MARS SCIENCE LABORATORY ORBIT DETERMINATION Gerhard L. Kruizinga(1)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

IMU/MCAV Integrated Navigation for the Powered Descent Phase Of
Overview of Chinese Current Efforts for Mars Probe Design Xiuqiang Jiang1,2, Ting Tao1,2 and Shuang Li1,2 1. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2. Space New Technology Laboratory, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China Email: [email protected], [email protected] Abstract Mars exploration activities have gathered scientific data and deepened the current understanding about the Martian evolution process and living environment. As a terrestrial planet, Mars is also an excellent proving ground of some innovative special-purpose aerospace technologies. In the U.S., Soviet Union (Russia), Europe, and India, missions sending spacecraft to explore Mars currently exist, and the first three have landed their spacecrafts on the surface of Mars. China has programmed five Mars landing missions in next 20 years, and some critical technologies for Mars landing mission have been studied beforehand. In this paper, we will report Chinese Mars exploration mission scenario and the latest progress in dynamics study and guidance navigation and control (GNC) system design for Chinese first Mars probe. Some elementary design rules and index will be described according to simulation experiments, analysis and survey. Several new coping strategies will be proposed to be competent for the challenges of the Mars entry descent and landing (EDL) dynamics process. Details of the work, the supporting data and preliminary conclusions of the investigation will be presented. Based on our current efforts, one candidate system configuration architecture of Chinese first Mars probe will be shown and elaborated in the end. United States launched the “Mars Pathfinder (MPF)” 1. -

Five Aerojet Boosters Set to Lift New Horizons Spacecraft
January 15, 2006 Five Aerojet Boosters Set to Lift New Horizons Spacecraft Aerojet Propulsion Will Support Both Launch Vehicle and Spacecraft for Mission to Pluto SACRAMENTO, Calif., Jan. 15 /PRNewswire/ -- Aerojet, a GenCorp Inc. (NYSE: GY) company, will provide five solid rocket boosters for the launch vehicle and a propulsion system for the spacecraft when a Lockheed Martin Atlas® V launches the Pluto New Horizons spacecraft January 17 from Cape Canaveral, AFB. The launch window opens at 1:24 p.m. EST on January 17 and extends through February 14. The New Horizons mission, dubbed by NASA as the "first mission to the last planet," will study Pluto and its moon, Charon, in detail during a five-month- long flyby encounter. Pluto is the solar system's most distant planet, averaging 3.6 billion miles from the sun. Aerojet's solid rocket boosters (SRBs), each 67-feet long and providing an average of 250,000 pounds of thrust, will provide the necessary added thrust for the New Horizons mission. The SRBs have flown in previous vehicle configurations using two and three boosters; this is the first flight utilizing the five boosters. Additionally, 12 Aerojet monopropellant (hydrazine) thrusters on the Atlas V Centaur upper stage will provide roll, pitch, and yaw control settling burns for the launch vehicle main engines. Aerojet also supplies 8 retro rockets for Atlas Centaur separation. Aerojet also provided the spacecraft propulsion system, comprised of a propellant tank, 16 thrusters and various other components, which will control pointing and navigation for the spacecraft on its journey and during encounters with Pluto- Charon and, as part of a possible extended mission, to more distant, smaller objects in the Kuiper Belt. -

A Possible Flyby Anomaly for Juno at Jupiter
A possible flyby anomaly for Juno at Jupiter L. Acedo,∗ P. Piqueras and J. A. Mora˜no Instituto Universitario de Matem´atica Multidisciplinar, Building 8G, 2o Floor, Camino de Vera, Universitat Polit`ecnica de Val`encia, Valencia, Spain December 14, 2017 Abstract In the last decades there have been an increasing interest in im- proving the accuracy of spacecraft navigation and trajectory data. In the course of this plan some anomalies have been found that cannot, in principle, be explained in the context of the most accurate orbital models including all known effects from classical dynamics and general relativity. Of particular interest for its puzzling nature, and the lack of any accepted explanation for the moment, is the flyby anomaly discov- ered in some spacecraft flybys of the Earth over the course of twenty years. This anomaly manifest itself as the impossibility of matching the pre and post-encounter Doppler tracking and ranging data within a single orbit but, on the contrary, a difference of a few mm/s in the asymptotic velocities is required to perform the fitting. Nevertheless, no dedicated missions have been carried out to eluci- arXiv:1711.08893v2 [astro-ph.EP] 13 Dec 2017 date the origin of this phenomenon with the objective either of revising our understanding of gravity or to improve the accuracy of spacecraft Doppler tracking by revealing a conventional origin. With the occasion of the Juno mission arrival at Jupiter and the close flybys of this planet, that are currently been performed, we have developed an orbital model suited to the time window close to the ∗E-mail: [email protected] 1 perijove. -

