Efficient Sampling of SAT and SMT Solutions for Testing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CSE370: Introduction to Digital Design
Announcements • Reading assignments CSE 311 Foundations of – 7th Edition, Section 9.1 and pp. 594-601 – 6th Edition, Section 8.1 and pp. 541-548 Computing I – 5th Edition, Section 7.1 and pp. 493-500 Lecture 19 • Upcoming topics – Relations Relations – Finite State Machines Autumn 2011 Autumn 2011 CSE 311 1 Autumn 2011 CSE 311 2 Definition of Relations Relation Examples Let A and B be sets, R1 = {(a, 1), (a, 2), (b, 1), (b, 3), (c, 3)} A binary relation from A to B is a subset of A B R2 = {(x, y) | x ≡ y (mod 5) } Let A be a set, A binary relation on A is a subset of A A R3 = {(c1, c2) | c1 is a prerequisite of c2 } R4 = {(s, c) | student s had taken course c } Autumn 2011 CSE 311 4 Properties of Relations Combining Relations Let R be a relation on A Let R be a relation from A to B R is reflexive iff (a,a) R for every a A Let S be a relation from B to C The composite of R and S, S R is the relation R is symmetric iff (a,b) R implies (b, a) R from A to C defined S R = {(a, c) | b such that (a,b) R and (b,c) S} R is antisymmetric iff (a,b) R and a b implies (b,a) / R R is transitive iff (a,b) R and (b, c) R implies (a, c) R Examples Examples (a,b) Parent: b is a parent of a Using the relations: Parent, Child, Brother, (a,b) Sister: b is a sister of a Sister, Sibling, Father, Mother express What is Parent Sister? Uncle: b is an uncle of a What is Sister Parent? Cousin: b is a cousin of a S R = {(a, c) | b such that (a,b) R and (b,c) S} Powers of a Relation How is Anderson related to Bernoulli? R2 = R R = {(a, c) | b such -
Mathematicians Timeline
Rikitar¯oFujisawa Otto Hesse Kunihiko Kodaira Friedrich Shottky Viktor Bunyakovsky Pavel Aleksandrov Hermann Schwarz Mikhail Ostrogradsky Alexey Krylov Heinrich Martin Weber Nikolai Lobachevsky David Hilbert Paul Bachmann Felix Klein Rudolf Lipschitz Gottlob Frege G Perelman Elwin Bruno Christoffel Max Noether Sergei Novikov Heinrich Eduard Heine Paul Bernays Richard Dedekind Yuri Manin Carl Borchardt Ivan Lappo-Danilevskii Georg F B Riemann Emmy Noether Vladimir Arnold Sergey Bernstein Gotthold Eisenstein Edmund Landau Issai Schur Leoplod Kronecker Paul Halmos Hermann Minkowski Hermann von Helmholtz Paul Erd}os Rikitar¯oFujisawa Otto Hesse Kunihiko Kodaira Vladimir Steklov Karl Weierstrass Kurt G¨odel Friedrich Shottky Viktor Bunyakovsky Pavel Aleksandrov Andrei Markov Ernst Eduard Kummer Alexander Grothendieck Hermann Schwarz Mikhail Ostrogradsky Alexey Krylov Sofia Kovalevskya Andrey Kolmogorov Moritz Stern Friedrich Hirzebruch Heinrich Martin Weber Nikolai Lobachevsky David Hilbert Georg Cantor Carl Goldschmidt Ferdinand von Lindemann Paul Bachmann Felix Klein Pafnuti Chebyshev Oscar Zariski Carl Gustav Jacobi F Georg Frobenius Peter Lax Rudolf Lipschitz Gottlob Frege G Perelman Solomon Lefschetz Julius Pl¨ucker Hermann Weyl Elwin Bruno Christoffel Max Noether Sergei Novikov Karl von Staudt Eugene Wigner Martin Ohm Emil Artin Heinrich Eduard Heine Paul Bernays Richard Dedekind Yuri Manin 1820 1840 1860 1880 1900 1920 1940 1960 1980 2000 Carl Borchardt Ivan Lappo-Danilevskii Georg F B Riemann Emmy Noether Vladimir Arnold August Ferdinand -

An Introduction to the Classical Three-Body Problem from Periodic Solutions to Instabilities and Chaos
GENERAL ARTICLE An Introduction to the Classical Three-Body Problem From Periodic Solutions to Instabilities and Chaos Govind S Krishnaswami and Himalaya Senapati The classical three-body problem arose in an attempt to un- derstand the effect of the Sun on the Moon’s Keplerian orbit around the Earth. It has attracted the attention of some of the best physicists and mathematicians and led to the discovery of ‘chaos’. We survey the three-body problem in its historical context and use it to introduce several ideas and techniques that have been developed to understand classical mechanical (Left) Govind Krishnaswami systems. is on the faculty of the Chennai Mathematical Institute. His research concerns various problems in 1. Introduction theoretical and mathematical physics. The three-body problem is one of the oldest problems in classical dynamics that continues to throw up surprises. It has challenged (Right) Himalaya