Users Guide for M2-200/200S-FW
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Later Han Empire (25-220CE) & Its Northwestern Frontier
University of Pennsylvania ScholarlyCommons Publicly Accessible Penn Dissertations 2012 Dynamics of Disintegration: The Later Han Empire (25-220CE) & Its Northwestern Frontier Wai Kit Wicky Tse University of Pennsylvania, [email protected] Follow this and additional works at: https://repository.upenn.edu/edissertations Part of the Asian History Commons, Asian Studies Commons, and the Military History Commons Recommended Citation Tse, Wai Kit Wicky, "Dynamics of Disintegration: The Later Han Empire (25-220CE) & Its Northwestern Frontier" (2012). Publicly Accessible Penn Dissertations. 589. https://repository.upenn.edu/edissertations/589 This paper is posted at ScholarlyCommons. https://repository.upenn.edu/edissertations/589 For more information, please contact [email protected]. Dynamics of Disintegration: The Later Han Empire (25-220CE) & Its Northwestern Frontier Abstract As a frontier region of the Qin-Han (221BCE-220CE) empire, the northwest was a new territory to the Chinese realm. Until the Later Han (25-220CE) times, some portions of the northwestern region had only been part of imperial soil for one hundred years. Its coalescence into the Chinese empire was a product of long-term expansion and conquest, which arguably defined the egionr 's military nature. Furthermore, in the harsh natural environment of the region, only tough people could survive, and unsurprisingly, the region fostered vigorous warriors. Mixed culture and multi-ethnicity featured prominently in this highly militarized frontier society, which contrasted sharply with the imperial center that promoted unified cultural values and stood in the way of a greater degree of transregional integration. As this project shows, it was the northwesterners who went through a process of political peripheralization during the Later Han times played a harbinger role of the disintegration of the empire and eventually led to the breakdown of the early imperial system in Chinese history. -

Chemical and Morphological Studies Could Be Made of Polysomes of Lymphoid Tissue Cells During Response to Antigen Injection
THE NA TURE OF POLYSOMES ISOLATED FROM SPLEEN CELLS OF RATS STIMULATED BY ANTIGEN* BY MARIANO F. LA VIA, t ALBERT E. VATTER, WILLIAM S. HAMMOND,t AND PATRICIA V. NORTHUP DEPARTMENT OF PATHOLOGY, UNIVERSITY OF COLORADO MEDICAL CENTER, DENVER Communicated by Paul R. Cannon, November 7, 1966 Kern and co-workers' were the first to examine the molecular mechanism of im- munoglobulin synthesis and concluded that this process is similar to the synthesis of other proteins. Recently, lymphoid tissues have been studied by more refined electron microscopic2' I and biochemical techniques4- in an effort to examine details of the mechanism of synthesis of antibody. The data presented in many of these studies are difficult to reconcile with present models of polypeptide synthesis on polysomes. The current hypothesis is that the size of a fully functional polysome should be compatible with the size of the product of synthesis.7 Thus for L and H chains one would expect polysomes in the range of 7 and 15 ribosomes, respectively. The examination of polysomal units of immunoglobulin synthesis isolated from lymph node and spleen homogenates has been complicated by the presence of high- activity ribonucleases (RNases). These tissues seem to lack the RNase inhibitors present in liver cells.8 The contradictory results of experiments in this field might be due to endogenous RNases. On the other hand, synthesis of an antibody mole- cule might proceed differently from the model proposed for other polypeptides. The work reported here is the result of efforts to develop a system in which bio- chemical and morphological studies could be made of polysomes of lymphoid tissue cells during response to antigen injection. -

Systematic and Dramatic Tuning on Gas Sorption Performance In
Communication pubs.acs.org/JACS Systematic and Dramatic Tuning on Gas Sorption Performance in Heterometallic Metal−Organic Frameworks † ‡ † † † Quan-Guo Zhai, Xianhui Bu,*, Chengyu Mao, Xiang Zhao, and Pingyun Feng*, † Department of Chemistry, University of California, Riverside, California 92521, United States ‡ Department of Chemistry and Biochemistry, California State University, Long Beach, California 90840, United States *S Supporting Information challenge is how to deal with the infinite possibilities, and more so ABSTRACT: Despite their having much greater potential the perceived impossibilities, of combining metals to create high- for compositional and structural diversity, heterometallic performance materials. Prior to this work, there were few, if any, − metal organic frameworks (MOFs) reported so far have high-performance CO2 capture materials based on heterometallic lagged far behind their homometallic counterparts in terms MOFs. of CO2 uptake performance. Now the power of We are particularly interested in the integration of chemically heterometallic MOFs is in full display, as shown by a dissimilar metals, as such combinations are more likely to lead to series of new materials (denoted CPM-200s) with superior much greater variations in properties. Heterometallic MOFs 3 CO2 uptake capacity (up to 207.6 cm /g at 273 K and 1 containing similar metals (e.g., many combinations of 3d metals, bar), close to the all-time record set by MOF-74-Mg. The any combination of 4f metals) are not uncommon. In addition, a isosteric heat of adsorption can also be tuned from −16.4 number of heterometallic MOFs containing dissimilar metals kJ/mol for CPM-200-Sc/Mg to −79.6 kJ/mol for CPM- (e.g., In and Co) have also been reported.4 In general, dissimilar 200-V/Mg. -

