V10 Users' Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Micro-Ruler MR-1 a NPL (NIST Counterpart in the U.K.)Traceable Certified Reference Material
Micro-Ruler MR-1 A NPL (NIST counterpart in the U.K.)Traceable Certified Reference Material . ATraceable “Micro-Ruler”. Markings are all on one side. Mirror image markings are provided so right reading numbers are always seen. The minimum increment is 0.01mm. The circles (diameter) and square boxes (side length) are 0.02, 0.05, 0.10, 0.50, 1.00, 2.00 and 5.00mm. 150mm OVERALL LENGTH 150mm uncertainty: ±0.0025mm, 0-10mm: ±0.0005mm) 0.01mm INCREMENTS, SQUARES & CIRCLES UP TO 5mm TED PELLA, INC. Microscopy Products for Science and Industry P. O. Box 492477 Redding, CA 96049-2477 Phone: 530-243-2200 or 800-237-3526 (USA) • FAX: 530-243-3761 [email protected] www.tedpella.com DOES THE WORLD NEED A TRACEABLE RULER? The MR-1 is labeled in mm. Its overall scale extends According to ISO, traceable measurements shall be over 150mm with 0.01mm increments. The ruler is designed to be viewed from either side as the markings made when products require the dimensions to be are both right reading and mirror images. This allows known to a specified uncertainty. These measurements the ruler marking to be placed in direct contact with the shall be made with a traceable ruler or micrometer. For sample, avoiding parallax errors. Independent of the magnification to be traceable the image and object size ruler orientation, the scale can be read correctly. There is must be measured with calibration standards that have a common scale with the finest (0.01mm) markings to traceable dimensions. read. We measure and certify pitch (the distance between repeating parallel lines using center-to-center or edge-to- edge spacing. -
Verification Regulation of Steel Ruler
ITTC – Recommended 7.6-02-04 Procedures and guidelines Page 1 of 15 Effective Date Revision Calibration of Micrometers 2002 00 ITTC Quality System Manual Sample Work Instructions Work Instructions Calibration of Micrometers 7.6 Control of Inspection, Measuring and Test Equipment 7.6-02 Sample Work Instructions 7.6-02-04 Calibration of Micrometers Updated / Edited by Approved Quality Systems Group of the 28th ITTC 23rd ITTC 2002 Date: 07/2017 Date: 09/2002 ITTC – Recommended 7.6-02-04 Procedures and guidelines Page 2 of 15 Effective Date Revision Calibration of Micrometers 2002 00 Table of Contents 1. PURPOSE .............................................. 4 4.6 MEASURING FORCE ......................... 9 4.6.1 Requirements: ............................... 9 2. INTRODUCTION ................................. 4 4.6.2 Calibration Method: ..................... 9 3. SUBJECT AND CONDITION OF 4.7 WIDTH AND WIDTH DIFFERENCE CALIBRATION .................................... 4 OF LINES .............................................. 9 3.1 SUBJECT AND MAIN TOOLS OF 4.7.1 Requirements ................................ 9 CALIBRATION .................................... 4 4.7.2 Calibration Method ...................... 9 3.2 CALIBRATION CONDITIONS .......... 5 4.8 RELATIVE POSITION OF INDICATOR NEEDLE AND DIAL.. 10 4. TECHNICAL REQUIREMENTS AND CALIBRATION METHOD ................. 7 4.8.1 Requirements .............................. 10 4.8.2 Calibration Method: ................... 10 4.1 EXTERIOR ............................................ 7 4.9 DISTANCE -

MICHIGAN STATE COLLEGE Paul W
