Asi Activities in Cergop Ii Framework: Discussion of the Results
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Avigliano-Venosa Acerenza•Lavello•Pignola
Avigliano-Venosa Acerenza•Lavello•Pignola Domenica 16 marzo 2008 38 L’INDAGINE Av i g l i a n o La rilevazione è stata curata dall’Adoc Dove si spende meglio AVIGLIANO - Pasqua si avvicina e scatta la commerciali monitorate sono state 6 per un corsa all'acquisto dei prodotti che la tradi- totale di 75 prodotti. L'indagine ha messo zione vuole siano associati a questa festa. in evidenza consistenti variazioni di prezzo Ma come regolarsi nella giungla dei prezzi, a seconda del negozio nel quale si effettua sempre più caratterizzati da aumenti spro- l'acquisto. Si parte del pane di grano duro, positati? L'Adoc di Basilicata, che in passa- che va dai 2,50 euro di Man. & Servizi (Vallo to ha condotto analisi di questo genere nel- Uno) a 1,80 di Alimentari Iannelli. Ancora, la città capoluogo, ha esteso la propria ana- un litro di latte Parmalat costa 1,36 al Pick lisi anche alla città di Avigliano, «nello spi- Up, e 1 euro da Ecco. Il grano per la pastiera rito di servizio ai consumatori - precisa l'as- varia dai 60 centesimi dell'Alimentari Ga- sociazione dei consumatori - che caratteriz- lasso e del Pick Up, all'euro di Mns. & Ser- za il nostro lavoro quotidiano. Grazie ai vizi. Per la farina 00 si va dai 51 centesimi suoi collaboratori, l'Adoc ha cercato di for- di Ecco ai quattordici in più dell'Alimentari nire ai cittadini di Avigliano la “bussola” Iannelli. Per una spesa conveniente, quin- per districarsi nella difficilissima, costosis- di, la cosa migliore è orientarsi in base ai sima e complicatissima giungla dei prezzi prezzi dei singoli prodotti da acquistare. -

Forenza Venosa Filiano Maschito Acerenza
"Masseria Matinella - Veltri" MADDALENA O CATACOMBE TUFARELLO TUFARELLO TUFARELLO TUFARELLO LORETO TRINITA' TRINITA' "Ex Monastero di S. Agostino" TRINITA' "Castello" "Palazzo La Torre" "Palazzo La Torre" (Area di rispetto) MANGIAGUADAGNO MATINELLE "Masseria Santangelo" (Ex Casino Santangelo) "Masseria Santangelo" (Ex Casino Santangelo) "Masseria Rotondo" (ex Villa Rotonda) "Masseria Rotondo" (ex Villa Rotonda) VENOSA "Masseria di Giustino Fortunato" "Masseria di Giustino Fortunato" PEZZA DEL CILIEGIO CASALINI SOTTANA GINESTRA ! ! ! ! ! ! ! ! 4 ! 4! ! ! ! ! ! ! ! 4! ! ! ! 4! ! ! ! ! 4! ! MASCHITO ! ! Legenda 4! Chiesa di San Donato ! "Convento San Donato e Villa Comunale ex giardino botanico" ! ! !! ! ! ! ! ! #* ! Aerogeneratori in progetto (WTG) ! ! ! ! ! 4! ! ! ! ! ! ! ! ! ! ! ! 4! ! ! ! ! ! ! ! ! "Palazzo Nardozza" "Palazzo Colombo" 4! ! ! ! ! ! ! ! ! 4! ! ! Aerogeneratori esistenti da dismettere ! ! ! ! ! ! ! ! ! ! 4! ! ! ! ! ! ! ! 4 ! ! ! ! ! ! ! ! ! ! ! ! ! ! 