Senapati is scientists from Newton’s time to the present. It arose in an at- a PhD student at the Chennai tempt to understand the Sun’s effect on the motion of the Moon Mathematical Institute. He works on dynamical systems around the Earth. This was of much practical importance in ma- and chaos. rine navigation, where lunar tables were necessary to accurately determine longitude at sea (see Box 1). The study of the three-body problem led to the discovery of the planet Neptune (see Box 2), it explains the location and stability of the Trojan asteroids and has furthered our understanding of the stability of the solar system [1]. Quantum mechanical variants of Keywords the three-body problem are relevant to the helium atom and water Kepler problem, three-body prob- lem, celestial mechanics, classi- molecule [2]. -
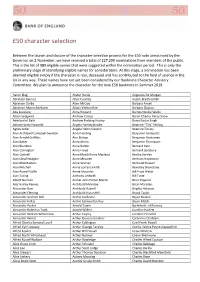
50 Character Selection
£50 character selection Between the launch and closure of the character selection process for the £50 note announced by the Governor on 2 November, we have received a total of 227,299 nominations from members of the public. This is the list of 989 eligible names that were suggested within the nomination period. This is only the preliminary stage of identifying eligible names for consideration: At this stage, a nomination has been deemed eligible simply if the character is real, deceased and has contributed to the field of science in the UK in any way. These names have not yet been considered by our Banknote Character Advisory Committee. We plan to announce the character for the new £50 banknote in Summer 2019. Aaron Klug Alister Hardy Augustus De Morgan Abraham Bennet Allen Coombs Austin Bradford Hill Abraham Darby Allen McClay Barbara Ansell Abraham Manie Adelstein Alliott Verdon Roe Barbara Clayton Ada Lovelace Alma Howard Barnes Neville Wallis Adam Sedgwick Andrew Crosse Baron Charles Percy Snow Aderlard of Bath Andrew Fielding Huxley Bawa Kartar Singh Adrian Hardy Haworth Angela Hartley Brodie Beatrice "Tilly" Shilling Agnes Arber Angela Helen Clayton Beatrice Tinsley Alan Archibald Campbell‐Swinton Anita Harding Benjamin Gompertz Alan Arnold Griffiths Ann Bishop Benjamin Huntsman Alan Baker Anna Atkins Benjamin Thompson Alan Blumlein Anna Bidder Bernard Katz Alan Carrington Anna Freud Bernard Spilsbury Alan Cottrell Anna MacGillivray Macleod Bertha Swirles Alan Lloyd Hodgkin Anne McLaren Bertram Hopkinson Alan MacMasters Anne Warner -
12. Crafting the Quantum: Chaps 1-3
12. Crafting the Quantum: Chaps 1-3. • History of development of theoretical physics: 1890-1926. • Cast of Characters: Arnold Sommerfeld Max Planck Niels Bohr Albert Einstein Werner Heisenberg Wolfgang Pauli • Key issues: What is the content of theoretical physics? What are its methods? How should it be taught? Claim: "...theoretical physics at the turn of the twentieth century cannot be understood as a 'distillation' of theory from physics, but rather must be seen as having been actively constructed from multiple and varied parts." (pg. 14) • Two contrasting approaches: Physics of Principle (Planck, Einstein, Bohr): Ex: Planck. Method: principled analysis based on thermodyn & statistics. Experiment limited to testing of conclusions. Physics of Problems (Sommerfeld): Method: problem-based analysis based on electrodyn & mechanics. Experiments as constitutive element at multiple states in the production of theoretical work. Claim: Contrary to Kuhn, "...for those working within the context of a physics of problems, neither crises nor revolutions came to pass in the mid 1920s." (pg. 10) I. Sommerfeld's Physics of Problems. • A blend of mathematics, engineering, and physics. 1. Sommerfeld as Mathematician. • 1891: Thesis in Königsberg. "Arbitrary Functions in Mathematical Physics." • 1893: Assistant to Felix Klein in Göttingen. 1872: Erlangen Programme: Klein's categorization of geometries in terms of their symmetry group. 1882: Klein bottle: 2-dim non-oriented closed surface. Felix Klein Compare with Mobius strip: 2-dim non-oriented open surface. 2. Sommerfeld as Engineer. • 1900: Appointed Professor of Technical Mechanics at the Rheinisch- Westphalisch Technische Hochschule (RWTH), Aachen. • 1870: Aachen Hochschule established. • 1880s: Cultural conflicts between traditional universities and technical institutes in Germany. -

