DYNAMIC ANALYSIS of the CUTTING FORCES in GEAR HOBBING Ali M. Abood, Bsc
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

&\S(1712; 2/Hi-4. 2
Nov. 25, 1924. E. R., FELLOWS 1,516,524 GEAR GENERATING CUTTING MACHINE Original Filed Aug. 29, 1918 4 sheets-Sheet 1 S. : O 3.É SS E. ,NSS lat o GS: &\s(1712; s A. Z72 (ve aeoz, Zézzzzz v 72 A.2deavs 2/hi-4. 2.-- Nov. 25, 924. E. R. Fellows 1,516,524. GEAR GENERATING CUTTING MACHINE 4 Sheets-Sheet 2. Noy. 25, 1924. 1,516 y 524 E. R. FELLOWS GEAR GENERATING CUTTING MACHINE Original Filled Aug. 29, 1918 4. Sheets-Sheet 3 2 22Z. 2 eas 2 2 UraC 2 S. s es Z2Zove) Z2 Zézeous - y43-24,A/rye, Nov. 25, 1924. E. R. FELLOWS 1,516,524 y - S S rt CyN s l Sl8 lsSS NS N S/T s ) Zazzo- ZZeizvezoz7.(7.7%is S 27.4 (3-417.'77 elegas Patented Nov. 25, 1924. 516,524 UNITED STATES PATENT OFFICE EDWIN, R., FELLOWS, OF SPRING FIELD, WERIYCNT, ASSIGNOR, TO THE FELLOWS GEAR, SHAPER, COWIPANY, OF SPRING-FIELD, VERTEOINT, A. CORPORATION OF VERVIONT. GEAR GENERATING CUTTING INACHINE. Application filed August 29, 1918, Serial No. 251,902. Renewed April 19, 1924. To all whom it may concern. takes place. This relative movement is the 55 Be it known that, I, EDWIN, R. FELLOWs, resultant of combined movements of rota a citizen of the United States, residing at tion and translation, and may be produced Springfield, in the county of Windsor and in any of three ways, that is; first, by giv 5 State of Vermont, have invented new and ing both movements to the gear, in which useful inprovements in Gear Generating Case the resultant motion is the same as 60 Cutting Machines, of which the following is though the gear were rolled on its base cyl 3. -
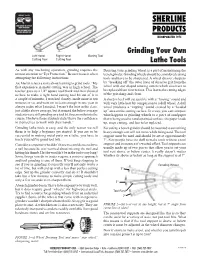
Grinding Your Own Lathe Tools
WEAR YOUR SAFETY GLASSES FORESIGHT IS BETTER THAN NO SIGHT READ INSTRUCTIONS BEFORE OPERATING Grinding Your Own Left Hand Right Hand Boring Tool Cutting Tool Cutting Tool Lathe Tools As with any machining operation, grinding requires the Dressing your grinding wheel is a part of maintaining the utmost attention to “Eye Protection.” Be sure to use it when bench grinder. Grinding wheels should be considered cutting attempting the following instructions. tools and have to be sharpened. A wheel dresser sharpens Joe Martin relates a story about learning to grind tools. “My by “breaking off” the outer layer of abrasive grit from the first experience in metal cutting was in high school. The wheel with star shaped rotating cutters which also have to teacher gave us a 1/4" square tool blank and then showed be replaced from time to time. This leaves the cutting edges us how to make a right hand cutting tool bit out of it in of the grit sharp and clean. a couple of minutes. I watched closely, made mine in ten A sharp wheel will cut quickly with a “hissing” sound and minutes or so, and went on to learn enough in one year to with very little heat by comparison to a dull wheel. A dull always make what I needed. I wasn’t the best in the class, wheel produces a “rapping” sound created by a “loaded just a little above average, but it seemed the below average up” area on the cutting surface. In a way, you can compare students were still grinding on a tool bit three months into the what happens to grinding wheels to a piece of sandpaper course. -

Design of Continuously Variable Bicycle Transmission
Innovative Bicycle Drivetrain Design of continuously variable bicycle transmission Author: Jean Kolb Supervisor: Dr Eng. Slawomir Kedziora Chain drive with derailleur change mechanism . 98.5% efficiency . Relatively low weight . The most common drivetrain . Not innovative NuVinci CVT hub . Continuously variable ratio . Torque transmitted by traction . Ball planets change the contact angle Source: https://www.fallbrooktech.com/nuvinci-technology CVT hub by Hiroyuki Urabe . Used as reference for own design . Upstream planetary gear train and roller train . Estimated efficiency of 90% . Patented, but not developed CVT hub by Hiroyuki Urabe Pros Cons . Different and innovative . Relatively heavy weight . Continuously variable . Lower transmission efficiency . Enhanced e-bike engine . More complex than the efficiency comparable design from . Protected in hub enclosure “NuVinci” . Clean look Presentation and explanation of the developed design CVT hub Developed CVT hub Autodesk Fusion 360 unites every development step Cloud computing Developed CVT hub Developed CVT hub Upstream planetary gear train Input Output Sprocket Input Input torque on ring gear Fixed carrier Developed CVT hub Planetary roller train Output Input Input torque on sun roller Non-rotatable but on axle displaceable carrier Preloaded spring Preloaded spring to guarantee enough traction Wave spring Preloaded spring Spline Radial bearing on slidable sleeve Needle bearings Axial bearing gets pushed Left handed thread Gap between roller and sun Left handed thread Changing -