4 ! 4 ! ! ! ! ! ! ! ! ! ! ! ! ! 4 ! ! ! !!! ! Aerogeneratori Maschito ! ! 4 ! ! ! ! ! ! ! ! ! ! ! ! !! ! !! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Cavidotti ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Stazione elettrica esistente ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Area vasta di studio ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !! ! ! ! ! Caratteri antropici ! ! ! ! ! ! ! ! ! ! ! ! !4 ! ! ! ! ! ! ! ! !! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !4 ! ! ! ! ! ! ! Centri abitati ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! 4! ! ! ! ! ! ! ! ! ! -
Orari Orari ISP20101103
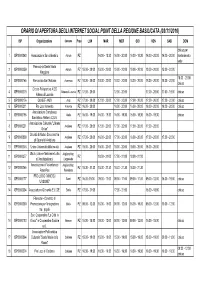
ORARIO DI APERTURA DEGLI INTERNET SOCIAL POINT DELLA REGIONE BASILICATA (03/11/2010) ISP Organizzazione Comune Prov LUN MAR MER GIO VEN SAB DOM chiuso per 1 ISP/0000363 Associazione San Valentino Abriola PZ 16:30 - 19:30 16:00 - 20:00 16:30 - 19:30 16:00 - 20:00 16:00 - 20.00 trasferimento sede Parrocchia Santa Maria 2 ISP/0000359 Abriola PZ 15:00 - 20:00 15:00 - 20:00 15:00 - 20:00 15:00 - 20:00 15:00 - 20:00 15:00 - 20:00 Maggiore 18:30 - 20:00 3 ISP/0000165 Parrocchia Sant'Antonio Acerenza PZ 18:30 - 20:00 18:30 - 20:00 18:30 - 20:00 18:30 - 20:00 18:30 - 20:00 18:30 - 20:00 chiuso Circolo Polisportivo AICS 4 ISP/0000070 Albano di Lucania PZ 17:00 - 20:00 17:00 - 20:00 17:00 - 20:00 17:00 - 19:00 chiuso Albano di Lucania 5 ISP/0000176 GIOSEF ANZI Anzi PZ 17:00 - 20.00 17:00 - 20.00 17:00 - 20.00 17:00 - 20.00 17:00 - 20.00 17:00 - 20.00 chiuso 6 ISP/0000211 Pro Loco Armento Armento PZ 16:00 - 20:00 16:00 - 20:00 16:00 - 20:00 16:00 - 20:00 16:00 - 20:00 chiuso Associazione Complesso 7 ISP/0000195 Atella PZ 16:00 - 19:30 16:00 - 19:30 16:00 - 19:30 16:00 - 19:30 16:00 - 19:30 chiuso Bandistico Atellano C.B.A. Associazione Culturale "L'abete 8 ISP/0000231 Avigliano PZ 17:00 - 20:00 17:00 - 20:00 17:00 - 20:00 17:00 - 20:00 17:00 - 20:00 Onlus" Società di Mutuo Soccorso fra 9 ISP/0000300 Avigliano PZ 17:00 - 20:00 16:00 - 20:00 17:00 - 20:00 16:00 - 20:00 17:00 - 20:00 17:00 - 20:00 gli Operai di Avigliano 10 ISP/0000046 Unitre Università delle tre età Avigliano PZ 18:00 - 20:00 18:00 - 20:00 18:00 - 20:00 18:00 - 20:00 18:00 - 20:00 UNLA (Unione Nazionale Lotta Avigliano fraz. -

Sistema Informativo Ministero Della Pubblica Istruzione
SISTEMA INFORMATIVO MINISTERO DELLA PUBBLICA ISTRUZIONE UFFICIO SCOLASTICO REGIONALE PER LA BASILICATA UFFICIO SCOLASTICO PROVINCIALE : POTENZA ELENCO DEI TRASFERIMENTI E PASSAGGI DEL PERSONALE DOCENTE DI RUOLO DELLA SCUOLA PRIMARIA ANNO SCOLASTICO 2009/10 ATTENZIONE: PER EFFETTO DELLA LEGGE SULLA PRIVACY QUESTA STAMPA NON CONTIENE ALCUNI DATI PERSONALI E SENSIBILI CHE CONCORRONO ALLA COSTITUZIONE DELLA STESSA. AGLI STESSI DATI GLI INTERESSATI O I CONTROINTERESSATI POTRANNO EVENTUALMENTE ACCEDERE SECONDO LE MODALITA' PREVISTE DALLA LEGGE SULLA TRASPARENZA DEGLI ATTI AMMINISTRATIVI. TRASFERIMENTI NELL'AMBITO DEL COMUNE - CLASSI COMUNI 1. BRIGANTE BENEDETTA . 