Electrophysiology of a Dendritic Neuron Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Electrophysiology-Appnote.Pdf
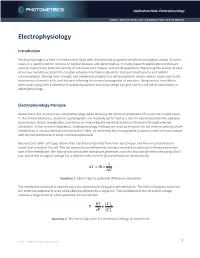
Application Note: Electrophysiology Electrophysiology Introduction Electrophysiology is a field of research that deals with the electrical properties of cells and biological tissues. In some cases, it is used to test for nervous or cardiac diseases and abnormalities. In many research applications probes are used to measure the electrical activity of individual cells, tissues, and whole specimens. Measuring the activity of cells at various membrane potentials can give valuable information about ion transport mechanisms and cellular communication. Varying ionic strength and membrane potential on cell populations can be used to study contractile movements of muscle cells, and diseases affecting the normal propagation of impulses. Using various stimulation techniques along with a selection of quality equipment and setup design can give rise to a wealth of applications in electrophysiology. Electrophysiology Principle Researchers and clinicians use electrophysiology when studying the electrical properties of neural and muscle tissue. In the clinical laboratory, electroencephalograms are routinely performed as a test for neural disorders like epilepsy, brain tumor, stroke, encephalitis, and others by measuring the electrical activity of the brain through external electrodes. In the research laboratory, electrophysiology methods are used to measure the ion-channel activity of cell membranes in various electrical environments. Here, an extremely thin micropipette is used to make intimate contact with the cell membrane to study membrane potential. Neurons and other cell types derive their electrical properties from their lipid bilayer and the ion concentrations inside and outside of the cell. The ion concentration differences create a membrane potential difference on either side of the membrane. The flow of ions across the membrane generates a current that can be measured using Ohm’s law, where the change in voltage (V) is related to the current (I) and membrane resistance (R). -

Brain Slice Preparation in Electrophysiology
Brain Slice Preparation In structural integrity, unlike cell cultures or tissue homogenates. Electrophysiology Some of the limitations of these preparations are: 1) lack of certain inputs and outputs normally existing in the Avital Schurr, Ph.D. intact brain; 2) certain portions of the sliced tissue, Department of Anesthesiology, especially the top and bottom surfaces of the slice, are University of Louisville School of Medicine, damaged by the slicing action itself; 3) the life span of a Louisville, Kentucky 40292 brain slice is limited and the tissue gets "older" at a much faster rate than the whole animal; 4) the effects of Avital Schurr is currently an Associate Professor in the decapitation ischemia on the viability of the slice are not Department of Anesthesiology at the University of well understood; 5) Since blood-borne factors may be Louisville. He received his Ph.D. in 1977 from Ben- missing from the artificial bathing medium of the brain Gurion University in Beer Sheva, Israel. From 1977 slice, they cannot benefit the preparation and thus the through 1981, he held two postdoctoral positions, one optimal composition of the bathing solution is not yet at the Baylor College of Medicine and the second at established. the University of Texas Medical School at Houston. Brain slice preparations are becoming PREPARATION OF SLICES increasingly popular among neurobiologists for the In general, rodents are the animals of choice for the study of the mammalian central nervous system preparation of brain slices. Of those, the rat and the guinea pig are the most used. After decapitation, the (CNS) in general and synaptic phenomena in brain is removed rapidly from the skull and rinsed with particular. -