ET 200S Interfacemodule IM 151/CPU
Important Notes, Contents 1 SIMATIC Product Overview Addressing 2 ET 200S Interface Module ET 200S in the PROFIBUS Network 3 IM 151/CPU Commissioning and Diagnostics 4 Functions of the IM 151/CPU 5 Manual Technical Specifications 6 This manual is part of the document package with the order number: 6ES7 151-1AA00-8BA0 Cycle and Response Times 7 Getting Started 8 Configuration Frame and Parameter Assignment Frame for the ET 200S A Instruction List B Execution Times of the SFCs and SFBs C Migration of the IM 151/CPU D Glossary, Index Edition 05/2000 A5E00058783-01 OChapter Safety Guidelines This manual contains notices which you should observe to ensure your own personal safety, as well as to protect the product and connected equipment. These notices are highlighted in the manual by a warning triangle and are marked as follows according to the level of danger: Danger ! indicates that death, severe personal injury or substantial property damage will result if proper precau- tions are not taken. Warning ! indicates that death, severe personal injury or substantial property damage can result if proper precau- tions are not taken. Caution ! indicates that minor personal injury or property damage can result if proper precautions are not taken. Note draws your attention to particularly important information on the product, handling the product, or to a particular part of the documentation. Qualified Personnel Only qualified personnel should be allowed to install and work on this equipment. Qualified persons are defined as persons who are authorized to commission, to ground, and to tag circuits, equipment, and systems in accordance with established safety practices and standards. -
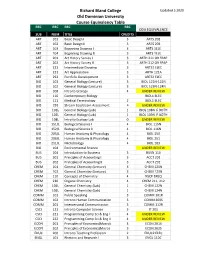
Richard Bland College Old Dominion University Course Equivalency Table
Richard Bland College Updated 5.2020 Old Dominion University Course Equivalency Table RBC RBC RBC RBC ODU EQUIVALENCE SUB NUM TITLE CREDITS ART 101 Basic Design I 3 ARTS 202 ART 102 Basic Design II 3 ARTS 203 ART 103 Beginning Drawing I 3 ARTS 1ELE ART 104 Beginning Drawing II 3 ARTS 1ELE ART 201 Art History Survey I 3 ARTH 211 OR FPAP ART 202 Art History Survey II 3 ARTH 212 OR FPAP ART 221 Intermediate Drawing 3 ARTS2 ELEC ART 231 Art Appreciation 3 ARTH 121A ART 292 Portfolio Development 3 ARTS2 ELEC BIO 101 General Biology (Lecture) 3 BIOL 121N-122N BIO 102 General Biology (Lecture) 3 BIOL 123N-124N BIO 108 Intro to Ecology 4 UNDER REVIEW BIO 110 Contemporary Biology BIOL1 ELEC BIO 111 Medical Terminology 2 BIOL1 ELEC BIO 291 Stream Ecostream Assessment 4 UNDER REVIEW BIO 101L General Biology (Lab) 1 BIOL 108N IF BOTH BIO 102L General Biology (Lab) 1 BIOL 109N IF BOTH BIO 108L Intro to Ecology Lab 0 UNDER REVIEW BIO 151/L Biological Science I 4 BIOL 115N BIO 152/L Biological Science II 4 BIOL 116N BIO 205/L Human Anatomy & Physiology 4 BIOL 250 BIO 206/L Human Anatomy & Physiology 4 BIOL 251 BIO 211/L Microbiology 4 BIOL 103 BIO 104 Environmental Science UNDER REVIEW BUS 104 Introduction to Business 3 BUSN 110 BUS 201 Principles of Accounting I 3 ACCT 201 BUS 202 Principles of Accounting II 3 ACCT 202 CHEM 101 General Chemistry (Lecture) 3 CHEM 121N CHEM 102 General Chemistry (Lecture) 3 CHEM 123N CHEM 110 Concepts of Chemistry 4 NSCP 1REQ CHEM 230 Organic Chemistry 4 CHEM 211, 212 CHEM 101L General Chemistry (Lab) 1 CHEM 122N CHEM -