A STUDY OF RECENT DEVELOPMENTS AND INVENTIONS IN ENGINEERING INSTRUMENTS Thai: for III. Dean. of I. S. MICHIGAN STATE COLLEGE Paul W. Hoynigor I948 This]: _ C./ SUPP! '3' Nagy NIH: LJWIHL WA KOF BOOK A STUDY OF RECENT DEVELOPMENTS AND INVENTIONS IN ENGINEERING’INSIRUMENTS A Thesis Submitted to The Faculty of MICHIGAN‘STATE COLLEGE OF AGRICULTURE AND.APPLIED SCIENCE by Paul W. Heyniger Candidate for the Degree of Batchelor of Science June 1948 \. HE-UI: PREFACE This Thesis is submitted to the faculty of Michigan State College as one of the requirements for a B. S. De- gree in Civil Engineering.' At this time,I Iish to express my appreciation to c. M. Cade, Professor of Civil Engineering at Michigan State Collegeafor his assistance throughout the course and to the manufacturers,vhose products are represented, for their help by freely giving of the data used in this paper. In preparing the laterial used in this thesis, it was the authors at: to point out new develop-ants on existing instruments and recent inventions or engineer- ing equipment used principally by the Civil Engineer. 20 6052 TAEEE OF CONTENTS Chapter One Page Introduction B. Drafting Equipment ----------------------- 13 Chapter Two Telescopic Inprovenents A. Glass Reticles .......................... -32 B. Coated Lenses .......................... --J.B Chapter three The Tilting Level- ............................ -33 Chapter rear The First One-Second.Anerican Optical 28 “00d011 ‘6- -------------------------- e- --------- Chapter rive Chapter Six The Latest Type Altineter ----- - ................ 5.5 TABLE OF CONTENTS , Chapter Seven Page The Most Recent Drafting Machine ........... -39.--- Chapter Eight Chapter Nine SmOnnB By Radar ....... - ------------------ In”.-- Chapter Ten Conclusion ------------ - ----- -. -

1. Hand Tools 3. Related Tools 4. Chisels 5. Hammer 6. Saw Terminology 7. Pliers Introduction
1 1. Hand Tools 2. Types 2.1 Hand tools 2.2 Hammer Drill 2.3 Rotary hammer drill 2.4 Cordless drills 2.5 Drill press 2.6 Geared head drill 2.7 Radial arm drill 2.8 Mill drill 3. Related tools 4. Chisels 4.1. Types 4.1.1 Woodworking chisels 4.1.1.1 Lathe tools 4.2 Metalworking chisels 4.2.1 Cold chisel 4.2.2 Hardy chisel 4.3 Stone chisels 4.4 Masonry chisels 4.4.1 Joint chisel 5. Hammer 5.1 Basic design and variations 5.2 The physics of hammering 5.2.1 Hammer as a force amplifier 5.2.2 Effect of the head's mass 5.2.3 Effect of the handle 5.3 War hammers 5.4 Symbolic hammers 6. Saw terminology 6.1 Types of saws 6.1.1 Hand saws 6.1.2. Back saws 6.1.3 Mechanically powered saws 6.1.4. Circular blade saws 6.1.5. Reciprocating blade saws 6.1.6..Continuous band 6.2. Types of saw blades and the cuts they make 6.3. Materials used for saws 7. Pliers Introduction 7.1. Design 7.2.Common types 7.2.1 Gripping pliers (used to improve grip) 7.2 2.Cutting pliers (used to sever or pinch off) 2 7.2.3 Crimping pliers 7.2.4 Rotational pliers 8. Common wrenches / spanners 8.1 Other general wrenches / spanners 8.2. Spe cialized wrenches / spanners 8.3. Spanners in popular culture 9. Hacksaw, surface plate, surface gauge, , vee-block, files 10. -

FIELD EXTENSIONS and the CLASSICAL COMPASS and STRAIGHT-EDGE CONSTRUCTIONS 1. Introduction to the Classical Geometric Problems 1
FIELD EXTENSIONS AND THE CLASSICAL COMPASS AND STRAIGHT-EDGE CONSTRUCTIONS WINSTON GAO Abstract. This paper will introduce the reader to field extensions at a rudi- mentary level and then pursue the subject further by looking to its applications in a discussion of some constructibility issues in the classical straight-edge and compass problems. Field extensions, especially their degrees are explored at an introductory level. Properties of minimal polynomials are discussed to this end. The paper ends with geometric problems and the construction of polygons which have their proofs in the roots of field theory. Contents 1. introduction to the classical geometric problems 1 2. fields, field extensions, and preliminaries 2 3. geometric problems 5 4. constructing regular polygons 8 Acknowledgments 9 References 9 1. Introduction to the Classical Geometric Problems One very important and interesting set of problems within classical Euclidean ge- ometry is the set of compass and straight-edge questions. Basically, these questions deal with what is and is not constructible with only an idealized ruler and compass. The ruler has no markings (hence technically a straight-edge) has infinite length, and zero width. The compass can be extended to infinite distance and is assumed to collapse when lifted from the paper (a restriction that we shall see is irrelevant). Given these, we then study the set of constructible elements. However, while it is interesting to note what kinds objects we can create, it is far less straight forward to show that certain objects are impossible to create with these tools. Three famous problems that we will investigate will be the squaring the circle, doubling the cube, and trisecting an angle. -

