code [1978] – pagetable.com pagetable.com About Some Assembly Required Twitter: Microsoft BASIC for 6502 Original @pagetable Source Code [1978] Mastodon: 2015-01-13 by Michael Steil @pagetable@mastodo n.social This is the original 1978 source code of Microsoft BASIC for 6502 with all original comments, documentation and easter eggs: Categories 6502 Amiga Apple Archeology BASIC Bildschirmtext C64 C128 https://www.pagetable.com/?p=774 1/31 12/11/2019 Microsoft BASIC for 6502 Original Source Code [1978] – pagetable.com TITLE BASIC M6502 8K VER 1.1 BY MICRO-SOFT SEARCH M6502 Commodore SALL RADIX 10 ;THROUGHOUT ALL BUT MATH-PAK. Commodore Peripheral Digital Video DOS $Z:: ;STARTING POINT FOR M6502 SIMULATOR Bus Final ORG 0 ;START OFF AT LOCATION ZERO. SUBTTL SWITCHES,MACROS. Cartridge III Floppy REALIO=4 ;5=STM Disks Game Boy GEOS ;4=APPLE. ;3=COMMODORE. ;2=OSI GitHub Hacks ;1=MOS TECH,KIM Hardware KERNAL ;0=PDP-10 SIMULATING 6502 INTPRC==1 ;INTEGER ARRAYS. ADDPRC==1 ;FOR ADDITIONAL PRECISION. Literature LNGERR==0 ;LONG ERROR MESSAGES. TIME== 0 ;CAPABILITY TO SET AND READ A CLK. Operating Systems EXTIO== 0 ;EXTERNAL I/O PET Presentation M6502.MAC (1978-07-27, 6955 lines, 161,685 bytes) Puzzle SCUMM Security Tapes This is currently the oldest publicly available piece of source written by Bill Gates. Teardown TED Tricks Trivia Uncategorized Language VIC-20 Virtualization Whines X16 x86 Xbox Like the 8080 version, the 6502 version was developed on a PDP-10, using the MACRO-10 assembler. A set of macros developed by Paul Allen allowed MACRO-10 to understand and translate 6502 assembly, albeit in a modified format to fit the syntax of macros, for example: github MOS 6502 MACRO-10 LDA #0 LDAI 0 https://www.pagetable.com/?p=774 2/31 12/11/2019 Microsoft BASIC for 6502 Original Source Code [1978] – pagetable.com LDA (ADDR),Y LDADY ADDR MACRO-10 did not support hex numbers, which is why most numbers are in decimal mist64 format. -

FPCUG Notes for January 2020 Editor: Frank Fota ([email protected])
FPCUG Notes for January 2020 Editor: Frank Fota ([email protected]) SCHEDULE OF EVENTS (7:00 PM - Falmouth Firehouse, Butler Road): -- Wed, Jan 1: Happy New Year! -- Tues, Jan 9: Board of Directors (BoD) Meeting (Patty Davis, Presiding) -- Thu, Jan 11: General Meeting. Deaf and Hard of Hearing Coordinator, ReBecca Bennett and Deaf and Hard of Hearing Assistant, Diann Drew of the disAbility Resource Center will discuss Assistive Technology for the deaf and hard of hearing and how to get a Service Dog. The public is invited and refreshments will be served. -- Tues, Jan 14: All About Your Computer (Robert Monroe) -- Wed, Jan 15: Experimax Workshop – 1865-106 Carl D. Silver Parkway -- Mon, Jan 20: Martin Luther King Day -- Thu, Jan 24: Windows All Workshop (Jim Hopkins) – weather permitting TOP TECH OF 2019 In a CNET video review, Jason Hiner lists 44 outstanding products in five popular categories in tech: mobile; home entertainment; computers; smart home; and software, apps, and services. A video montage is embedded in the article linked above. 1. Mobile. CNET names the Motorola Moto G7 as a great budget phone. Their high-end nominee was the Samsung Galaxy Note 10 for its mix of style and substance. On a personal note, pardon the pun, the Note 10 was not prone to spontaneous combustion. Based on the additional features and a price drop, the iPhone 11 was noted in the middle. 2. Home Entertainment. Two TVs led this category. The TCL 6-Series image and color quality rival that of much more expensive televisions. The LG OLED B9 presented unmatched contrast and viewing angles.