12/11/67 (PZ) DA : PZCT71000P - C.T.P. EDA LAGONEGRO A : PZEE852012 - LAGONEGRO "PIAZZA REPUBBLICA" (LAGONEGRO) PUNTI 88 2. CAPPIELLO ADRIANA . 21/ 1/60 (PZ) DA : PZEE88202V - SCUOLA PRIMARIA "G. ALBINI" (POTENZA) A : PZEE88202V - SCUOLA PRIMARIA "G. ALBINI" (POTENZA) DA POSTO DI LINGUA :INGLESE PRECEDENZA: TRASFERITO NELL'AMBITO DELL'ORG. FUNZ. PUNTI 212 3. CASCINI EMANUELA ANNA . 1/ 1/60 (PZ) DA : PZEE87101B - AVIGLIANO FRAZ."LAGOPESOLE" (AVIGLIANO) A : PZEE00401N - AVIGLIANO SPAVENTA (AVIGLIANO) PRECEDENZA: EX PERDENTE POSTO NELLA SCUOLA PUNTI 42 4. CIRIGLIANO ANNA . 14/ 1/58 (PZ) DA : PZEE02101B - LAURIA SUPERIORE "MARCONI" (LAURIA) A : PZEE02101B - LAURIA SUPERIORE "MARCONI" (LAURIA) DA POSTO DI LINGUA :INGLESE PRECEDENZA: TRASFERITO NELL'AMBITO DELL'ORG. FUNZ. PUNTI 168 5. CRUDELE DANIELA . 31/10/68 (PZ) DA : PZEE88202V - SCUOLA PRIMARIA "G. ALBINI" (POTENZA) A : PZEE88202V - SCUOLA PRIMARIA "G. ALBINI" (POTENZA) DA POSTO DI LINGUA :INGLESE PRECEDENZA: TRASFERITO NELL'AMBITO DELL'ORG. FUNZ. PUNTI 72 6. D'ANZI SILVIA ANTONIA . 20/ 3/57 (PZ) DA : PZEE04101L - POTENZA "MERCURIO" (POTENZA) A : PZEE879012 - POTENZA "POGGIO TRE GALLI" (POTENZA) (SOPRANNUMERARIO TRASFERITO CON DOMANDA CONDIZIONATA) PUNTI 109 7. -

Unita' Di Direzione
AZIENDA TERRITORIALE PER L’EDILIZIA RESIDENZIALE DI POTENZA ______________________________________________________________________________________________________ UNITA’ DI DIREZIONE “INTERVENTI COSTRUTTIVI – MANUTENZIONE – RECUPERO – ESPROPRI” ACCORDO QUADRO TRIENNALE CON UN UNICO OPERATORE ECONOMICO ART. 54 COMMA 3 DEL D. LGS. 50/2016. LAVORI EDILI GENERALI DI MANUTENZIONE DA EFFETTUARSI SUL PATRIMONIO DELL’ATER, COMPRESO LE CONNESSE OPERE IMPIANTISTICHE TERMOIDRAULICHE, ELETTRICHE E DELL’ARTIGIANATO IN GENERE. AREE N° 1 – 2 – 3 – 4 – 5 – 6 IMPORTO GLOBALE DEL PROGRAMMA : € 3.900.000,00 – Lotti n. 6 2e CONSISTENZA PATRIMONIALE AREA 5 Il Responsabile del Procedimento: ing. Michele GERARDI Il Gruppo di Progettazione: geom. Antonio CARCASSA geom. Rocco LO BIANCO geom. Nicola LUCIA geom. Leonardo MONTANARO geom. Aldo NOTAR FRANCESCO geom. Mario RESTAINO __________________________________________________________________________________________________________________________________________________________________________ Via Manhes, 33 – 85100 – POTENZA – tel. 0971413111 – fax. 0971410493 – www.aterpotenza.it U.R.P. - Numero Verde – 800291622 – fax 0971 413227 AREA 5 COMUNE INDIRIZZO Locali ATER COD.FAB. Alloggi ATER Alloggi venduti 1225 177 ATELLA Via Potenza n.68/1 