Electrophysiology Read-Out Tools for Brain-On-Chip Biotechnology
micromachines Review Electrophysiology Read-Out Tools for Brain-on-Chip Biotechnology Csaba Forro 1,2,†, Davide Caron 3,† , Gian Nicola Angotzi 4,†, Vincenzo Gallo 3, Luca Berdondini 4 , Francesca Santoro 1 , Gemma Palazzolo 3,* and Gabriella Panuccio 3,* 1 Tissue Electronics, Fondazione Istituto Italiano di Tecnologia, Largo Barsanti e Matteucci, 53-80125 Naples, Italy; [email protected] (C.F.); [email protected] (F.S.) 2 Department of Chemistry, Stanford University, Stanford, CA 94305, USA 3 Enhanced Regenerative Medicine, Fondazione Istituto Italiano di Tecnologia, Via Morego, 30-16163 Genova, Italy; [email protected] (D.C.); [email protected] (V.G.) 4 Microtechnology for Neuroelectronics, Fondazione Istituto Italiano di Tecnologia, Via Morego, 30-16163 Genova, Italy; [email protected] (G.N.A.); [email protected] (L.B.) * Correspondence: [email protected] (G.P.); [email protected] (G.P.); Tel.: +39-010-2896-884 (G.P.); +39-010-2896-493 (G.P.) † These authors contributed equally to this paper. Abstract: Brain-on-Chip (BoC) biotechnology is emerging as a promising tool for biomedical and pharmaceutical research applied to the neurosciences. At the convergence between lab-on-chip and cell biology, BoC couples in vitro three-dimensional brain-like systems to an engineered microfluidics platform designed to provide an in vivo-like extrinsic microenvironment with the aim of replicating tissue- or organ-level physiological functions. BoC therefore offers the advantage of an in vitro repro- duction of brain structures that is more faithful to the native correlate than what is obtained with conventional cell culture techniques. -

Electrophysiology Study
Electrophysiology (EP) Study Highly trained specialists perform EP studies in a specially designed EP lab outfitted with advanced technology and equipment. Why an EP study? The Value of an EP Study While electrocardiograms (ECGs An electrophysiology, or EP, study or EKGs) are important tests of the provides information that is key to heart’s electrical system, they diagnosing and treating arrhythmias. provide only a brief snapshot of Although it is more invasive than an the heart’s electrical activity. electrocardiogram (ECG) or echocar - Arrhythmias can be unpredictable diogram, and involves provoking and intermittent, which makes it arrhythmias, the test produces data unlikely that an electrocardiogram that makes it possible to : will capture the underlying electri - Normally, electricity flows through - cal pathway problem. Even tests • Diagnose the source of arrhythmia out the heart in a regular, meas - that stretch over longer time periods , symptoms such as Holter monitoring, may not ured pattern. This electrical system • Evaluate the effectiveness of capture an event. brings about coordinated heart certain medications in controlling muscle contractions. A problem During an EP study, a specially the heart rhythm disorder anywhere along the electrical trained cardiac specialist may pro - • Predict the risk of a future cardiac pathway causes an arrhythmia, voke arrhythmia events and collect event, such as Sudden Cardiac or heart rhythm disturbance. By data about the flow of electricity Death accurately diagnosing the precise during actual events. As a result, cause of an arrhythmia, it is possi - • Assess the need for an implantable EP studies can diagnose the ble to select the best possible device (a pacemaker or ICD) or cause and precise location of the treatment. -

Molecular Mechanisms of Mechanoperception in Plants Gabriele B
Washington University in St. Louis Washington University Open Scholarship Biology Faculty Publications & Presentations Biology 8-2013 A force of nature: molecular mechanisms of mechanoperception in plants Gabriele B. Monshausen Pennsylvania State University - Main Campus Elizabeth S. Haswell Washington University in St Louis, [email protected] Follow this and additional works at: https://openscholarship.wustl.edu/bio_facpubs Part of the Biology Commons, Biophysics Commons, Cell Biology Commons, and the Plant Sciences Commons Recommended Citation Monshausen, Gabriele B. and Haswell, Elizabeth S., "A force of nature: molecular mechanisms of mechanoperception in plants" (2013). Biology Faculty Publications & Presentations. 38. https://openscholarship.wustl.edu/bio_facpubs/38 This Article is brought to you for free and open access by the Biology at Washington University Open Scholarship. It has been accepted for inclusion in Biology Faculty Publications & Presentations by an authorized administrator of Washington University Open Scholarship. For more information, please contact [email protected]. A Force of Nature: Molecular Mechanisms of Mechanoperception in Plants Elizabeth S. Haswell1 and Gabriele B. Monshausen2 1Department of Biology, Washington University in St. Louis, St. Louis, MO 63130, USA 2Biology Department, Pennsylvania State University, University Park, Pa 16802, USA To whom correspondence should be addressed: [email protected]; [email protected] Abstract The ability to sense and respond to a wide variety of mechanical stimuli—gravity, touch, osmotic pressure, or the resistance of the cell wall—is a critical feature of every plant cell, whether or not it is specialized for mechanotransduction. Mechanoperceptive events are an essential part of plant life, required for normal growth and development at the cell, tissue and whole-plant level and for the proper response to an array of biotic and abiotic stresses. -