Gastroenterology®
World Journal of Supported by NSFC Gastroenterology 2005-2006 Volume 11 Number 23 ELSEVIER June 21, 2005 National Journal Award Contents 2005 LIVER CANCER 3491 Hepatitis B and alcohol affect survival of hepatocellular carcinoma patients Wong LL, Limm WM, Tsai N, Severino R 3498 Overexpression of Bax induces apoptosis and enhances drug sensitivity of hepatocellular cancer-9204 cells Zheng JY, Yang GS, Wang WZ, Li J, Li KZ, Guan WX, Wang WL VIRAL HEPATITIS 3504 Effective inhibition of expression of hepatitis B virus genes by DNAzymes Wo JE, Wu XL, Zhou LF, Yao HP, Chen LW, Dennin RH 3508 Pancreatic involvement in chronic viral hepatitis Katakura Y, Yotsuyanagi H, Hashizume K, Okuse C, Okuse N, Nishikawa K, Suzuki M, Iino S, Itoh F Helicobacter pylori 3514 Direct measurement of gastric H+/K+-ATPase activities in patients with or without Helicobacter pylori-associated chronic gastritis Thong-Ngam D, Tangkijvanich P, Sampatanukul P, Prichakas P, Mahachai V, Tosukowong P 3518 Patients with Helicobacter pylori positive and negative duodenal ulcers have distinct clinical characteristics Chu KM, Kwok KF, Law S, Wong KH 3523 Distribution of Helicobacter pylori in north China Gong YH, Wang Y, Yuan Y 3528 Helicobacter pylori specific immune response induced by conservative flagellin linear B-cell epitope Ji WS, Hu JL, Wu KC, Qiu JW, Han ZY, Ding J, Fan DM BASIC RESEARCH 3533 Glutamine is highly effective in preventing in vivo cobalt-induced oxidative stress in rat liver Gonzales S, Polizio AH, Erario MA, Tomaro ML 3539 Effects of Changtai granules, -

GOVERNMENT of the DISTRICT of COLUMBIA Executive Office of the Mayor OFFICE of PARTNERSHIPS and GRANTS DEVELOPMENT
GOVERNMENT OF THE DISTRICT OF COLUMBIA Executive Office of the Mayor OFFICE OF PARTNERSHIPS AND GRANTS DEVELOPMENT THIRD QUARTER REPORT ON DONATIONS APPROVED BY OPGD FOR FY 2003 Pursuant to Mayor’s Order 2002-2 dated January 11, 2002, the Director of the Office of Partnerships and Grants Development (OPGD), in consultation with the Office of the Corporation Counsel’s Ethics Counselor, is publishing the District’s Third Quarter Report on Donations for Fiscal Year 2003. The Order requires the OPGD Director to review all requests by District officials to solicit or accept donations and approve or disapprove such requests as appropriate in accordance with the Rules of Conduct Governing Donations (Mayor’s Memorandum 2002-1) and Section 115 of the 2003 D.C. Appropriations Act. This report includes data on all donation requests submitted to the Director for the period beginning April 1, 2003 and ending June 30, 2003. During this period, the OPGD Director approved the solicitation and/or acceptance of $142,991 in donations of which $2,265 represented financial contributions, and $140,726 represented in-kind contributions. Please contact the OPGD Director at (202) 727-8900 for more details on the report. District Recipient Donor Donation Information Approval Date Child and Family Washington Metro Area CFSA will begin soliciting donations to Authority to solicit the Services Agency Transit Authority support the FY 2004 annual Project Harvest donation approved on and the holiday gift drive. 6-30-03 Child and Family Victoria Perry, An in-kind donation of 80-100 pieces of Authority to accept the Services Agency Pam and Ruth Summers luggage valued at $300 that will be used by donation approved on children to transport belongings between 6-26-03 placements. -