849 2 3 ATELLA Via Potenza 1044 3 1 ATELLA Via Potenza 1045 1 3 ATELLA Via Potenza 1046 4 ATELLA Via Potenza n.62/1 274 1 7 ATELLA Largo S.Eligio 10/5 431 7 2 ATELLA Largo S.Eligio 11/3 1185 6 ATELLA Via dei Tigli n.2-4 518 16 2 ATELLA Via dei Tigli 512 17 1 ATELLA Via dei Tigli n.3-5 546 14 AVIGLIANO Strada Villa Corbo n.12 756 2 20 AVIGLIANO Via Italia n.33 643 4 4 AVIGLIANO Via Risorgimento n.4 1188 3 3 AVIGLIANO Viale XVIII Agosto n.4-6 58 3 15 1 AVIGLIANO Via Porta Potenza n.2 54 4 9 AVIGLIANO Via John Kennedy n.3 328 6 2 AVIGLIANO Via John Kennedy n.1 5698 5 1 AVIGLIANO Via John Kennedy n.5 276 3 3 4 AVIGLIANO Via Risorgiemento n.20 277 6 2 AVIGLIANO Via G.Rossa n.15-17-19 382 20 1 1 AVIGLIANO Via G. -

WERESILIENT the PATH TOWARDS INCLUSIVE RESILIENCE The
UNISDR ROLE MODEL FOR INCLUSIVE RESILIENCE AND TERRITORIAL SAFETY 2015 #WERESILIENT COMMUNITY CHAMPION “KNOWLEDGE FOR LIFE” - IDDR2015 THE PATH TOWARDS INCLUSIVE RESILIENCE EU COVENANT OF MAYORS FOR CLIMATE AND The Province of Potenza experience ENERGY COORDINATOR 2016 CITY ALLIANCE BEST PRACTICE “BEYOND SDG11” 2018 K-SAFETY EXPO 2018 Experience Sharing Forum: Making Cities Sustainable and Resilient in Korea Incheon, 16th November 2018 Alessandro Attolico Executive Director, Territorial and Environment Services, Province of Potenza, Italy UNISDR Advocate & SFDRR Local Focal Point, UNISDR “Making Cities Resilient” Campaign [email protected] Area of interest REGION: Basilicata (580.000 inh) 2 Provinces: Potenza and Matera PROVINCE OF POTENZA: - AREA: 6.500 sqkm - POPULATION: 378.000 inh - POP. DENSITY: 60 inh/sqkm - MUNICIPALITIES: 100 - CAPITAL CITY: Potenza (67.000 inh) Alessandro Attolico, Province of Potenza, Italy Experience Sharing Forum: Making Cities Sustainable and Resilient in Korea Incheon, November 16th, 2018 • Area of interest Population (2013) Population 60.000 20.000 30.000 40.000 45.000 50.000 65.000 70.000 25.000 35.000 55.000 10.000 15.000 5.000 0 Potenza Melfi Lavello Rionero in Vulture Lauria Venosa distribution Avigliano Tito Senise Pignola Sant'Arcangelo Picerno Genzano di Lagonegro Muro Lucano Marsicovetere Bella Maratea Palazzo San Latronico Rapolla Marsico Nuovo Francavilla in Sinni Pietragalla Moliterno Brienza Atella Oppido Lucano Ruoti Rotonda Paterno Tolve San Fele Tramutola Viggianello -

All. 1 – Conferma Sede Docenti Di Sostegno – Secondaria Di II Grado