A Single-Neuron: Current Trends and Future Prospects
cells Review A Single-Neuron: Current Trends and Future Prospects Pallavi Gupta 1, Nandhini Balasubramaniam 1, Hwan-You Chang 2, Fan-Gang Tseng 3 and Tuhin Subhra Santra 1,* 1 Department of Engineering Design, Indian Institute of Technology Madras, Tamil Nadu 600036, India; [email protected] (P.G.); [email protected] (N.B.) 2 Department of Medical Science, National Tsing Hua University, Hsinchu 30013, Taiwan; [email protected] 3 Department of Engineering and System Science, National Tsing Hua University, Hsinchu 30013, Taiwan; [email protected] * Correspondence: [email protected] or [email protected]; Tel.: +91-044-2257-4747 Received: 29 April 2020; Accepted: 19 June 2020; Published: 23 June 2020 Abstract: The brain is an intricate network with complex organizational principles facilitating a concerted communication between single-neurons, distinct neuron populations, and remote brain areas. The communication, technically referred to as connectivity, between single-neurons, is the center of many investigations aimed at elucidating pathophysiology, anatomical differences, and structural and functional features. In comparison with bulk analysis, single-neuron analysis can provide precise information about neurons or even sub-neuron level electrophysiology, anatomical differences, pathophysiology, structural and functional features, in addition to their communications with other neurons, and can promote essential information to understand the brain and its activity. This review highlights various single-neuron models and their behaviors, followed by different analysis methods. Again, to elucidate cellular dynamics in terms of electrophysiology at the single-neuron level, we emphasize in detail the role of single-neuron mapping and electrophysiological recording. We also elaborate on the recent development of single-neuron isolation, manipulation, and therapeutic progress using advanced micro/nanofluidic devices, as well as microinjection, electroporation, microelectrode array, optical transfection, optogenetic techniques. -

Nitric Oxide Resets Kisspeptin-Excited Gnrh Neurons Via PIP2 Replenishment
Nitric oxide resets kisspeptin-excited GnRH neurons via PIP2 replenishment Stephanie Constantina, Daniel Reynoldsa, Andrew Oha, Katherine Pizanoa, and Susan Wraya,1 aCellular and Developmental Neurobiology Section, National Institute of Neurological Disorders and Stroke (NINDS), NIH, Bethesda, MD 20892 Edited by Solomon H. Snyder, Johns Hopkins University School of Medicine, Baltimore, MD, and approved November 23, 2020 (received for review June 15, 2020) 2+ Fertility relies upon pulsatile release of gonadotropin-releasing rate (20). Under normal conditions, [Ca ]i oscillations are driven hormone (GnRH) that drives pulsatile luteinizing hormone secre- by bursts of action potentials (AP) (21, 22). Yet, AP are not 2+ tion. Kisspeptin (KP) neurons in the arcuate nucleus are at the necessary for the KP-evoked [Ca ]i response to occur, as it is center of the GnRH pulse generation and the steroid feedback driven by multiple effectors including transient receptor potential- control of GnRH secretion. However, KP evokes a long-lasting re- canonical channels (TRPC), voltage-gated calcium channels sponse in GnRH neurons that is hard to reconcile with periodic (VGCC), and inositol 1,4,5-trisphosphate receptors (InsP3R) (15, GnRH activity required to drive GnRH pulses. Using calcium imag- 16, 19, 23). Thus, the versatility of Kiss1r signaling pathway un- ing, we show that 1) the tetrodotoxin-insensitive calcium response derlies the functionality of KP projections along GnRH neuron evoked by KP relies upon the ongoing activity of canonical tran- processes (24), with KP locally applied on nerve terminals also 2+ sient receptor potential channels maintaining voltage-gated evoking a long-lasting increase in [Ca ]i (16). -

