(ROS) Based Humanoid Robot Control Ganesh Kumar Kalyani
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Boletin Septiembre
Boletín Electrónico Rama de Estudiantes de la UNED Septiembre-2011 EDITOR AGRADECIMIENTOS Miguel Latorre Vicerrectorado de Investigación UNED ([email protected]) Vicerrectorado de Estudiantes y Desarrollo Profesional UNED Escuela Técnica Superior de Ingenieros REVISORES Industriales UNED Manuel Castro Escuela Técnica Superior de Ingenieros Miguel Latorre Informáticos UNED Germán Carro Sección Española del IEEE Departamento de Ingeniería Eléctrica, Electrónica y de Control (DIEEC) UNED DISEÑO PORTADA IEEE Women In Engineering (WIE) Sergio Martín AGRADECIMIENTO ESPECIAL AUTORES Agradecemos a nuestro Catedrático de Germán Carro Tecnología Electrónica y Profesor Núria Girbau Consejero de la Rama, Manuel Castro, Francisco J. Caneda todo el tiempo y la dedicación que nos Miguel Latorre presta, así como, el habernos dado la Mohamed Tawfik posibilidad de colaborar con el Capítulo Español de la Sociedad de Educación del IEEE para la elaboración del mismo. Agradecemos a todos los autores, y a aquellos que han colaborado para hacer posible este Boletín Electrónico. BOLETÍN DESARROLLADO EN COLABORACIÓN CON EL CAPÍTULO ESPAÑOL DE LA SOCIEDAD DE EDUCACIÓN DEL IEEE Junta Directiva 2010-2012 Germán Carro Fernández. Actualmente, también colabora con Presidente de la Rama de el departamento de ingeniería Estudiantes del IEEE-UNED. eléctrica electrónica y de control Economista, Ingeniero Técnico en (DIEEC) de la UNED en proyectos Informática de Sistemas y relacionados con objetos de Estudiante del Master en el aprendizaje. Departamento de IEEC en la ETSII [email protected] de la UNED. En años anteriores ha colaborado con la Junta Directiva Ramón Carrasco. Vicepresidente de como Vicepresidente y como zona - A Coruña.. Licenciado en Coordinador de Actividades Ciencias Física, especialidad Generales. -

Introduction to ROS – Robot Operating System –
Introduction to ROS – Robot Operating System – Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès SPAIN [email protected] ABSTRACT This paper gives an introduction to the open-source Robot Operating System (ROS. ROS has been widely adopted by the research robotics community as it provides a powerful software framework to develop autonomous unmanned systems. In this paper, we discuss some of the components that are available on the ROS repository. 1.0 INTRODUCTION The Robot Operating System (ROS) [1] is an open source robot operating system. It provides libraries and tools to help software developers create robot applications. It offers hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. ROS is similar in some respects to 'robot frameworks,' such as Player, YARP, Orocos, CARMEN, Orca, MOOS, and Microsoft Robotics Studio. The primary goal of ROS is to support code reuse in robotics research and development. It has been quickly adopted by many robotics research institutions and companies as their standard development framework. The list of robots using ROS is quite extent and it includes platforms from diverse domains, ranging from aerial and ground robots to humanoids and underwater vehicles. To name some, the humanoid robots PR-2 and REEM-C, ground robots such as the ClearPath platforms and aerial platforms such as the ones from Ascending Technologies are fully developed in ROS. Furthermore, a quite extent list of popular sensors for robots is already supported in ROS. To name some, sensors such as Inertial Measurement Units, GPS receivers, cameras and lasers can already be accessed from the drivers widely available on the ROS system. -