Allegato 1 USR Basilicata - AT Potenza Elenco dei docenti di sostegno che hanno ottenuto la titolarità in organico di diritto per l’a.s. 2016/17 presso la sede di attuale servizio. CODICE COMUNE DENOMINAZIONE SCUOLA Area Ore DOCENTI CONFERMATI N. SCUOLA 1 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD01 18 Buchicchio Rossana 2 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD01 18 Fortunato Anna Maria 3 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD01 18 Giorgio Rocco 4 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD03 18 Morrone Leonardo 5 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD01 18 Nardiello Rosa 6 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD04 18 Sanza Marilia 7 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD03 18 Satriano Anna 8 AVIGLIANO PZRA010045 I. P. AGR. E AMBIENTE "G. FORTUNATO" - AVIGLIANO AD03 18 Verrastro Lucia 9 BRIENZA PZTD024027 I.T. COMMERCIALE "I.T. ANTONIO FALCE" - BRIENZA AD04 18 Iallorenzi Angela 10 BRIENZA PZTD024027 I.T. COMMERCIALE "I.T. ANTONIO FALCE" - BRIENZA AD03 18 Lomuti Maria Luisa 11 GENZANO DI L. PZPS02901D L. SCIENTIFICO "E. MAIORANA" - GENZANO DI LUCANIA AD03 18 D'Agostino Giuseppe 12 GENZANO DI L. PZRA029013 I. P. AGR. E AMBIENTE "G. FORTUNATO" - GENZANO DI LUCANIA AD01 18 Cillo Francesco 13 GENZANO DI L. PZRA029013 I. P. AGR. E AMBIENTE "G. FORTUNATO" - GENZANO DI LUCANIA AD02 18 Giacomino Rosa Giuseppina 14 GENZANO DI L. PZRA029013 I. P. AGR. E AMBIENTE "G. -

TERRITORIALITA' DIFESA UFFICIO Allegato
Macroaree per il rispetto della territorialità nella designazione dei difensori di ufficio reperibili GRUPPO UNO – ZONA CENTRALE Paesi Giudici di Pace Acerenza ACERENZA Albano di Lucania AVIGLIANO Avigliano BELLA Balvano POTENZA Baragiano VIETRI DI POTENZA Bella 5 Brindisi Montagna Campomaggiore Cancellara Castelmezzano Filiano Genzano di Lucania Muro Lucano Oppido Lucano Picerno Pietragalla Pietrapertosa Pignola Potenza Ruoti San Chirico Nuovo Sant'Angelo le Fratte Satriano di Lucania Savoia di Lucania Tito Tolve Trivigno Vaglio Basilicata Vietri di Potenza 29 Macroaree per il rispetto della territorialità nella designazione dei difensori di ufficio reperibili GRUPPO DUE – ZONA NORD Paesi Giudici di Pace Atella MELFI Banzi PESCOPAGANO Barile VENOSA Castelgrande 3 Forenza Ginestra Lavello Maschito Melfi Montemilone Palazzo San Gervasio Pescopagano Rapolla Rapone Rionero in Vulture Ripacandida Ruvo del Monte San Fele Venosa 19 Macroaree per il rispetto della territorialità nella designazione dei difensori di ufficio reperibili GRUPPO TRE – ZONA SUD Paesi Giudici di Pace Abriola Giudice di Pace di CALVELLO Anzi Giudice di Pace di MARSICO NUOVO Armento Giudice di Pace di VIGGIANO Brienza 3 Calvello Corleto Perticara Grumento Nova Guardia Perticara Laurenzana Marsico Nuovo Marsicovetere Montemurro Paterno Sasso di Castalda Tramutola Viggiano 16 A partire dal prossimo trimestre ognuno di voi potrà decidere di essere disponibile in una o più delle macroaree di cui sopra. I difensori di ufficio potranno consultare, tramite la piattaforma RICONOSCO, già utilizzata per la formazione, dal menù a sinistra alla sezione DIFESE, il registro delle proprie date di nomina: inoltre, cliccando sul pulsante "Mostra i colleghi di turno" sarà possibile visualizzare le reperibilità dei Colleghi in turno, in modo da agevolare le operazioni di sostituzione. -