Arthur Cayley As Sadleirian Professor
Historia Mathematica 26 (1999), 125–160 Article ID hmat.1999.2233, available online at http://www.idealibrary.com on Arthur Cayley as Sadleirian Professor: A Glimpse of Mathematics View metadata, citation and similar papers at core.ac.ukTeaching at 19th-Century Cambridge brought to you by CORE provided by Elsevier - Publisher Connector Tony Crilly Middlesex University Business School, The Burroughs, London NW4 4BT, UK E-mail: [email protected] This article contains the hitherto unpublished text of Arthur Cayley’s inaugural professorial lecture given at Cambridge University on 3 November 1863. Cayley chose a historical treatment to explain the prevalent basic notions of analytical geometry, concentrating his attention in the period (1638–1750). Topics Cayley discussed include the geometric interpretation of complex numbers, the theory of pole and polar, points and lines at infinity, plane curves, the projective definition of distance, and Pascal’s and Maclaurin’s geometrical theorems. The paper provides a commentary on this lecture with reference to Cayley’s work in geometry. The ambience of Cambridge mathematics as it existed after 1863 is briefly discussed. C 1999 Academic Press Cet article contient le texte jusqu’ici in´editde la le¸coninaugurale de Arthur Cayley donn´ee `a l’Universit´ede Cambridge le 3 novembre 1863. Cayley choisit une approche historique pour expliquer les notions fondamentales de la g´eom´etrieanalytique, qui existaient alors, en concentrant son atten- tion sur la p´eriode1638–1750. Les sujets discut´esincluent l’interpretation g´eom´etriquedes nombres complexes, la th´eoriedes pˆoleset des polaires, les points et les lignes `al’infini, les courbes planes, la d´efinition projective de la distance, et les th´eor`emesg´eom´etriquesde Pascal et de Maclaurin. -

James Clerk Maxwell - Wikipedia, the Free Encyclopedia Page 1 of 15
James Clerk Maxwell - Wikipedia, the free encyclopedia Page 1 of 15 James Clerk Maxwell From Wikipedia, the free encyclopedia James Clerk Maxwell of Glenlair [1] FRS FRSE (13 June James Clerk Maxwell 1831 – 5 November 1879) was a Scottish [2] physicist and mathematician. His most prominent achievement was formulating classical electromagnetic theory. This united all previously unrelated observations, experiments and equations of electricity, magnetism and even optics into a consistent theory. [3] Maxwell's equations demonstrated that electricity, magnetism and even light are all manifestations of the same phenomenon, namely the electromagnetic field. Subsequently, all other classic laws or equations of these disciplines became simplified cases of Maxwell's equations. Maxwell's achievements concerning electromagnetism have been called the "second great unification in physics", [4] after the first one realised by Isaac Newton. He was the first cousin of notable 19th century artist Jemima Blackburn. Maxwell demonstrated that electric and magnetic fields James Clerk Maxwell (1831–1879) travel through space in the form of waves, and at the Born 13 June 1831 constant speed of light. In 1865 Maxwell published A Edinburgh, Scotland Dynamical Theory of the Electromagnetic Field . It was with this that he first proposed that light was in fact Died 5 November 1879 undulations in the same medium that is the cause of electric (aged 48) and magnetic phenomena. [5] His work in producing a Cambridge, England unified model of electromagnetism is one of the greatest Citizenship British advances in physics. Nationality British Maxwell also helped develop the Maxwell –Boltzmann Fields Physics and mathematics distribution, which is a statistical means of describing Institutions Marischal College, aspects of the kinetic theory of gases. -

James Clerk Maxwell - Poems