Verification Regulation of Steel Ruler
ITTC – Recommended 7.6 - 02- 01 Procedures and Guidelines Page 1 of 7 Sample Work Instructions Effective Date Revision 2002 00 Calibration of Steel Rulers Table of Contents PURPOSE…………………………………...2 Edges………………………………….4 3.5.1 Requirements ...............................4 WORK INSTRUCTION……………………2 3.5.2 Method of Calibration..................4 3.6 Thickness of the Side Edge………….5 1 Introduction…………………………2 3.6.1 Method of Calibration..................5 2 Items and Condition of Calibration…..2 3.7 Arc Radius at the Intersecting Position of the End and the Side 3 Technical Requirements and Calibration Edges………………………………….5 Method……………………………………….2 3.7.1 Requirements ...............................5 3.1 Exterior………………………………2 3.7.2 Method Calibration......................5 3.1.1 Requirements ...............................2 3.8 Width and Difference Between the 3.2 Flatness of ruler face………………..3 Lines…………………………………..5 3.2.1 Requirements ...............................3 3.8.1 Requirements ...............................5 3.2.2 Method of Calibration..................4 3.8.2 Method of Calibration..................5 3.3 Elasticity……………………………..4 3.9 Error of Indication…………………..5 3.3.1 Requirements ...............................4 3.9.1 Requirements ...............................5 3.3.2 Method of Calibration..................4 3.9.2 Method of Calibration..................6 3.4 Linearity of the Ruler End and Side 4 Treatment of the Calibration Result and Edges………………………………….4 the Calibration Period………………….7 3.4.1 Requirements ...............................4 -
Marking Gauge
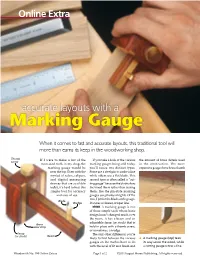
Online Extra accurate layouts with a Marking Gauge When it comes to fast and accurate layouts, this traditional tool will more than earns its keep in the woodworking shop. Thumb If I were to make a list of the If you take a look at the various the amount of brass details used screw most-used tools in my shop, the marking gauges being sold today, in the construction. The more marking gauge would be you’ll notice two distinct types. expensive gauges have brass thumb near the top. Even with the Some use a steel pin to scribe a line myriad of rulers, calipers, while others use a flat blade. This and digital measuring second type is often called a “cut- devices that are available ting gauge” because the blade slices today, it’s hard to beat this the wood fibers rather than tearing simple tool for accuracy them, like the pin-style marking and ease of use. gauges (see photos at right). Of the two, I prefer the blade-style gauge. Blade Wedge It scores a cleaner, crisper line. DESIGN. A marking gauge is one of those simple tools whose basic design hasn’t changed much over the years. It has a beam and an adjustable fence (or stock) that is Brass wear strip held in place with a thumb screw, or sometimes, a wedge. Fence The only other differences you’re (or stock) Beam likely to find between the various { A marking gauge (top) tears gauges on the market have to do its way across the wood, while with the level of fit and finish and a cutting gauge scores a line. -
Chisel Quilts