Dialetti E Artigianato Lucano
DIALETTI E ARTIGIANATO LUCANO I dialetti lucani sono le varietà linguistiche romanze del gruppo meridionale intermedio (noto anche come diasistema della lingua napoletana) parlate nella regione italiana della Basilicata (o Lucania, dal cui nome è tratto l'aggettivo "lucani"). Nel corso dei secoli la Lucania è stata conquistata e in parte colonizzata da diverse popolazioni straniere (il contributo più significativo e tutt'oggi visibile è quello dei Greci delle colonie, che coabitarono con l'indigena popolazione dei Lucani). Dopo la caduta dell'Impero romano e durante il Medioevo, alcuni popoli germanici si stabilirono nella regione, come ad esempio i Normanni), che hanno dato vita a parlate varie ed eterogenee. Per questa ragione, il dialetto lucano presenta delle evidenti diversità a seconda delle varie zone. Sebbene abbia caratteristiche proprie, questo dialetto presenta varie influenze provenienti dalle regioni limitrofe (Campania, Puglia, Calabria), che sono incorporate dalle zone situate nelle vicinanze di queste regioni. In linea generale, si può affermare che il dialetto di questa regione è suddiviso principalmente in quattro blocchi, a cui si aggiunge un dialetto alloglotto di origine extraromanza. I dialetti dell'area appenninica lucana sono quelli parlati nella zona centrale ed in quella occidentale della provincia di Potenza ed in diversi comuni dell'entroterra materano. Presentano una pronuncia di vocali generalmente chiuse e legami con quello campano. All'interno di quest'area, secondo alcuni studiosi, farebbero eccezione sei comuni tra cui lo stesso capoluogo di regione (oltre a Potenza, Pignola, Tito, Picerno, Trecchina, Vaglio di Basilicata) in cui si parlerebbero i dialetti gallo‐italici di Basilicata, a causa di una probabile immigrazione avvenuta in epoca medioevale di popolazioni provenienti dal Piemonte, ed in particolare dal Monferrato; conseguentemente a ciò la fonetica è molto differente con il resto dell'isola linguistica, anche se con il passare dei secoli si è verificato un processo di convergenza con i dialetti lucani circostanti. -

DGR 1393 28.12.2018 – Rimodulazione