Gear Cutting and Grinding Machines and Precision Cutting Tools Developed for Gear Manufacturing for Automobile Transmissions
Gear Cutting and Grinding Machines and Precision Cutting Tools Developed for Gear Manufacturing for Automobile Transmissions MASAKAZU NABEKURA*1 MICHIAKI HASHITANI*1 YUKIHISA NISHIMURA*1 MASAKATSU FUJITA*1 YOSHIKOTO YANASE*1 MASANOBU MISAKI*1 It is a never-ending theme for motorcycle and automobile manufacturers, for whom the Machine Tool Division of Mitsubishi Heavy Industries, Ltd. (MHI) manufactures and delivers gear cutting machines, gear grinding machines and precision cutting tools, to strive for high precision, low cost transmission gears. This paper reports the recent trends in the automobile industry while describing how MHI has been dealing with their needs as a manufacturer of the machines and cutting tools for gear production. process before heat treatment. A gear shaping machine, 1. Gear production process however, processes workpieces such as stepped gears and Figure 1 shows a cut-away example of an automobile internal gears that a gear hobbing machine is unable to transmission. Figure 2 is a schematic of the conven- process. Since they employ a generating process by a tional, general production processes for transmission specific number of cutting edges, several tens of microns gears. The diagram does not show processes such as of tool marks remain on the gear flanks, which in turn machining keyways and oil holes and press-fitting bushes causes vibration and noise. To cope with this issue, a that are not directly relevant to gear processing. Nor- gear shaving process improves the gear flank roughness mally, a gear hobbing machine is responsible for the and finishes the gear tooth profile to a precision of mi- crons while anticipating how the heat treatment will strain the tooth profile and tooth trace. -

Lathe Tooling Guide
LATHE TOOLING GUIDE A reference guide to understanding how cutting tools work and which inserts they pair with. ©Tormach® 2021. All rights reserved. Specifications subject to change without notice. DS10524_Lathe_Tooling_0921B TORMACH.COM Tormach® CNC Lathe Tooling REFERENCE GUIDE To make the most of a machine purchase, it’s important to understand how cutting tools work and which inserts they pair with. Here is some background on lathe cutting tool and insert terminology: ISO/ANSI Inserts Like metric and imperial measurements standards, the U.S. has its own tool TABLE OF insert classification system; they are called American National Standards Institute (ANSI) designations. All of these ANSI classifications can be converted CONTENTS to the International Organization for Standardization (ISO) classifications, but this guide includes both for easier selection. Cutting Tool Designations 3 Turning Tools Cutting tools are easily identified by their designation, which is universal between ISO and ANSI, and, in the machine shop, tool slang often refers to 6 Boring Bars the insert shape, which is also available in the tool designation. Examples and explanations of designations are available at the start of each section. 7 Turning/ Boring Right-Hand vs. Left-Hand vs. Neutral Inserts Right-hand tools are the most commonly used, because they can be used for most turning applications, including making shoulders on the front of the workpiece. Left-handed tools are typically chosen for back turning and making 11 Grooving/ Parting sharp shoulders on the back of the workpiece. Neutral tools are ideal for Tools complex profiling, thanks to their narrow tips. Insert Shapes 12 Grooving/ Parting There are a variety of insert shapes available, but the general note is use Tool Inserts wider inserts for simple geometry and roughing passes, since they have more durability than a more narrow cutting tool, which is needed for complicated or 12 Threading Tools intricate parts. -
Intelligent Process Optimization „Innovation Is Our Future.“ Sascha Tschiggfrei, CEO the Future Has Begun
Intelligent Process Optimization „Innovation is our future.“ Sascha Tschiggfrei, CEO The Future has begun As a global market leader, we manufacture technologically advanced high precision tool holders for turning centers and swiss type lathes that are known for high performance and long life-time. Using our new “smart” technology, our customers will be able to intelligently optimize and monitor their processes in the future. Intelligent Process State-of-the-art technology for maximum productivity. With this claim, WTO develops Optimization and produces superior precision tool holders in terms of technology and quality. Used intelligently, processes are optimized and production becomes more productive. WTO Driven Precision Tool Holders equipped with innovative „smart“ technology enable intelligent online process monitoring. “Consistent development - always one step ahead.” Karlheinz Jansen, CTO High Tech – Made in Germany From the technical design to the finished product we make no compromises when it comes to manufacturing our high precision tool holders. Permanent investment in state-of-the-art production technologies, high quality standards and a large manufacturing depth. Our products are in use worldwide, wherever precision parts are manufactured on turning centers with high productivity. „Our employees don‘t work for WTO. They work for the success of our customers.“ Daniel Sierra, Sales Director WTO Your Success is our Business Motivated employees are the basis for 100 % consistent customer focus. WTO offers its employees a state-of-the-art working environ- ment to work independently and ensures highly motivated employees in a family-owned technology company. To a large extent, WTO relies on its own highly qualified employees in order to achieve high quality standards. -