Towards Autonomous Multi-Robot Mobile Deposition for Construction
YouWasps: Towards Autonomous Multi-Robot Mobile Deposition for Construction Julius Sustarevas1, Benjamin K. X. Tan1, David Gerber2, Robert Stuart-Smith1;3 and Vijay M. Pawar1;3 Abstract— Mobile multi-robot construction systems offer new ways to optimise the on-site construction process. In this paper we begin to investigate the functionality requirements for controlling a team of robots to build structures much greater than their individual workspace. To achieve these aims, we present a mobile extruder robot called YouWasp. We also begin to explore methods for collision aware printing and construction task decomposition and allocation. These are deployed via YouWasp and enable it to deposit material autonomously. In doing so, we are able to evaluate the potential for parallelization of tasks and printing autonomy in simulation as well as physical team of robots. Altogether, these results provide a foundation for future work that enable fleets of mobile construction systems to cooperate and help us shape our built environment in new ways. Fig. 1: Visualisation of YouWasp team of robots deployed in a construction scenario. I. INTRODUCTION The US$8.8 trillion global market value[1] of the con- manufacturing companies such as Apis Cor in Russia, Win- struction sector, shows the unmatched effort that construc- sun Decoration Engineering Company in China, NASA’s tion, as a human endevour, receives. In fact, construction 3D printing in Zero-G and US Armed Forces on-site 3D is often seen as the sector at the forefront of tackling printed barracks. Within this context, typical examples use global challenges like population growth, urbanisation and either gantry-type solutions or industrial robots with 3-to- sustainability[2]. -

Robot Operating System - the Complete Reference (Volume 4) Part of the Studies in Computational Intelligence Book Series (SCI, Volume 831)
Book Robot Operating System - The Complete Reference (Volume 4) Part of the Studies in Computational Intelligence book series (SCI, volume 831) Several authors CISTER-TR-190702 2019 Book CISTER-TR-190702 Robot Operating System - The Complete Reference (Volume 4) Robot Operating System - The Complete Reference (Volume 4) Several authors CISTER Research Centre Rua Dr. António Bernardino de Almeida, 431 4200-072 Porto Portugal Tel.: +351.22.8340509, Fax: +351.22.8321159 E-mail: https://www.cister-labs.pt Abstract This is the fourth volume of the successful series Robot Operating Systems: The Complete Reference, providing a comprehensive overview of robot operating systems (ROS), which is currently the main development framework for robotics applications, as well as the latest trends and contributed systems. The book is divided into four parts: Part 1 features two papers on navigation, discussing SLAM and path planning. Part 2 focuses on the integration of ROS into quadcopters and their control. Part 3 then discusses two emerging applications for robotics: cloud robotics, and video stabilization. Part 4 presents tools developed for ROS; the first is a practical alternative to the roslaunch system, and the second is related to penetration testing. This book is a valuable resource for ROS users and wanting to learn more about ROS capabilities and features. © 2019 CISTER Research Center 1 www.cister-labs.pt Studies in Computational Intelligence 831 Anis Koubaa Editor Robot Operating System (ROS) The Complete Reference (Volume 4) Studies in Computational Intelligence Volume 831 Series Editor Janusz Kacprzyk, Polish Academy of Sciences, Warsaw, Poland [email protected] The series “Studies in Computational Intelligence” (SCI) publishes new develop- ments and advances in the various areas of computational intelligence—quickly and with a high quality. -

8. Robotic Systems Architectures and Programming
187 8. RoboticRobotic Systems Architectures and Programming Syste David Kortenkamp, Reid Simmons 8.1 Overview.............................................. 187 Robot software systems tend to be complex. This 8.1.1 Special Needs complexity is due, in large part, to the need to con- of Robot Architectures .................. 188 trol diverse sensors and actuators in real time, in 8.1.2 Modularity and Hierarchy.............. 188 the face of significant uncertainty and noise. Robot 8.1.3 Software Development Tools.......... 188 systems must work to achieve tasks while moni- toring for, and reacting to, unexpected situations. 8.2 History ................................................ 189 Doing all this concurrently and asynchronously 8.2.1 Subsumption ............................... 189 adds immensely to system complexity. 8.2.2 Layered Robot Control Architectures 190 The use of a well-conceived architecture, 8.3 Architectural Components ..................... 193 together with programming tools that support 8.3.1 Connecting Components................ 193 the architecture, can often help to manage that 8.3.2 Behavioral Control........................ 195 complexity. Currently, there is no single archi- 8.3.3 Executive .................................... 196 tecture that is best for all applications – different 8.3.4 Planning ..................................... 199 architectures have different advantages and dis- 8.4 Case Study – GRACE ............................... 200 advantages. It is important to understand those strengths and weaknesses when choosing an 8.5 The Art of Robot Architectures ............... 202 architectural approach for a given application. 8.6 Conclusions and Further Reading ........... 203 This chapter presents various approaches to architecting robotic systems. It starts by defining References .................................................. 204 terms and setting the context, including a recount- ing of the historical developments in the area of robot architectures. -