“Linea Nuove Azioni – Aggiornamento Cronoprogrammi” ALLEGATO 1 CRONOPROGRAMMI APPROVATI CON D.G.R. N. 1320 DEL 6 DICEMBRE 2017 - CRONOPROGRAMMI AGGIORNATI RIFERIMENTI A DELIBERE DI RIFERIMENTI ACCORDO DI BENEFICIARIO/STRUTTURA UFFICIO REGIONALE COSTO COMPLESSIVO AMMISSIONE A CUP INTERVENTO/PROCEDURA PRIORITA' AZIONE CONTRIBUTO CONCESSO PAC PROGRAMMA/ATTI RESPONSABILE DELL’ATTUAZIONE RESPONSABILE INTERVENTO FINANZIAMENTO/MODIFICHE INTEGRATIVI SCHEDE CONCLUSIONE/ CONCLUSIONE/ DURATA IGV DURATA DELL'ACCORDO IGV OPERATIVA OPERATIVA INTERVENTO DELL'ACCORDO INTERVENTO PROGETTO PER LA REALIZZAZIONE DI ATLANTE E63C16000160002 AGENDA DIGITALE SISTEMI INFORMATIVI E ICT IRCSS CROB RIONERO Ufficio Finanze del SSR 236.000,00 236.000,00 DGR 90 DEL 14.02.2017 Rep. N. 62 del 17/03/2017 15/07/2017 30/06/2018 31/12/2018 15/07/2017 30/06/2019 31/12/2019 ONCOLOGICO - (AGENDA DIGITALE) G93D17000890002 UNIONE DIGITALE ENTI LOCALI - PROGETTO PILOTA AGENDA DIGITALE SISTEMI INFORMATIVI E ICT COMUNE DI LAURIA Amministrazione Digitale 300.000,00 300.000,00 DGR 90 DEL 14.02.2017 Rep. N. 71 del 17/03/2017 30/10/2017 30/04/2018 30/06/2018 28/02/2019 31/07/2019 31/12/2019 REALIZZAZIONE DI ELIPORTI A MATERA (CAPITALE Ufficio Gestione Regimi di DGR 427 DEL 19.05.2017 PER LA SI21E17000560002(MARATEA) DELLA CULTURA 2019) E A MARATEA PER CONSERVAZIONE E VALORIZZAZIONE PATRIMONIO COMUNE DI MATERA Aiuto, Infrastrutture AREE DI ATTRAZIONE CULTURALE 2.328.016,83 2.328.016,83 SOLA REALIZZAZIONE DEGLI Rep. N. 268 del 4/08/2017 31/12/2017 30/03/2019 30/06/2019 31/01/2019 30/09/2019 31/12/2019 I11E17000680002 (MATERA) L'ATTIVAZIONE DI UN SERVIZIO DI COLLEGAMENTO A CULTURALE E NATURALE COMUNE DI MARATEA Sportive, Culturali e ELIPORTI - IMPORTO 1,6 M€ FINI TURISTICI Ambientali Ufficio Gestione Regimi di ADEGUAMENTO CENTRO SPORTIVO ANNESSO ALLE CONSERVAZIONE E VALORIZZAZIONE PATRIMONIO Aiuto, Infrastrutture G76J17001160002 AREE DI ATTRAZIONE CULTURALE COMUNE DI LATRONICO 150.000,00 150.000,00 DGR 90 DEL 14.02.2017 Rep. -

Sistema Informativo Ministero Della Pubblica Istruzione
SISTEMA INFORMATIVO MINISTERO DELLA PUBBLICA ISTRUZIONE UFFICIO SCOLASTICO REGIONALE PER LA BASILICATA UFFICIO SCOLASTICO PROVINCIALE : POTENZA ELENCO DEI TRASFERIMENTI E PASSAGGI DEL PERSONALE DOCENTE DI RUOLO DELLA SCUOLA PRIMARIA ANNO SCOLASTICO 2013/14 ATTENZIONE: PER EFFETTO DELLA LEGGE SULLA PRIVACY QUESTA STAMPA NON CONTIENE ALCUNI DATI PERSONALI E SENSIBILI CHE CONCORRONO ALLA COSTITUZIONE DELLA STESSA. AGLI STESSI DATI GLI INTERESSATI O I CONTROINTERESSATI POTRANNO EVENTUALMENTE ACCEDERE SECONDO LE MODALITA' PREVISTE DALLA LEGGE SULLA TRASPARENZA DEGLI ATTI AMMINISTRATIVI. TRASFERIMENTI NELL'AMBITO DEL COMUNE - CLASSI COMUNI 1. ALTOMONTE ANTONIETTA . 10/ 4/66 (PZ) DA : PZEE88802T - POTENZA "L.MILANI" (POTENZA) A : PZEE88202V - SCUOLA PRIMARIA "G. ALBINI" (POTENZA) PUNTI 103 2. CANCELLARA CARMELA . 4/ 4/68 (PZ) DA : PZEE86901B - GENZANO DI LUCANIA (GENZANO DI LUCANIA) A : PZEE86901B - GENZANO DI LUCANIA (GENZANO DI LUCANIA) DA POSTO DI SOSTEGNO :MINORATI FISIOPSICHICI PUNTI 97 3. CANCELLARA MARIA NICOLETTA . 