Fort Peck Court of Appeals Assiniboine and Sioux Tribes Fort Peck Indian Reservation Poplar, Montana ********************************
Long-vs-Long FORT PECK COURT OF APPEALS ASSINIBOINE AND SIOUX TRIBES FORT PECK INDIAN RESERVATION POPLAR, MONTANA ******************************** DOUGLAS LONG, APPELLANT vs. Appeal No. 204 SANDRA LONG, APPELLEE ********************* ORDER ********************* FACTS The parties were married on September 4,TT9W7 at the time of the marriage, Petitioner, Sandra Long hereinafter "Sandra" was pregnant. The child, Garvin was born on 1991. The respondent, Douglas Long, hereinafter "Douglas" was present at the birth of Garvin. Douglas asserts that Sandra granted her permission and had knowledge that Douglas be named as the father on Garvin's birth certificate; Sandra denies the same. Both parties agree that Douglas is not the child's father. The biological father has remained unnamed herein and in fact has had no contact with Garvin nor contributed to the support of Garvin. The couple separated. Sandra filed for Divorce. It is undisputed that from the time of the child's birth to the time of the filing of the appeal, the only father the child has known is Douglas Long. Upon receipt of thepetition for dissolution, Douglas applied to the Tribal Court for visitation and voluntarily agreed to pay child support in the amount of $200.00 per month until the lower court denied Douglas future contact with Garvin. Mr. Long asserts that he remains completely willing to provide for the support of Garvin and is willing to-pay-any-reasonable support awarded. Mr. Long has regularly exercised visitation up until the Court Order of October 20, 1993. ISSUE http://www.fptc.org/Appellate%20Opinions/204.htm (1 of 4) [12/4/2008 1:44:38 PM] Long-vs-Long Whether the appellant, being a non-biological parent, has a right to visitation equal to that of a biological parent? RULE The appellant argues that this a is case where equitable parenthood should attach. -
Deep Sequencing and Mirna Profiles in Alcohol-Induced
www.nature.com/scientificreports OPEN Deep sequencing and miRNA profles in alcohol-induced neuroinfammation and the TLR4 Received: 20 June 2018 Accepted: 10 October 2018 response in mice cerebral cortex Published: xx xx xxxx J. R. Ureña-Peralta 1, S. Alfonso-Loeches1, C. M. Cuesta-Diaz1, F. García-García2 & C. Guerri1 Alcohol abuse can induce brain injury and neurodegeneration, and recent evidence shows the participation of immune receptors toll-like in the neuroinfammation and brain damage. We evaluated the role of miRNAs as potential modulators of the neuroinfammation associated with alcohol abuse and the infuence of the TLR4 response. Using mice cerebral cortex and next-generation sequencing (NGS), we identifed miRNAs that were diferentially expressed in the chronic alcohol-treated versus untreated WT or TLR4-KO mice. We observed a diferentially expression of miR-183 Cluster (C) (miR-96/- 182/-183), miR-200a and miR-200b, which were down-regulated, while mirR-125b was up-regulated in alcohol-treated WT versus (vs.) untreated mice. These miRNAs modulate targets genes related to the voltage-gated sodium channel, neuron hyperexcitability (Nav1.3, Trpv1, Smad3 and PP1-γ), as well as genes associated with innate immune TLR4 signaling response (Il1r1, Mapk14, Sirt1, Lrp6 and Bdnf). Functional enrichment of the miR-183C and miR-200a/b family target genes, revealed neuroinfammatory pathways networks involved in TLR4 signaling and alcohol abuse. The changes in the neuroinfammatory targets genes associated with alcohol abuse were mostly abolished in the TLR4-KO mice. Our results show the relationship between alcohol intake and miRNAs expression and open up new therapeutically targets to prevent deleterious efects of alcohol on the brain. -

Cao 2015-033
CAO 2015-033 To: Walter Foeman From: Craig E. Leen, City Attorney for the City of Coral Gables {!__ RE: Legal Opinion Regarding Correction To Section 50-26(c) Of The City Code Date: April17, 2015 Pursuant to section 2-201(e)(9) of the City Code, authorizing the City Attorney to correct language in the City Code, along with attached Resolution No. 2008-75, which contains a repealer clause along with an irrevocable election to participate in FRS for elected officials taking office on or after October 1, 2008, and along with state law relating to FRS, which is applicable to the City's elected officials via this irrevocable election, it is my determination that section 50-26(c) of the City Code must be corrected as follows (underlined portion must be added): (c) Further provided, however, that it shall not be mandatory for any elected official of the city to participate in the system, but such elected official shall have the option of participation in the system. A member of the city commission may exercise his option to decline participation in the system at any time. In the event that any of the elected officials choose to participate in a retirement plan other than the system, the city will contribute a sum not to exceed 6\tl percent of the elected official's compensation to that plan. The effective date of the option to participate shall be the date the elected official takes office. Notwithstanding the foregoing. elected officials who take office on or after October 1. 2008 shall become members of the Florida Retirement System in accordance with applicable law. -