Classic Poetry Series James Clerk Maxwell - poems - Publication Date: 2012 Publisher: Poemhunter.com - The World's Poetry Archive James Clerk Maxwell(13 June 1831 – 5 November 1879) James Clerk Maxwell was a Scottish theoretical physicist and mathematician. His most important achievement was classical electromagnetic theory, synthesizing all previously unrelated observations, experiments and equations of electricity, magnetism and even optics into a consistent theory. His set of equations—Maxwell's equations—demonstrated that electricity, magnetism and even light are all manifestations of the same phenomenon: the electromagnetic field. From that moment on, all other classic laws or equations of these disciplines became simplified cases of Maxwell's equations. Maxwell's work in electromagnetism has been called the "second great unification in physics", after the first one carried out by Isaac Newton. Maxwell demonstrated that electric and magnetic fields travel through space in the form of waves, and at the constant speed of light. Finally, in 1864 Maxwell wrote "A dynamical theory of the electromagnetic field", where he first proposed that light was in fact undulations in the same medium that is the cause of electric and magnetic phenomena. His work in producing a unified model of electromagnetism is considered to be one of the greatest advances in physics. Maxwell also developed the Maxwell distribution, a statistical means of describing aspects of the kinetic theory of gases. These two discoveries helped usher in the era of modern physics, laying the foundation for future work in such fields as special relativity and quantum mechanics. Maxwell is also known for creating the first true colour photograph in 1861 and for his foundational work on the rigidity of rod-and-joint frameworks like those in many bridges. -

Mathematisches Forschungsinstitut Oberwolfach Disciplines and Styles
Mathematisches Forschungsinstitut Oberwolfach Report No. 12/2010 DOI: 10.4171/OWR/2010/12 Disciplines and Styles in Pure Mathematics, 1800-2000 Organised by David Rowe, Mainz Klaus Volkert, K¨oln Philippe Nabonnand, Nancy Volker Remmert, Mainz February 28th – March 6th, 2010 Abstract. This workshop addressed issues of discipline and style in num- ber theory, algebra, geometry, topology, analysis, and mathematical physics. Most speakers presented case studies, but some offered global surveys of how stylistic shifts informed the transition and transformation of special research fields. Older traditions in established research communities were considered alongside newer trends, including changing views regarding the role of proof. Mathematics Subject Classification (2010): 01A55, 01A60, 01A72, 01A74, 01A80, 01A85. Introduction by the Organisers This interdisciplinary workshop brought together mathematicians, historians, and philosophers to discuss a theme of general interest for understanding developments in mathematics over a span of two hundred years. The emergence and development of various disciplines in pure mathematics after 1800 has now been studied in a number of special contexts, some of which played an important role in shaping the character of modern research traditions. It has long been understood that the pe- riod after 1800 saw a kind of emancipation of mathematical research from related work in nearby fields, especially astronomy and physics. This general trend not only led to a proliferation of special disciplines and wholly new fields of knowledge, it also went hand in hand with a variety of innovative styles, new ways of doing and presenting mathematics. Issues of style have long been central for historians of art and literature, but such matters have seldom been addressed in the histor- ical literature on mathematics, despite the fact that mathematicians themselves have often been acutely aware of the importance of creative styles. -
Warwick A. Masters of Theory. Cambridge and the Rise Of
Masters of Theory Masters of Theory Cambridge and the Rise of Mathematical Physics ANDREW WARWICK The University of Chicago Press Chicago and London Andrew Warwick is senior lecturer in the history of science at Imperial College, Lon- don. He is coeditor of Teaching the History of Science and Histories of the Electron: The Birth of Microphysics. The University of Chicago Press, Chicago 60637 The University of Chicago Press, Ltd., London © 2003 by The University of Chicago All rights reserved. Published 2003 Printed in the United States of America 12 11 10 09 08 07 06 05 04 03 1 2 3 4 5 isbn: 0-226-87374-9 (cloth) isbn: 0-226-87375-7 (paper) Library of Congress Cataloging-in-Publication Data Warwick, Andrew. Masters of theory : Cambridge and the rise of mathematical physics / Andrew Warwick. p. cm. Includes bibliographical references and index. isbn 0-226-87374-9 (cloth : alk. paper) — isbn 0-226-87375-7 (pbk : alk. paper) 1. Mathematical physics—History—19th century. 