Journal Pre-Proof Guidance for Cardiac Electrophysiology During
Journal Pre-proof Guidance for Cardiac Electrophysiology During the Coronavirus (COVID-19) Pandemic from the Heart Rhythm Society COVID-19 Task Force; Electrophysiology Section of the American College of Cardiology; and the Electrocardiography and Arrhythmias Committee of the Council on Clinical Cardiology, American Heart Association Dhanunjaya R. Lakkireddy, Mina K. Chung, Rakesh Gopinathannair, Kristen K. Patton, Ty J. Gluckman, Mohit Turagam, Jim Cheung, Parin Patel, Juan Sotomonte, Rachel Lampert, Janet K. Han, Bharath Rajagopalan, Lee Eckhardt, Jose Joglar, Kristin Sandau, Brian Olshansky, Elaine Wan, Peter A. Noseworthy, Miguel Leal, Elizabeth Kaufman, Alejandra Gutierrez, Joseph M. Marine, Paul J. Wang, Andrea M. Russo Please cite this article as: Dhanunjaya R. Lakkireddy, Mina K. Chung, Rakesh Gopinathannair, et al, Guidance for Cardiac Electrophysiology During the Coronavirus (COVID-19) Pandemic from the Heart Rhythm Society COVID-19 Task Force; Electrophysiology Section of the American College of Cardiology; and the Electrocardiography and Arrhythmias Committee of the Council on Clinical Cardiology, American Heart Association, Heart Rhythm (2020), [doi] This is a PDF file of an article that has undergone enhancements after acceptance, such as the addition of a cover page and metadata, and formatting for readability, but it is not yet the definitive version of record. This version will undergo additional copyediting, typesetting and review before it is published in its final form, but we are providing this version to give early -
ELECTROPHYSIOLOGY of the NEURON an Interactive Tutorial
ELECTROPHYSIOLOGY OF THE NEURON An Interactive Tutorial JOHN HUGUENARD DAVID A. MCCORMICK A Companion to Neurobiology by Gordon Shepherd New York Oxford OXFORD UNIVERSITY PRESS 1994 Oxford University Press Oxford New York Toronto Delhi Bombay Calcutta Madras Karachi Kuala Lumpur Singapore Hong Kong Tokyo Nairobi Dar es Salaam Cape Town Melbourne Auckland Madrid and associated companies in Berlin Ibadan Copyright © 1994 by Oxford University Press, Inc. Published by Oxford University Press, Inc., 198 Madison Avenue, New York, New York 10016-4314 Oxford is a registered trademark of Oxford University Press All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior permission of Oxford University Press. Library of Congress Cataloging-in-Publication Data Huguenard, John. Electrophysiolqgy of the neuron : an interactive tutorial / John Huguenard and David A. McCormick. p. cm. Companion to: Neurobiology by Gordon Shepherd. Includes bibliographical references. ISBN 0-19-509167-1 1. Neurophysiology—Computer simulation—Laboratory manuals. 2. Neurons—Computer simulation—Laboratory manuals. 3. Electrophysiology—Computer simulation—Laboratory manuals. I. McCormick, David. II. Shepherd, Gordon M., 1933—Neurobiology. in. Title. QP357.H84 1994 612.8—dc20 94-6530 35798642 Printed in the United States of America on acid-free paper Contents Introduction 3 Installation 4 Using a Computer to Perform -

In Vivo Electrophysiology of Peptidergic Neurons In
International Journal of Molecular Sciences Article In Vivo Electrophysiology of Peptidergic Neurons in Deep Layers of the Lumbar Spinal Cord after Optogenetic Stimulation of Hypothalamic Paraventricular Oxytocin Neurons in Rats Daisuke Uta 1,*,†, Takumi Oti 2,3,† , Tatsuya Sakamoto 3 and Hirotaka Sakamoto 3,* 1 Department of Applied Pharmacology, Faculty of Pharmaceutical Sciences, University of Toyama, Toyama 930-0194, Japan 2 Department of Biological Sciences, Faculty of Science, Kanagawa University, Hiratsuka, Kanagawa 259-1293, Japan; [email protected] 3 Ushimado Marine Institute (UMI), Graduate School of Natural Science and Technology, Okayama University, Ushimado, Setouchi, Okayama 701-4303, Japan; [email protected] * Correspondence: [email protected] (D.U.); [email protected] (H.S.); Tel.: +81-76-434-7513 (D.U.); +81-869-34-5210 (H.S.) † Authors with equal contributions. Abstract: The spinal ejaculation generator (SEG) is located in the central gray (lamina X) of the rat lumbar spinal cord and plays a pivotal role in the ejaculatory reflex. We recently reported that SEG neurons express the oxytocin receptor and are activated by oxytocin projections from the paraventricular nucleus of hypothalamus (PVH). However, it is unknown whether the SEG responds Citation: Uta, D.; Oti, T.; Sakamoto, T.; to oxytocin in vivo. In this study, we analyzed the characteristics of the brain–spinal cord neural Sakamoto, H. In Vivo Electrophysiology circuit that controls male sexual function using a newly developed in vivo electrophysiological of Peptidergic Neurons in Deep Layers technique. Optogenetic stimulation of the PVH of rats expressing channel rhodopsin under the of the Lumbar Spinal Cord after oxytocin receptor promoter increased the spontaneous firing of most lamina X SEG neurons. -

