2018 Mars Insight Mission Design and Navigation Overview
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MARS SCIENCE LABORATORY ORBIT DETERMINATION Gerhard L. Kruizinga(1)
MARS SCIENCE LABORATORY ORBIT DETERMINATION Gerhard L. Kruizinga(1), Eric D. Gustafson(2), Paul F. Thompson(3), David C. Jefferson(4), Tomas J. Martin-Mur(5), Neil A. Mottinger(6), Frederic J. Pelletier(7), and Mark S. Ryne(8) (1-8)Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Pasadena, California 91109, +1-818-354-7060, fGerhard.L.Kruizinga, edg, Paul.F.Thompson, David.C.Jefferson, tmur, Neil.A.Mottinger, Fred.Pelletier, [email protected] Abstract: This paper describes the orbit determination process, results and filter strategies used by the Mars Science Laboratory Navigation Team during cruise from Earth to Mars. The new atmospheric entry guidance system resulted in an orbit determination paradigm shift during final approach when compared to previous Mars lander missions. The evolving orbit determination filter strategies during cruise are presented. Furthermore, results of calibration activities of dynamical models are presented. The atmospheric entry interface trajectory knowledge was significantly better than the original requirements, which enabled the very precise landing in Gale Crater. Keywords: Mars Science Laboratory, Curiosity, Mars, Navigation, Orbit Determination 1. Introduction On August 6, 2012, the Mars Science Laboratory (MSL) and the Curiosity rover successful performed a precision landing in Gale Crater on Mars. A crucial part of the success was orbit determination (OD) during the cruise from Earth to Mars. The OD process involves determining the spacecraft state, predicting the future trajectory and characterizing the uncertainty associated with the predicted trajectory. This paper describes the orbit determination process, results, and unique challenges during the final approach phase. -

IMU/MCAV Integrated Navigation for the Powered Descent Phase Of
Overview of Chinese Current Efforts for Mars Probe Design Xiuqiang Jiang1,2, Ting Tao1,2 and Shuang Li1,2 1. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2. Space New Technology Laboratory, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China Email: [email protected], [email protected] Abstract Mars exploration activities have gathered scientific data and deepened the current understanding about the Martian evolution process and living environment. As a terrestrial planet, Mars is also an excellent proving ground of some innovative special-purpose aerospace technologies. In the U.S., Soviet Union (Russia), Europe, and India, missions sending spacecraft to explore Mars currently exist, and the first three have landed their spacecrafts on the surface of Mars. China has programmed five Mars landing missions in next 20 years, and some critical technologies for Mars landing mission have been studied beforehand. In this paper, we will report Chinese Mars exploration mission scenario and the latest progress in dynamics study and guidance navigation and control (GNC) system design for Chinese first Mars probe. Some elementary design rules and index will be described according to simulation experiments, analysis and survey. Several new coping strategies will be proposed to be competent for the challenges of the Mars entry descent and landing (EDL) dynamics process. Details of the work, the supporting data and preliminary conclusions of the investigation will be presented. Based on our current efforts, one candidate system configuration architecture of Chinese first Mars probe will be shown and elaborated in the end. United States launched the “Mars Pathfinder (MPF)” 1. -

Appendix 1: Venus Missions
Appendix 1: Venus Missions Sputnik 7 (USSR) Launch 02/04/1961 First attempted Venus atmosphere craft; upper stage failed to leave Earth orbit Venera 1 (USSR) Launch 02/12/1961 First attempted flyby; contact lost en route Mariner 1 (US) Launch 07/22/1961 Attempted flyby; launch failure Sputnik 19 (USSR) Launch 08/25/1962 Attempted flyby, stranded in Earth orbit Mariner 2 (US) Launch 08/27/1962 First successful Venus flyby Sputnik 20 (USSR) Launch 09/01/1962 Attempted flyby, upper stage failure Sputnik 21 (USSR) Launch 09/12/1962 Attempted flyby, upper stage failure Cosmos 21 (USSR) Launch 11/11/1963 Possible Venera engineering test flight or attempted flyby Venera 1964A (USSR) Launch 02/19/1964 Attempted flyby, launch failure Venera 1964B (USSR) Launch 03/01/1964 