2. University of Cambridge—History—19th century. I. Title. qc19.6 .w37 2003 530.15Ј09426Ј59Ј09034 —dc21 2002153732 ᭺ϱ The paper used in this publication meets the minimum ruirements of the Americanational Standard for Information Sciences—Permanence of Paper for Printed Library Materials, ansi z 39.48-1992. Contents List of Illustrations vii Preface and Acknowledgments ix Note on Conventions and Sources xiii 1 Writing a Pedagogical History of Mathematical Physics 1 2 The Reform Coach Teaching Mixed Mathematics in Georgian and Victorian Cambridge 49 3 A Mathematical World -

NEWSLETTER Issue: 488 - May 2020
i “"NLMS_488 (Katherine Wright’s conicted copy 2020-04-20)"” — 2020/4/21 — 10:17 — page 1 — #1 i i i NEWSLETTER Issue: 488 - May 2020 PHILIPPA 2520 MATHS FAWCETT ANTS FOR MEETS DYLAN ARTS i i i i i “"NLMS_488 (Katherine Wright’s conicted copy 2020-04-20)"” — 2020/4/21 — 10:17 — page 2 — #2 i i i EDITOR-IN-CHIEF COPYRIGHT NOTICE Eleanor Lingham (Sheeld Hallam University) News items and notices in the Newsletter may [email protected] be freely used elsewhere unless otherwise stated, although attribution is requested when reproducing whole articles. Contributions to EDITORIAL BOARD the Newsletter are made under a non-exclusive June Barrow-Green (Open University) licence; please contact the author or David Chillingworth (University of Southampton) photographer for the rights to reproduce. Jessica Enright (University of Glasgow) The LMS cannot accept responsibility for the Jonathan Fraser (University of St Andrews) accuracy of information in the Newsletter. Views Jelena Grbic´ (University of Southampton) expressed do not necessarily represent the Cathy Hobbs (UWE) views or policy of the Editorial Team or London Thomas Hudson (University of Warwick) Mathematical Society. Stephen Huggett Adam Johansen (University of Warwick) ISSN: 2516-3841 (Print) Aditi Kar (Royal Holloway University) ISSN: 2516-385X (Online) Mark McCartney (Ulster University) DOI: 10.1112/NLMS Susan Oakes (London Mathematical Society) Andrew Wade (Durham University) Mike Whittaker (University of Glasgow) NEWSLETTER WEBSITE Early Career Content Editor: Jelena Grbic´ The Newsletter is freely available electronically News Editor: Susan Oakes at lms.ac.uk/publications/lms-newsletter. Reviews Editor: Mark McCartney MEMBERSHIP CORRESPONDENTS AND STAFF Joining the LMS is a straightforward process. -

An Introduction to the Classical Three-Body Problem: from Periodic
An introduction to the classical three-body problem From periodic solutions to instabilities and chaos GOVIND S. KRISHNASWAMI AND HIMALAYA SENAPATI Chennai Mathematical Institute, SIPCOT IT Park, Siruseri 603103, India Email: [email protected], [email protected] January 22, 2019 Published in Resonance 24(1), 87-114, January (2019) Abstract The classical three-body problem arose in an attempt to understand the effect of the Sun on the Moon’s Keplerian orbit around the Earth. It has attracted the attention of some of the best physicists and mathematicians and led to the discovery of chaos. We survey the three- body problem in its historical context and use it to introduce several ideas and techniques that have been developed to understand classical mechanical systems. Keywords: Kepler problem, three-body problem, celestial mechanics, classical dynamics, chaos, instabilities Contents 1 Introduction 2 2 Review of the Kepler problem3 3 The three-body problem 5 arXiv:1901.07289v1 [nlin.CD] 22 Jan 2019 4 Euler and Lagrange periodic solutions6 5 Restricted three-body problem8 6 Planar Euler three-body problem9 7 Some landmarks in the history of the 3-body problem 13 8 Geometrization of mechanics 17 9 Geometric approach to the planar 3-body problem 19 1 1 Introduction The three-body problem is one of the oldest problems in classical dynamics that continues to throw up surprises. It has challenged scientists from Newton’s time to the present. It arose in an attempt to understand the Sun’s effect on the motion of the Moon around the Earth. This was of much practical importance in marine navigation, where lunar tables were necessary to accurately determine longitude at sea (see Box 1).