Electrophysiology Studies (EPS) Patient Information
Electrophysiology Studies (EPS) Patient Information Promoting better understanding, diagnosis, treatment and quality of life for those aff ected by heart rhythm disorders (cardiac arrhythmias) www.heartrhythmcharity.org.uk Registered Charity No. 1107496 Glossary Atria The two upper chambers of the heart. Contents AV node Part of the electrical pathway located Why do I need an between the atria and the ventricles. electrophysiology study? Catheter ablation The use of catheters to deliver energy into the heart to destroy abnormal tissues How does the heart that may lead to arrhythmias. work normally? Ectopic beat These are extra beats arising from the What can happen atria or ventricles. if there is an abnormality in the Electrophysiologist A cardiologist who has electrical system of specialised in the electrical side of the heart, my heart? meaning the heart’s rhythm. What does the SVT Supra ventricular tachycardia is an abnormal procedure involve? heart rhythm. What are the Ventricles The two lower chambers of the heart. benefi ts and risks The right ventricle pumps blood to the lungs and the associated with the left ventricle pumps blood around the body. electrophysiology study? How long will I have to stay in hospital? Important Information This booklet is intended for use by people who wish to understand more about electrophysiology studies. The information comes from research and previous patients’ experiences and should be used in addition to the information given to you by your doctors,nurses and physiologists. 2 Why do I need an electrophysiology study? An electrophysiology study is a procedure The heart and conducted by a heart rhythm cardiologist normal conduction (electrophysiologist) in a hospital. -

Clinical Cardiac Electrophysiology (EP-1) Rotation Director: Dr
Rotation: Clinical Cardiac Electrophysiology (EP-1) Rotation Director: Dr. Sunil Sinha Faculty: Drs. Sinha, Berger, Calkins, Halperin, Henrikson, Marine, and Tomaselli Rotation Hours: Mon - Fri, 7:30 am to 6 pm; 1 weekend per month on pager coverage. A. Electrophysiology, Pacing, and Arrhythmia: Patient Care (see attached “Legend for Learning Activities” for key to learning activities) Learning Evaluation Principal Educational Goals Activities Methods 1. Ability to obtain a complete medical history, perform a careful and accurate DPC, AR AE examination with emphasis on the cardiac exam, and review charts and pertinent records. 2. Ability to write a concise evaluation, assess the cardiovascular risk of the patient DPC, AR, AE and make therapeutic decisions and proper interventions based on patient CAC, EC, preferences, scientific evidence, and sound clinical judgment. ECG, DSP, MC, FS 3. Effectively evaluate and manage patients with complex cardiac arrhythmia. DPC, AR, AE EP,FS, HR, DSP, CC 4. Ability to risk stratify patients after being evaluated by EP study. EP, ECG, IL, AE CC 5. Ability to manage patients who have had arrhythmic disorder. DPC, EP, IL, AE, DSP CC, FS 6. Effectively direct the team performing CPR and advance cardiac life support. DPC, EP, IL, AE CC 7. Ability to manage complications from device implantation. DPC, FS, EP, AE CC 8. Ability to understand EP study and perform pacemaker implantation. DPC, AR, AE EP, IL, CC 9. Participation in the interpretation of ECG, 24-hour Holter. DPC, FS, AE, PR ECG 10. Participation in all pacemaker and ICD follow-up and programming using the DPC, FS, EP AE, DSP proper technique and under the supervision of a teaching faculty.