Development of a Series Elastic Actuator and a Distributed Computational Platform for Robotics
Development of a Series Elastic Actuator and a Distributed Computational Platform for Robotics Gonçalo Patrício Luís Thesis to obtain the Master of Science Degree in Mechanical Engineering Supervisor: Prof. Jorge Manuel Mateus Martins Examination Committee Chairperson: Prof. João Rogério Caldas Pinto Supervisor: Prof. Jorge Manuel Mateus Martins Member of the Committee: Prof. Carlos Baptista Cardeira November 2015 i ii To my Parents iii iv Acknowledgments I would like to thank Professor Jorge Martins for believing in my ideas on building a new computational platform from scratch in detriment of using the old platform. The first task he gave me was to play arround with the old platform until I felt confortable with it, not all teachers believe in loosing time on learning things that are supposed to work and should only be used instead of studied. In the end the freedom he gave me turned into finding gross mistakes in the old platform and ultimately building a new, more capable one. I would like to thank Professor Carlos Cardeira for clearing some questions I had about electronics regarding the circuit board for voltage conversion. I would also like to thank Professor Paulo Oliveira and Professor Alexandra Moutinho for showing me the power and beauty of control systems engineering in the lecture I had with them on that topic. Their practical and clear explanations ultimately made me choose Systems as my Masters area, a choice I couldn’t be happier about. I am also deeply grateful to all the other teachers on the systems department and Eng. Camilo for creating and maintaining a friendly environment during classes and at the laboratory. -

Then and Now: Servos
NOW Then and SERVOS by Tom Carroll ervos? Just what is a servo (or a servo hack one to see what I could do with it. beginner’s kits from Parallax and others Smotor or servo mechanism, as they I believe that first thing I made was use similar servos in small robots. are sometimes called)? Is that a year’s a linear actuator. Pulling the 4.7K pot Tabletop robots can make use of collection of this magazine? Most of us out, cutting off the stops from the the little motor/gearbox to drive a who have built robots have used one or output gear, I attached a 25 turn lead set of wheels and the associated more of these in our creations, but not all screw and a 25 turn 5K trim pot (in the electronics to receive the pulse trains robots use servos. Most of the larger vari- place of the other one) to the output from a microcontroller and convert eties of robots don’t use servos though shaft and had an amazingly powerful them to drive signals. This is a cheap they might employ shaft encoders to push-pull actuator. Other experi- and effective way to get a robot design provide some sort of positional feedback menters in our robotics group were from a few sketches to a working to a controlling microcontroller or attaching them to arm and leg joints, machine in a few hours. computer. Most combat robots (like the and driving the servos with 555/556 As robot experimenters, we think ones that seem out of control) don’t use timer circuits or 6502 microprocessors, of those little black boxes that any form of them, so why do so many and a few started to use them as drive were originally developed for model experimenters utilize them? motors for small robot’s wheels. -