1501 Easy Chisel Quilts REQUIRED GO! Baby Friendly Twelve Star Quilt Quilt 49” x 61” Finished Block SizeSize 11½”11½” Teresa Varnes Amie Potter Long Braid Tablee RunneRunnerr 14” x 102” Finished Width ooff BrBraidaid 6” Eleanor Burns Judy Jackson Medium Length Braid Table Runner 14” x 54” 2 Select from a Star Lap Robe or Braid Table Runer in two sizes featuring AccuQuilt® Die #55039 for Chisels. The Star also uses Die #55009 for Half Square Triangles. This die is #3 from the 6” Mix and Match series. The Chisel die cuts two shapes at a time. Chisels #55039 The Half Square Half Square Triangle Triangle die cuts four #55009 shapes at a time. Carefully follow cutting instructions, because they are not the same for both projects. Chisels for Star Lap Robe are cut from strips placed right side up. Chisels for Braid Table Runner are cut from strips placed wrong sides together in pairs. 3 Fabric Selection Decide on the theme or era of your projects, such as Civil War, Depression, Traditional, Modern, Juvenile, or Holiday. It's easy to select from a line that a designer put together in a variety of prints and solids, or ones that appear solid. A total of eighteen fat quar- ters is enough for both projects, including two Table Runners in the medium length. Select twelve medium to dark print fat quarters in a variety of values, colors, and scales. Select six Background prints in similar values but different textures that appear solid and do not distract from prints. Twelve Fat Quarters Six Backgrounds In additional, purchase fabric listed on page 5 for finishing your project. -

Schut for Precision
Schut for Precision Protractors / Clinometers / Spirit levels Accuracy of clinometers/spirit levels according DIN 877 Graduation Flatness (µm) µm/m " (L = length in mm) ≤ 50 ≤ 10 4 + L / 250 > 50 - 200 > 10 - 40 8 + L / 125 L > 200 > 40 16 + / 60 C08.001.EN-dealer.20110825 © 2011, Schut Geometrische Meettechniek bv 181 Measuring instruments and systems 2011/2012-D Schut.com Schut for Precision PROTRACTORS Universal digital bevel protractor This digital bevel protractor displays both decimal degrees and degrees-minutes-seconds at the same time. Measuring range: ± 360 mm. Reversible measuring direction. Resolution: 0.008° and 30". Fine adjustment. Accuracy: ± 0.08° or ± 5'. Delivery in a case with three blades (150, 200 Mode: 0 - 90°, 0 - 180° or 0 - 360°. and 300 mm), a square and an acute angle On/off switch. attachment. Reset/preset. Power supply: 1 battery type CR2032. Item No. Description Price 907.885 Bevel protractor Option: 495.157 Spare battery Single blades Item No. Blade length/mm Price 909.380 150 909.381 200 909.382 300 909.383 500 909.384 600 909.385 800 C08.302.EN-dealer.20110825 © 2011, Schut Geometrische Meettechniek bv 182 Measuring instruments and systems 2011/2012-D Schut.com Schut for Precision PROTRACTORS Universal digital bevel protractor This stainless steel, digital bevel protractor is Item No. Description Price available with blades from 150 to 1000 mm. The blades and all the measuring faces are hardened. 855.820 Bevel protractor Measuring range: ± 360°. Options: Resolution: 1', or decimal 0.01°. 495.157 Spare battery Accuracy: ± 2'. 905.409 Data cable 2 m Repeatability: 1'. -

Surprising Constructions with Straightedge and Compass
Surprising Constructions with Straightedge and Compass Moti Ben-Ari http://www.weizmann.ac.il/sci-tea/benari/ Version 1.0.0 February 11, 2019 c 2019 by Moti Ben-Ari. This work is licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/3.0/ or send a letter to Creative Commons, 444 Castro Street, Suite 900, Mountain View, California, 94041, USA. Contents Introduction 5 1 Help, My Compass Collapsed! 7 2 How to Trisect an Angle (If You Are Willing to Cheat) 13 3 How to (Almost) Square a Circle 17 4 A Compass is Sufficient 25 5 A Straightedge (with Something Extra) is Sufficient 37 6 Are Triangles with the Equal Area and Perimeter Congruent? 