Attempted flyby, launch failure Cosmos 27 (USSR) Launch 03/27/1964 Attempted flyby, upper stage failure Zond 1 (USSR) Launch 04/02/1964 Venus flyby, contact lost May 14; flyby July 14 Venera 2 (USSR) Launch 11/12/1965 Venus flyby, contact lost en route Venera 3 (USSR) Launch 11/16/1965 Venus lander, contact lost en route, first Venus impact March 1, 1966 Cosmos 96 (USSR) Launch 11/23/1965 Possible attempted landing, craft fragmented in Earth orbit Venera 1965A (USSR) Launch 11/23/1965 Flyby attempt (launch failure) Venera 4 (USSR) Launch 06/12/1967 Successful atmospheric probe, arrived at Venus 10/18/1967 Mariner 5 (US) Launch 06/14/1967 Successful flyby 10/19/1967 Cosmos 167 (USSR) Launch 06/17/1967 Attempted atmospheric probe, stranded in Earth orbit Venera 5 (USSR) Launch 01/05/1969 Returned atmospheric data for 53 min on 05/16/1969 M. -
Human Exploration of Mars Design Reference Architecture 5.0
July 2009 “We are all . children of this universe. Not just Earth, or Mars, or this System, but the whole grand fireworks. And if we are interested in Mars at all, it is only because we wonder over our past and worry terribly about our possible future.” — Ray Bradbury, 'Mars and the Mind of Man,' 1973 Cover Art: An artist’s concept depicting one of many potential Mars exploration strategies. In this approach, the strengths of combining a central habitat with small pressurized rovers that could extend the exploration range of the crew from the outpost are assessed. Rawlings 2007. NASA/SP–2009–566 Human Exploration of Mars Design Reference Architecture 5.0 Mars Architecture Steering Group NASA Headquarters Bret G. Drake, editor NASA Johnson Space Center, Houston, Texas July 2009 ACKNOWLEDGEMENTS The individuals listed in the appendix assisted in the generation of the concepts as well as the descriptions, images, and data described in this report. Specific contributions to this document were provided by Dave Beaty, Stan Borowski, Bob Cataldo, John Charles, Cassie Conley, Doug Craig, Bret Drake, John Elliot, Chad Edwards, Walt Engelund, Dean Eppler, Stewart Feldman, Jim Garvin, Steve Hoffman, Jeff Jones, Frank Jordan, Sheri Klug, Joel Levine, Jack Mulqueen, Gary Noreen, Hoppy Price, Shawn Quinn, Jerry Sanders, Jim Schier, Lisa Simonsen, George Tahu, and Abhi Tripathi. Available from: NASA Center for AeroSpace Information National Technical Information Service 7115 Standard Drive 5285 Port Royal Road Hanover, MD 21076-1320 Springfield, VA 22161 Phone: 301-621-0390 or 703-605-6000 Fax: 301-621-0134 This report is also available in electronic form at http://ston.jsc.nasa.gov/collections/TRS/ CONTENTS 1 Introduction ...................................................................................................................... -
Managing Software Development – the Hidden Risk * Dr
Managing Software Development – The Hidden Risk * Dr. Steve Jolly Sensing & Exploration Systems Lockheed Martin Space Systems Company *Based largely on the work: “Is Software Broken?” by Steve Jolly, NASA ASK Magazine, Spring 2009; and the IEEE Fourth International Conference of System of Systems Engineering as “System of Systems in Space 1 Exploration: Is Software Broken?”, Steve Jolly, Albuquerque, New Mexico June 1, 2009 Brief history of spacecraft development • Example of the Mars Exploration Program – Danger – Real-time embedded systems challenge – Fault protection 2 Robotic Mars Exploration 2011 Mars Exploration Program Search: Search: Search: Determine: Characterize: Determine: Aqueous Subsurface Evidence for water Global Extent Subsurface Bio Potential Minerals Ice Found Found of Habitable Ice of Site 3 Found Environments Found In Work Image Credits: NASA/JPL Mars: Easy to Become Infamous … 1. [Unnamed], USSR, 10/10/60, Mars flyby, did not reach Earth orbit 2. [Unnamed], USSR, 10/14/60, Mars flyby, did not reach Earth orbit 3. [Unnamed], USSR, 10/24/62, Mars flyby, achieved Earth orbit only 4. Mars 1, USSR, 11/1/62, Mars flyby, radio failed 5. [Unnamed], USSR, 11/4/62, Mars flyby, achieved Earth orbit only 6. Mariner 3, U.S., 11/5/64, Mars flyby, shroud failed to jettison 7. Mariner 4, U.S. 11/28/64, first successful Mars flyby 7/14/65 8. Zond 2, USSR, 11/30/64, Mars flyby, passed Mars radio failed, no data 9. Mariner 6, U.S., 2/24/69, Mars flyby 7/31/69, returned 75 photos 10. Mariner 7, U.S., 3/27/69, Mars flyby 8/5/69, returned 126 photos 11. -
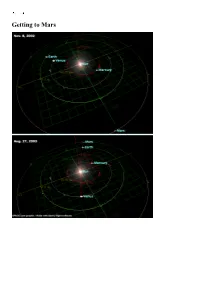