Gear Cutting Solutions
Gear cuttingsolutions 2 E2F Z TRINITY ORIGIN SWISS MADE SWISS 8100 DUPLEX REVOLUTION 8700 Gear cutting solutions Type Name of tool Standard modules* Tool Tool Machined part Page Tooth by tooth m 0.03 - 1.00 5 gear cutter Z² m 0.015 - 1.000 6 Hobs for epicyclic & involute teeth ORIGIN m 0.015 - 0.800 7 m 0.015 - 1.000 8 Two-way hob cutter m 0.015 - 0.800 9 ORIGIN DUPLEX *Depends on the gearing norm Other modules upon request swiss made Gear cutting solutions Type Name of tool Standard modules* Tool Tool Machined part Page Hobs for asymmetrical 10 gears and special by profi le profi les REVOLUTION Hobs for frontal F 2 m 0.05 - 0.50 11 gear cutting E Hobs for conical m 0.05 - 0.30 12 gears TRINITY Hob cutters for involute gears ISO53 / DIN867 m 0.05 - 1.00 13 DIN quality AAAA 8100 Skiving cutter for m 0.05 - 1.00 internal gear teeth 14 8700 *Depends on the gearing norm Other modules upon request swiss made DUPLEX ORIGIN Hobs for epicyclic New & involute teeth Hobbing with two hob cutters is known to produce burr-free hobbing. It is a functional process, but requires a sometimes tedious start-up. It is necessary to make an adjustment for each hob, and the stacking of the arbor, tools and spacers results in a bad roundness and warping. Louis Bélet SA has found a simple solution that can be used by everyone to solve these problems: ORIGIN DUPLEX hobs. ORIGIN DUPLEX on a shank Circular ORIGIN DUPLEX Made of one-piece solid carbide, these cutters have two cutting areas, one on the right and one on the left. -

Introduction to Turning Tools and Their Application Identification and Application of Cutting Tools for Turning
Introduction to Turning Tools and their Application Identification and application of cutting tools for turning The variety of cutting tools available for modern CNC turning centers makes it imperative for machine operators to be familiar with different tool geometries and how they are applied to common turning processes. This course curriculum contains 16-hours of material for instructors to get their students ready to identify different types of turning tools and their uses. ©2016 MachiningCloud, Inc. All rights reserved. Table of Contents Introduction .................................................................................................................................... 2 Audience ..................................................................................................................................... 2 Purpose ....................................................................................................................................... 2 Lesson Objectives ........................................................................................................................ 2 Anatomy of a turning tool............................................................................................................... 3 Standard Inserts .............................................................................................................................. 3 ANSI Insert Designations ............................................................................................................. 3 Insert Materials -

Industrial Productivity Training Manual
INDUSTRIAL PRODUCTIVITY TRAINING MANUAL Version 2.0 Written by: Dr. Michael R. Muller - Director, Don Kasten ©2006 Rutgers, the State University of New Jersey Table of Contents INTRODUCTION..............................................................................2 PRODUCTIVITY TOOLBOX ..............................................................5 Toolbox Introduction.....................................................................6 Productivity Metrics......................................................................9 Cost of Labor..............................................................................10 Space Optimization .......................................................................11 Productivity Questions...................................................................14 CONCEPTS FOR PRODUCTIVITY ENHANCEMENT, PART I INCREASING PIECES/PERSON/HOUR .............................................19 QUICK CHANGES......................................................................20 AR No. 1 Decrease Die Change-Out & Start-Up Times...................26 AR No. 2 Use Fixtures to Reduce Lathe Set-up Times....................32 AR No. 3 Install a Rotating Nozzle Carousel to Reduce Set-Up Times.34 AR No. 4 Employ Modular Jigs to Reduce Process Set-up Times.......36 BOTTLENECK MITIGATION.........................................................39 AR No. 5 Add Machine Operators to Reduce Production Bottleneck....41 AR No. 6 Install Refrigeration System to Cool Product...................45 AR No. 7 Replace Old Lathe -