National Robotics Initiative (NRI)(Nsf11553)
This document has been archived and replaced by NSF 12-607. National Robotics Initiative (NRI) The realization of co-robots acting in direct support of individuals and groups PROGRAM SOLICITATION NSF 11-553 National Science Foundation Directorate for Computer & Information Science & Engineering Division of Information & Intelligent Systems Directorate for Social, Behavioral & Economic Sciences Directorate for Engineering Directorate for Education & Human Resources National Institutes of Health National Institute of Neurological Disorders and Stroke National Institute on Aging National Institute of Biomedical Imaging and Bioengineering National Center for Research Resources Eunice Kennedy Shriver National Institute of Child Health and Human Development National Institute of Nursing Research U.S. Dept. of Agriculture National Institute of Food and Agriculture National Aeronautics and Space Administration Directorate for Education and Human Resources, Game Changing Technology Division Letter of Intent Due Date(s) (required) (due by 5 p.m. proposer's local time): October 01, 2011 October 1, Annually Thereafter Small Proposals December 15, 2011 December 15, Annually Thereafter Group Large Proposals Full Proposal Deadline(s) (due by 5 p.m. proposer's local time): November 03, 2011 November 3, Annually Thereafter Small Proposals January 18, 2012 January 18, Annually Thereafter Group Large Proposals IMPORTANT INFORMATION AND REVISION NOTES Public Briefings: One or more collaborative webinar briefings with question and answer functionality will -
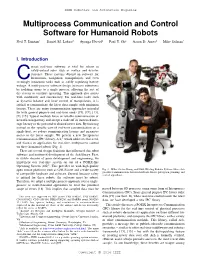
Multiprocess Communication and Control Software for Humanoid Robots Neil T
IEEE Robotics and Automation Magazine Multiprocess Communication and Control Software for Humanoid Robots Neil T. Dantam∗ Daniel M. Lofaroy Ayonga Hereidx Paul Y. Ohz Aaron D. Amesx Mike Stilman∗ I. Introduction orrect real-time software is vital for robots in safety-critical roles such as service and disaster response. These systems depend on software for Clocomotion, navigation, manipulation, and even seemingly innocuous tasks such as safely regulating battery voltage. A multi-process software design increases robustness by isolating errors to a single process, allowing the rest of the system to continue operating. This approach also assists with modularity and concurrency. For real-time tasks such as dynamic balance and force control of manipulators, it is critical to communicate the latest data sample with minimum latency. There are many communication approaches intended for both general purpose and real-time needs [19], [17], [13], [9], [15]. Typical methods focus on reliable communication or network-transparency and accept a trade-off of increased mes- sage latency or the potential to discard newer data. By focusing instead on the specific case of real-time communication on a single host, we reduce communication latency and guarantee access to the latest sample. We present a new Interprocess Communication (IPC) library, Ach,1 which addresses this need, and discuss its application for real-time, multiprocess control on three humanoid robots (Fig. 1). There are several design decisions that influenced this robot software and motivated development of the Ach library. First, to utilize decades of prior development and engineering, we implement our real-time system on top of a POSIX-like Operating System (OS)2. -

Applying Machine Learning to Robotics WHITEPAPER
WHITEPAPER Credit: Pixabay Applying Machine Learning to Robotics TABLE OF CONTENTS MACHINE LEARNING - TOP MARKS FOR POTENTIAL MACHINE LEARNING SOLVES BUSINESS PROBLEMS CURRENT TECHNOLOGIES AND SUPPLIERS MACHINE LEARNING IN ROBOTICS: EXAMPLE 1 MACHINE LEARNING IN ROBOTICS: EXAMPLE 2 MACHINE LEARNING IN ROBOTICS: EXAMPLE 3 NEXT-GENERATION INDUSTRY WILL RELY ON MACHINE LEARNING roboticsbusinessreview.com 2 APPLYING MACHINE LEARNING TO ROBOTICS Advances in artificial intelligence are making robots smarter at pick-and- place operations, drones more autonomous, and the Industrial Internet of Things more connected. Where else could machine learning help? By Andrew Williams A growing number of businesses worldwide are waking up to the potentially transformative capabilities of machine learning - particularly when applied to robotics systems in the workplace. In recent years, the capacity of machine learning to improve efficiency in fields as diverse as manufacturing assembly, pick-and-place operations, quality control and drone systems has also gathered a great deal of momentum. Knowing that machine learning is improving also heightens awareness of great strides being made in artificial intelligence (AI), to the extent that the two technologies are often viewed interchangeably. Major recent advances in topics such as logic and data analytics, algorithm development, and predictive analytics are also driving AI’s growth. In this report, we’ll review the latest cutting-edge machine learning research and development around the globe, and explore some emerging applications in the field of robotics. MACHINE LEARNING - TOP MARKS FOR POTENTIAL A September 2017 report by Research and Markets predicts the global machine learning market will grow from $1.4 billion in 2017 to $8.81 billion by 2022, with a compound annual growth rate of 44.1%. -