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Space Vehicle Conceptual Design Blue Team March 20, 2021
Hephaestus: Space Vehicle Conceptual Design Blue team March 20, 2021 Connor Cruickshank, Joel Lundahl, Birgir Steinn Hermannsson, Greta Tartaglia M.Sc. students, KTH Royal Institute of Technology, Stockholm, Sweden Abstract—A hypothetical contest has been issued to summit ms Structural mass Olympus Mons. This report details a conceptual design of a space P Power vehicle intended for that purpose. Functional requirements of the p Combustion chamber pressure vehicle were defined, and the primary subsystems identified. The 02 SpaceX Starship was chosen to serve as a design baseline and pe Exhaust gas exit pressure a comparison of suitable launch vehicles was made. Subsystems S Drag surface such as propulsion, reaction control, power generation, thermal T Thrust management and radiation shielding were considered, as well as ue Exhaust gas exit velocity interior design of the space vehicle and its protection measures W Weight for Mars entry and activities. The consequences of an engine-out scenario were studied. t Metric tonne The Starship launch system was deemed the most suitable launch vehicle candidate. Six Raptor engines were selected for the spacecraft main propulsion system, with 8 smaller thrusters I. INTRODUCTION for reaction control. A radiator mass of 890 kg was estimated In the year 2038 a challenge was issued for a team of for the thermal management system, and lithium metal hydride was determined an adequate radiation shielding material for the pioneers to be the first to reach the peak of Olympus Mons, the crew quarters. A radiation shelter was integrated into the pantry, highest mountain in the solar system. The reward for the first to and layouts of the crew quarters and cargo bay were prepared. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -

Development of Supersonic Retropropulsion for Future Mars Entry, Descent, and Landing Systems
JOURNAL OF SPACECRAFT AND ROCKETS Vol. 51, No. 3, May–June 2014 Development of Supersonic Retropropulsion for Future Mars Entry, Descent, and Landing Systems Karl T. Edquist∗ and Ashley M. Korzun† NASA Langley Research Center, Hampton, Virginia 23681 Artem A. Dyakonov‡ Blue Origin, LLC, Kent, Washington 98032 Joseph W. Studak§ NASA Johnson Space Center, Houston, Texas 77058 Devin M. Kipp¶ Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, 91109 and Ian C. Dupzyk** Lunexa, LLC, San Francisco, California 94105 DOI: 10.2514/1.A32715 Recent studies have concluded that Viking-era entry system deceleration technologies are extremely difficult to scale for progressively larger payloads (tens of metric tons) required for human Mars exploration. Supersonic retropropulsion is one of a few developing technologies that may enable future human-scale Mars entry systems. However, in order to be considered as a viable technology for future missions, supersonic retropropulsion will require significant maturation beyond its current state. This paper proposes major milestones for advancing the component technologies of supersonic retropropulsion such that it can be reliably used on Mars technology demonstration missions to land larger payloads than are currently possible using Viking-based systems. The development roadmap includes technology gates that are achieved through ground-based testing and high-fidelity analysis, culminating with subscale flight testing in Earth’s atmosphere that demonstrates stable and controlled flight. The component technologies requiring advancement include large engines (100s of kilonewtons of thrust) capable of throttling and gimbaling, entry vehicle aerodynamics and aerothermodynamics modeling, entry vehicle stability and control methods, reference vehicle systems engineering and analyses, and high-fidelity models for entry trajectory simulations. -
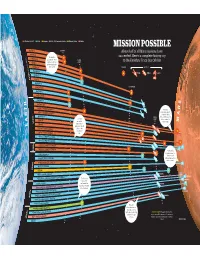
MISSION POSSIBLE KORABL 4 LAUNCH About Half of All Mars Missions Have