17/11/64 (PZ) DA : PZEE86901B - GENZANO DI LUCANIA (GENZANO DI LUCANIA) A : PZEE86901B - GENZANO DI LUCANIA (GENZANO DI LUCANIA) DA POSTO DI SOSTEGNO :MINORATI FISIOPSICHICI PUNTI 161 4. CAPALBO VITTORIA . 20/ 9/70 (TA) DA : PZCT71100E - C.T.P. EDA SENISE A : PZEE88503B - SENISE "S.PIETRO" (SENISE) PUNTI 75 5. CASALETTO LOREDANA . 26/ 9/67 (PZ) DA : PZEE88301N - POTENZA FRAZ. "AVIGLIANO SCALO" (POTENZA) A : PZEE88301N - POTENZA FRAZ. "AVIGLIANO SCALO" (POTENZA) DA POSTO DI LINGUA :INGLESE PRECEDENZA: TRASFERITO NELL'AMBITO DELL'ORG. FUNZ. PUNTI 161 6. CAVALLO MARISA . 12/ 4/50 (BR) DA : PZEE89501X - RIONERO IN V."MICHELE PREZIUSO" (RIONERO IN VULTURE) A : PZEE894014 - SCUOLA PRIMARIA (RIONERO IN VULTURE) (SOPRANNUMERARIO TRASFERITO CON DOMANDA CONDIZIONATA) PUNTI 124 TRASFERIMENTI NELL'AMBITO DEL COMUNE - CLASSI COMUNI 7. -

Sistema Informativo Ministero Della Pubblica Istruzione
SISTEMA INFORMATIVO MINISTERO DELLA PUBBLICA ISTRUZIONE UFFICIO SCOLASTICO REGIONALE PER LA BASILICATA UFFICIO SCOLASTICO PROVINCIALE : POTENZA ELENCO DEI TRASFERIMENTI E PASSAGGI DEL PERSONALE DOCENTE DI RUOLO DELLA SCUOLA PRIMARIA ANNO SCOLASTICO 2011/12 ATTENZIONE: PER EFFETTO DELLA LEGGE SULLA PRIVACY QUESTA STAMPA NON CONTIENE ALCUNI DATI PERSONALI E SENSIBILI CHE CONCORRONO ALLA COSTITUZIONE DELLA STESSA. AGLI STESSI DATI GLI INTERESSATI O I CONTROINTERESSATI POTRANNO EVENTUALMENTE ACCEDERE SECONDO LE MODALITA' PREVISTE DALLA LEGGE SULLA TRASPARENZA DEGLI ATTI AMMINISTRATIVI. TRASFERIMENTI NELL'AMBITO DEL COMUNE - CLASSI COMUNI 1. ALAGIA GIUSEPPINA . 8/ 1/69 (PZ) DA : PZEE88401D - SENISE "CENTRALE" (SENISE) A : PZEE88503B - SENISE "S.PIETRO" (SENISE) (SOPRANNUMERARIO TRASFERITO CON DOMANDA CONDIZIONATA) PUNTI 54 2. BRIGANTE ELISABETTA RACHELE . 22/ 8/70 (PZ) DA : PZEE88401D - SENISE "CENTRALE" (SENISE) A : PZEE88503B - SENISE "S.PIETRO" (SENISE) (SOPRANNUMERARIO TRASFERITO CON DOMANDA CONDIZIONATA) PUNTI 104 3. CIMINELLI ROSA MARIA . 28/11/57 (PZ) DA : PZCT71100E - C.T.P. EDA SENISE A : PZEE88503B - SENISE "S.PIETRO" (SENISE) PUNTI 105 4. DAMIANO MARIA . 11/ 2/71 (AV) DA : PZEE023013 - LAVELLO "MATTEOTTI" (LAVELLO) A : PZEE023013 - LAVELLO "MATTEOTTI" (LAVELLO) DA POSTO DI SOSTEGNO :MINORATI FISIOPSICHICI PUNTI 69 5. GUANTARIO MARIA LUISA . 5/ 7/66 (PZ) DA : PZEE85901R - PIGNOLA CAPOLUOGO (PIGNOLA) A : PZEE85901R - PIGNOLA CAPOLUOGO (PIGNOLA) DA POSTO DI LINGUA :INGLESE PRECEDENZA: TRASFERITO NELL'AMBITO DELL'ORG. FUNZ. PUNTI 94 6. IZZO MARIA CRISTINA . 11/ 3/49 (SA) DA : PZCT71000P - C.T.P. EDA LAGONEGRO A : PZEE852012 - LAGONEGRO "PIAZZA REPUBBLICA" (LAGONEGRO) PUNTI 99 7. LAURIA TERESA . 27/11/55 (PZ) DA : PZEE88802T - POTENZA "L.MILANI" (POTENZA) A : PZEE03801R - POTENZA "S. MARIA" (POTENZA) (SOPRANNUMERARIO TRASFERITO CON DOMANDA CONDIZIONATA) PUNTI 105 TRASFERIMENTI NELL'AMBITO DEL COMUNE - CLASSI COMUNI 8.