ARCS-Assisted Teaching Robots Based on Anticipatory Computing and Emotional Big Data for Improving Sustainable Learning Efficiency and Motivation
sustainability Article ARCS-Assisted Teaching Robots Based on Anticipatory Computing and Emotional Big Data for Improving Sustainable Learning Efficiency and Motivation Yi-Zeng Hsieh 1,2,3 , Shih-Syun Lin 4,* , Yu-Cin Luo 1, Yu-Lin Jeng 5 , Shih-Wei Tan 1,*, Chao-Rong Chen 6 and Pei-Ying Chiang 7 1 Department of Electrical Engineering, National Taiwan Ocean University, Keelung City 202, Taiwan; [email protected] (Y.-Z.H.); [email protected] (Y.-C.L.) 2 Institute of Food Safety and Risk Management, National Taiwan Ocean University, Keelung City 202, Taiwan 3 Center of Excellence for Ocean Engineering, National Taiwan Ocean University, Keelung City 202, Taiwan 4 Department of Computer Science and Engineering, National Taiwan Ocean University, Keelung City 202, Taiwan 5 Department of Information Management, Southern Taiwan University of Science and Technology, Tainan 710, Taiwan; [email protected] 6 Department of Electrical Engineering, National Taipei University of Technology, Taipei 106, Taiwan; [email protected] 7 Department of Computer Science and Information Engineering, National Taipei University of Technology, Taipei 106, Taiwan; [email protected] * Correspondence: [email protected] (S.-S.L.); [email protected] (S.-W.T.) Received: 3 March 2020; Accepted: 17 June 2020; Published: 12 July 2020 Abstract: Under the vigorous development of global anticipatory computing in recent years, there have been numerous applications of artificial intelligence (AI) in people’s daily lives. Learning analytics of big data can assist students, teachers, and school administrators to gain new knowledge and estimate learning information; in turn, the enhanced education contributes to the rapid development of science and technology. -
Design of a Canine Inspired Quadruped Robot As a Platform for Synthetic Neural Network Control
Portland State University PDXScholar Dissertations and Theses Dissertations and Theses Spring 7-15-2019 Design of a Canine Inspired Quadruped Robot as a Platform for Synthetic Neural Network Control Cody Warren Scharzenberger Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/open_access_etds Part of the Mechanical Engineering Commons, and the Robotics Commons Let us know how access to this document benefits ou.y Recommended Citation Scharzenberger, Cody Warren, "Design of a Canine Inspired Quadruped Robot as a Platform for Synthetic Neural Network Control" (2019). Dissertations and Theses. Paper 5135. https://doi.org/10.15760/etd.7014 This Thesis is brought to you for free and open access. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. Design of a Canine Inspired Quadruped Robot as a Platform for Synthetic Neural Network Control by Cody Warren Scharzenberger A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering Thesis Committee: Alexander Hunt, Chair David Turcic Sung Yi Portland State University 2019 Abstract Legged locomotion is a feat ubiquitous throughout the animal kingdom, but modern robots still fall far short of similar achievements. This paper presents the design of a canine-inspired quadruped robot named DoggyDeux as a platform for synthetic neural network (SNN) research that may be one avenue for robots to attain animal-like agility and adaptability. DoggyDeux features a fully 3D printed frame, 24 braided pneumatic actuators (BPAs) that drive four 3-DOF limbs in antagonistic extensor-flexor pairs, and an electrical system that allows it to respond to commands from a SNN comprised of central pattern generators (CPGs).