47 3 4 Introduction I don’t remember when I first saw the article by Godfried Toussaint [7] on the “collapsing compass,” but it make a deep impression on me. It never occurred to me that the modern compass is not the one that Euclid wrote about. In this document, I present the collapsing compass and other surprising geometric constructions. The mathematics used is no more advanced than secondary-school mathematics, but some of the proofs are rather intricate and demand a willingness to deal with complex constructions and long proofs. The chapters are ordered in ascending levels of difficult (according to my evaluation). The collapsing compass Euclid showed that every construction that can be done using a compass with fixed legs can be done using a collapsing compass, which is a compass that cannot maintain the distance between its legs. -

On the Mechanization of Straightedge and Compass Constructions Pascal Schreck
On the Mechanization of Straightedge and Compass Constructions Pascal Schreck To cite this version: Pascal Schreck. On the Mechanization of Straightedge and Compass Constructions. Journal of Sys- tems Science and Complexity, Springer Verlag (Germany), 2019, 32 (1), pp.124-149. 10.1007/s11424- 019-8347-1. hal-02485474 HAL Id: hal-02485474 https://hal.archives-ouvertes.fr/hal-02485474 Submitted on 20 Feb 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Noname manuscript No. (will be inserted by the editor) On the Mechanization of Straightedge and Compass Constructions Pascal Schreck the date of receipt and acceptance should be inserted later E-mail: [email protected] Abstract The geometric constructions obtained with only straightedge and com- pass are famous and play a special role in the development of geometry. On the one hand, the constructibility of figures is a key ingredient in Euclid geometry and, on the other hand, unconstructibility gave birth to famous open problems of the ancient Greece which were unlocked only in the nineteenth century using discoveries in algebra. This paper discusses the mechanization of straightedge and compass constructions. It focuses on the algebraic approaches and presents two methods which are implemented; one is due to Lebesgue and the other one was jointly designed by Gao and Chou. -

Predicting Depth of Cut of Water-Jet in Soft Tissue Simulants Based on Finite Element Analysis with the Application to Fracture-Directed Water-Jet Steerable Needles
Predicting Depth of Cut of Water-jet in Soft Tissue Simulants based on Finite Element Analysis with the Application to Fracture-directed Water-jet Steerable Needles Mahdieh Babaiasl1, Fan Yang2, Yao Chen3, Jow-Lian Ding4, and John P. Swensen5 Abstract— Water-jet technology has been used recently in In this paper, the effect of tissue stiffness, needle diameter, medical applications including surgery, soft tissue resection, and flow rate of water-jet on depth of cut of water-jet needle bone cutting, and wound debridement. The ability to measure has been studied experimentally. A finite element model is the depth of cut of water-jet is important in these applications to selectively cut the desired tissue, and avoid damage to deeper also developed to predict the depth of cut. Predicting depth layers. For fracture-directed water-jet steerable needles, one of cut is the first step to model the motion of fracture- should be able to predict the depth of cut of water-jet in order directed water-jet steerable needles [9]. In water-jet steerable to model the motion of the steerable needle. In this paper, the needles, the needle has a fixed angle nozzle that can cut a effect of tissue stiffness, water-jet flow rate, and nozzle diameter small channel at an angle in the tissue while running the on depth of cut is studied experimentally and verified by finite element modeling. It is found that the depth of cut of water- pump at specific flow rate. The pump will be turned off, jet has a direct relationship with flow rate, and an inverse and the needle will be inserted equally to the depth of cut relationship with elastic modulus of the tissue, and diameter of channel.