Ring Gear and Pinion Tooth Pattern Interpretation
RING GEAR AND PINION TOOTH PATTERN INTERPRETATION The final pinion position will be verified by using the GEAR CONTACT PATTERN METHOD described as follows: The TOE of the gear is the portion of the tooth surface at the end towards the center. The HEEL of the gear tooth is the portion of the tooth surface at the outer-end. The TOP LAND of a gear tooth is the surface of the top of the tooth. Every gear has a characteristic pattern. RING GEAR TOOTH PROFILE There are two types of gears which are determined by the machining method. One is manufactured by FACE HOBBING, while the other one is manufactured by FACE MILLING. You must first determine the type of gear that you have in order to know which gear pattern chart to use as described in this bulletin. To do this, notice the depth of the ring gear tooth - dimension "A" and "B". If the gear was manufactured using the FACE HOBBING method, both "A" and "B" will be of equal depth. If the gear was manufactured using the FACE MILLING method, "A" will be larger than "B". Once the type of ring gear machining method has been identified, refer to the proper gear pattern chart. FACE HOBBING FACE MILLING NOTE: WHEN MAKING CHANGES, NOTE THAT TWO VARIABLES ARE INVOLVED. EXAMPLE: IF YOU HAVE THE BACKLASH SET CORRECTLY TO THE SPECIFICATION AND YOU CHANGE THE PINION POSITION SHIM, YOU MAY HAVE TO READJUST THE BACKLASH TO THE CORRECT SPECIFICATION BEFORE CHECKING THE PATTERN. REFER TO PATTERN INTERPRETATION. BULLETIN 5717-A 5/02 1 of 3 Spicer Technology, Inc. -

Basic Gear Systems
Basic Gear Systems A number of gears connected together is called a “Gear Train”. The gear train is another mechanism for transmitting rotary motion and torque. Unlike a belt and pulley, or chain and sprocket, no linking device (belt or chain) is required. Gears have teeth which interlock (or mesh) directly with one another. Advantages The main advantages of gear train transmission systems are that because the teeth on any gear intermesh with the next gear in the train, the gears can't slip. (An exact ratio is maintained.) Large forces can be transmitted. The number of turns a gear makes can be easily controlled. High ratios between the input and the output are easily possible. Disadvantages The main disadvantage of a gear system is it usually needs a lubrication system to reduce wear to the teeth. Oil or grease is used to reduce friction and heat caused by the teeth rubbing together. Gear systems to increase and decrease rotational velocity Gears are used to increase or decrease the speed or power of rotary motion. The measure of how much the speed or power is changed by a gear train is called the gear ratio (velocity ratio). This is equal to the number of teeth on the driver gear divided by the number of teeth on the driven gear. To decrease the speed of the output the driver gear is smaller than the driven gear. (This will reduce the speed but increase the “torque”.) This diagram shows a small gear (A) driving a larger gear (B). Because there are more teeth on the driven gear there is a reduction in output speed. -

Auto-Meshing Rack and Pinion Gear
Technical Disclosure Commons Defensive Publications Series April 2020 AUTO-MESHING RACK AND PINION GEAR HP INC Follow this and additional works at: https://www.tdcommons.org/dpubs_series Recommended Citation INC, HP, "AUTO-MESHING RACK AND PINION GEAR", Technical Disclosure Commons, (April 10, 2020) https://www.tdcommons.org/dpubs_series/3120 This work is licensed under a Creative Commons Attribution 4.0 License. This Article is brought to you for free and open access by Technical Disclosure Commons. It has been accepted for inclusion in Defensive Publications Series by an authorized administrator of Technical Disclosure Commons. INC: AUTO-MESHING RACK AND PINION GEAR Auto‐meshing rack and pinion gear In a mechanical system with a rack and pinion, typically the rack and pinion are always engaged with each other but, in some instances, it is necessary to have the pinion gear disengage and engage with the rack. When this happens, the rack and gear need to mesh properly each time that they engage. If the gears do not properly mesh, then the system can lockup, gears can break, or other similar problems occur. One example of this is in a large format printer with a user replaceable printhead cleaner. A rack can be permanently placed in the printer (Figure 1), and then the printhead cleaner contain moving parts driven by the rack. The moving parts could be caps, spitrollers, webwipes, etc. An example of gears locking is shown in Figure 2. Figure 1 ‐ Printer printhead cleaner station with rack Pinion gear Rack gear Figure 2 ‐ Printhead cleaner with pinion gear locking up with rack Published by Technical Disclosure Commons, 2020 2 Defensive Publications Series, Art.