Rethinking Chinese Kinship in the Han and the Six Dynasties: a Preliminary Observation
part 1 volume xxiii • academia sinica • taiwan • 2010 INSTITUTE OF HISTORY AND PHILOLOGY third series asia major • third series • volume xxiii • part 1 • 2010 rethinking chinese kinship hou xudong 侯旭東 translated and edited by howard l. goodman Rethinking Chinese Kinship in the Han and the Six Dynasties: A Preliminary Observation n the eyes of most sinologists and Chinese scholars generally, even I most everyday Chinese, the dominant social organization during imperial China was patrilineal descent groups (often called PDG; and in Chinese usually “zongzu 宗族”),1 whatever the regional differences between south and north China. Particularly after the systematization of Maurice Freedman in the 1950s and 1960s, this view, as a stereo- type concerning China, has greatly affected the West’s understanding of the Chinese past. Meanwhile, most Chinese also wear the same PDG- focused glasses, even if the background from which they arrive at this view differs from the West’s. Recently like Patricia B. Ebrey, P. Steven Sangren, and James L. Watson have tried to challenge the prevailing idea from diverse perspectives.2 Some have proven that PDG proper did not appear until the Song era (in other words, about the eleventh century). Although they have confirmed that PDG was a somewhat later institution, the actual underlying view remains the same as before. Ebrey and Watson, for example, indicate: “Many basic kinship prin- ciples and practices continued with only minor changes from the Han through the Ch’ing dynasties.”3 In other words, they assume a certain continuity of paternally linked descent before and after the Song, and insist that the Chinese possessed such a tradition at least from the Han 1 This article will use both “PDG” and “zongzu” rather than try to formalize one term or one English translation. -

PARTS PRICE LIST L 3/1/16 Parts Multiplier Rev
RITE ENGINEERING & MFG. CORP. 5832 GARFIELD AVE. COMMERCE, CA 90040 Tel: 562-862-2135 Fax.562-861-9821 PARTS PRICE LIST L 3/1/16 Parts Multiplier Rev. 6 Boiler Serial Number required on all Parts Orders HEADPLATE GASKETS FOR ATMOSPHERIC WATER BOILERS BOILER MODELS PART NUMBER LIST PRICE 15 through 42 21W (two required) 48 through 76 & A90 33W “ 85-200 except “A” prefix 53W “ A150, A165, A180, A200 84W “ 225-500 except “A” prefix 84W “ 550, 600, A650, A700, A750 122W “ A400, A450, A500, A550, A600, 650, 700, 750 148W “ 840 through 1250 188W “ HEADPLATE GASKETS FOR POWER BURNER FIRED WATER BOILERS BOILER MODELS PART NUMBER LIST PRICE 15 through 42 21W (two required) 48 through 76 33W “ 85 through 200 except “A” prefix 53W “ A150, A165, A180, A200, 84W “ 225 through 375 84W “ 400 through 600 except A prefix,but including A650, A700,A750 122W “ A400, A450, A500, A550, A600, 650,700, 750 148W “ 840 through 1250 188W “ HEADPLATE GASKETS FOR 15 PSIG LOW PRESSURE STEAM & HIGH “E” BOILERS BOILER MODELS PART NUMBER LIST PRICE 15S through 42S 21S (two required) 48S through 76S, 48E through 76E & A90 33S “ 85S through 200S, 85E through 200E, except “A” prefix 53S “ A150 S&E, A165 S&E, A180 S&E, A200 S&E, 225 S&E 84S “ through 375 S&E and 400E, 425E, 450E, 475E, and 500E 400S through 600S except “A” prefix, but including A650S, 122S “ A700S, A750S, 550E, 600E, A650E, A700E, and A750E A400 S&E, A450 S&E, A500 S&E, A550 S&E, A600 S&E, 148S “ 650 S&E, 700 S&E, 750 S&E 840S through 1250S & 840E through 1250E 188S “ HEADPLATE GASKETS FOR 150 PSIG HIGH PRESSURE STEAM “P” BOILERS BOILER MODELS PART NUMBER LIST PRICE P9.5 through P20 P___ Gasket (2 req’d) P25 through P50 P___ Gasket “ P75 through P125 P___ Gasket “ P150 through P250 (Specify front or rear) P___ Gasket “ HEADPLATE GASKETS FOR DURAFIN “D” WATER BOILERS DESCRIPTION PART NUMBER LIST PRICE D300 through D2500 D___ Gasket (2 req’d) DA2000 through D5000 D___ Gasket “ D5500 through D7500 D___ Gasket “ D8000 through D10000 D___ Gasket “ - 1 - RITE ENGINEERING & MFG.