Russia/U.S.S.R. U.S. Japan U.K./ESA member states Russia/China India MISSION POSSIBLE KORABL 4 LAUNCH About half of all Mars missions have KORABL 5 ) The frst U.S. succeeded. Here’s a complete history, up s KORAB e L 11 to Mars t spacecraft EARTH a to the ExoMars Trace Gas Orbiter d mysteriously lost ORBIT MARS 1 h power eight hours c n KORA after launch u BL 13 FAILURE SUCCESS a L ( MARINER 3 s Flyby Orbiter Lander 0 MA 6 RINER 4 9 1 ZOND 2 MARINER 6 IN TRANSIT MARS 1969A MARINER 7 MARS 1969B MARINER 8 S H KOSMOS 419 MA R T RS 2 ORBITER/LANDER The frst man-made object MARS 3 ORBITER/LAN DER A R to land on Mars. s MARINER 9 MARS But contact was lost 0 The frst 7 ORBIT 20 seconds after A MARS 9 4 successful touchdown M 1 Mars surface MARS 5 E exploration found all elements MARS 6 FLYBY/LAND ER essential to MARS 7 FLYBY/LANDER life VIKING 1 ORBITER/LANDER VIKING 2 ORBITER/LANDER s 0 PHOBOS 1 ORBITER/LANDER 8 9 PHOBOS 2 ORBITER/LANDER 1 Pathfinder’s Sojourner was the MARS OBSERVER frst wheeled MARS GLOBAL SURVEYOR vehicle deployed on another planet s MARS 96 ORBITER/LANDER 0 9 MARS PATHFINDER 9 1 NOZOMI MARS CLIMATE ORBITER ONGOING ONGOING 2 PROBES/MARS POLAR LANDER The Phoenix ONGOING DEEP SPACE ONGOING lander frst MARS ODYSSEY confrmed the ONGOING presence of water /BEAGLE 2 LANDER MARS EXPRESS ORBITER in soil samples s RIT MARS EXPLORATION ROVER–SPI ONGOING 0 0 OVER–OPPORTUNITY 0 MARS EXPLORATION R ONGOING 2 ITER MARS RECONNAISSANCE ORB ENIX MARS LANDER PHO Curiosity descended on the -GRUNT/YINGHUO-1 PHOBOS frst “sky crane,” a s B/CURIOSITY highly precise landing DID YOU KNOW? The early missions had 0 MARS SCIENCE LA 1 system for large up to seven diferent names. -

Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry
10th AIAA/ASME Joint Thermophysics and Heat Transfer Conference AIAA 2010-5052 28 June - 1 July 2010, Chicago, Illinois Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry Joseph A. Garcia1 , James L. Brown2 , David J. Kinney1 and Jeffrey V. Bowles1 NASA Ames Research Center, Moffett Field, CA 94035, USA and Loc C. Huynh3. Xun J. Jiang3, Eric Lau3, and Ian C. Dupzyk4 ELORET Corporation, Moffett Field, CA 94035, USA As NASA continues to make plans for future robotic precursor and eventual human missions to Mars, the need to characterize and develop designs for entry vehicles capable of delivering large masses to the surface of Mars will persist. In combination with this, NASA has recognized that the current heritage technology for Mars’ Entry Decent and Landing (EDL) does not have the capability to land the required payload masses. Both the Thermal Protection System (TPS) and the Descent/Landing systems require new design approaches. Because of these needs, NASA has performed an Entry, Descent and Landing Systems Analysis (EDL-SA) study for high mass exploration and science missions to identify key enabling technology areas for further investment. One key technology area identified includes rigid aeroshell shapes for aerodynamic performance and controllability. In this investigation, a system optimization study of alternative aeroshell shapes for Mars exploration class payloads of approximately 40 metric tons has been conducted. This system optimization is accomplished using a Multi-disciplinary Design Optimization (MDO) framework which accounts for the aeroshell shape, trajectory, thermal protection system, and vehicle subsystem closure along with a Multi Objective Genetic Algorithm (MOGA) for the initial shape exploration. -

India to Pull Ahead of China with Mangalyaan's Success
India is set to join the elite list of members after the US, Russia and Europe to have successfully launched termed successful only after the spacecraft manages to insert itself into the Mars orbit on September 21, INDIA TO PULL a spacecraft to Mars. The attempts made by Japan and China (using a Russian rocket) have failed so far. 2014. China had successfully sent two spacecraft, Chang’e 1 and Chang’e 2, into the lunar orbit and is India is banking on its most-successful PSLV rocket, which had put its first spacecraft, Chandrayaan-1, preparing to send a landing and rover mission, Chang’e 3, to the moon in December 2013. Here is a look AHEAD OF into the lunar orbit in 2008. The same rocket flew Mangalyaan on Tuesday. However, the mission will be at all the missions to Mars: LAUNCH DATE Mar 2 LAUNCH DATE Aug. 4 LAUNCH DATE June 10 COUNTRYEurope COUNTRY US CHINA WITH COUNTRYUS LAUNCH DATE May 30 MISSION GOAL Mars SPACECRAFT SPACECRAFT Rosetta SPACECRAFT Phoenix COUNTRY US orbit LAUNCH DATE Mars Exploration Rover A (Spirit) MISSION GOAL Comet MISSION GOAL Mars MANGALYAAN'S SPACECRAFT COMMENTS Aug 5 MISSION GOAL Rover landing COMMENTS Success landing COMMENTS Mariner-9 (Mariner I) Success COUNTRY Success COMMENTS Success LAUNCH DATE LAUNCH DATE Jul 18 LAUNCH DATE USSR LAUNCH DATE LAUNCH DATE LAUNCH DATE SUCCESS LAUNCH DATE Aug. 12 LAUNCH DATE Feb 25 SPACECRAFT Aug 20 Sep 9 Nov 7 LAUNCH DATE LAUNCH DATE July 7 COUNTRY USSR Dec 4 LAUNCH DATE June 2 COUNTRY US Nov.