Planetary Science
Mission Directorate: Science Theme: Planetary Science Theme Overview Planetary Science is a grand human enterprise that seeks to discover the nature and origin of the celestial bodies among which we live, and to explore whether life exists beyond Earth. The scientific imperative for Planetary Science, the quest to understand our origins, is universal. How did we get here? Are we alone? What does the future hold? These overarching questions lead to more focused, fundamental science questions about our solar system: How did the Sun's family of planets, satellites, and minor bodies originate and evolve? What are the characteristics of the solar system that lead to habitable environments? How and where could life begin and evolve in the solar system? What are the characteristics of small bodies and planetary environments and what potential hazards or resources do they hold? To address these science questions, NASA relies on various flight missions, research and analysis (R&A) and technology development. There are seven programs within the Planetary Science Theme: R&A, Lunar Quest, Discovery, New Frontiers, Mars Exploration, Outer Planets, and Technology. R&A supports two operating missions with international partners (Rosetta and Hayabusa), as well as sample curation, data archiving, dissemination and analysis, and Near Earth Object Observations. The Lunar Quest Program consists of small robotic spacecraft missions, Missions of Opportunity, Lunar Science Institute, and R&A. Discovery has two spacecraft in prime mission operations (MESSENGER and Dawn), an instrument operating on an ESA Mars Express mission (ASPERA-3), a mission in its development phase (GRAIL), three Missions of Opportunities (M3, Strofio, and LaRa), and three investigations using re-purposed spacecraft: EPOCh and DIXI hosted on the Deep Impact spacecraft and NExT hosted on the Stardust spacecraft. -

Space Vehicle Conceptual Design Blue Team March 20, 2021
Hephaestus: Space Vehicle Conceptual Design Blue team March 20, 2021 Connor Cruickshank, Joel Lundahl, Birgir Steinn Hermannsson, Greta Tartaglia M.Sc. students, KTH Royal Institute of Technology, Stockholm, Sweden Abstract—A hypothetical contest has been issued to summit ms Structural mass Olympus Mons. This report details a conceptual design of a space P Power vehicle intended for that purpose. Functional requirements of the p Combustion chamber pressure vehicle were defined, and the primary subsystems identified. The 02 SpaceX Starship was chosen to serve as a design baseline and pe Exhaust gas exit pressure a comparison of suitable launch vehicles was made. Subsystems S Drag surface such as propulsion, reaction control, power generation, thermal T Thrust management and radiation shielding were considered, as well as ue Exhaust gas exit velocity interior design of the space vehicle and its protection measures W Weight for Mars entry and activities. The consequences of an engine-out scenario were studied. t Metric tonne The Starship launch system was deemed the most suitable launch vehicle candidate. Six Raptor engines were selected for the spacecraft main propulsion system, with 8 smaller thrusters I. INTRODUCTION for reaction control. A radiator mass of 890 kg was estimated In the year 2038 a challenge was issued for a team of for the thermal management system, and lithium metal hydride was determined an adequate radiation shielding material for the pioneers to be the first to reach the peak of Olympus Mons, the crew quarters. A radiation shelter was integrated into the pantry, highest mountain in the solar system. The reward for the first to and layouts of the crew quarters and cargo bay were prepared. -

Juno Observations of Large-Scale Compressions of Jupiter's Dawnside
PUBLICATIONS Geophysical Research Letters RESEARCH LETTER Juno observations of large-scale compressions 10.1002/2017GL073132 of Jupiter’s dawnside magnetopause Special Section: Daniel J. Gershman1,2 , Gina A. DiBraccio2,3 , John E. P. Connerney2,4 , George Hospodarsky5 , Early Results: Juno at Jupiter William S. Kurth5 , Robert W. Ebert6 , Jamey R. Szalay6 , Robert J. Wilson7 , Frederic Allegrini6,7 , Phil Valek6,7 , David J. McComas6,8,9 , Fran Bagenal10 , Key Points: Steve Levin11 , and Scott J. Bolton6 • Jupiter’s dawnside magnetosphere is highly compressible and subject to 1Department of Astronomy, University of Maryland, College Park, College Park, Maryland, USA, 2NASA Goddard Spaceflight strong Alfvén-magnetosonic mode Center, Greenbelt, Maryland, USA, 3Universities Space Research Association, Columbia, Maryland, USA, 4Space Research coupling 5 • Magnetospheric compressions may Corporation, Annapolis, Maryland, USA, Department of Physics and Astronomy, University of Iowa, Iowa City, Iowa, USA, 6 7 enhance reconnection rates and Southwest Research Institute, San Antonio, Texas, USA, Department of Physics and Astronomy, University of Texas at San increase mass transport across the Antonio, San Antonio, Texas, USA, 8Department of Astrophysical Sciences, Princeton University, Princeton, New Jersey, USA, magnetopause 9Office of the VP for the Princeton Plasma Physics Laboratory, Princeton University, Princeton, New Jersey, USA, • Total pressure increases inside the 10Laboratory for Atmospheric and Space Physics, University of Colorado -

Dawn Mission to Vesta and Ceres Symbiosis Between Terrestrial Observations and Robotic Exploration
Earth Moon Planet (2007) 101:65–91 DOI 10.1007/s11038-007-9151-9 Dawn Mission to Vesta and Ceres Symbiosis between Terrestrial Observations and Robotic Exploration C. T. Russell Æ F. Capaccioni Æ A. Coradini Æ M. C. De Sanctis Æ W. C. Feldman Æ R. Jaumann Æ H. U. Keller Æ T. B. McCord Æ L. A. McFadden Æ S. Mottola Æ C. M. Pieters Æ T. H. Prettyman Æ C. A. Raymond Æ M. V. Sykes Æ D. E. Smith Æ M. T. Zuber Received: 21 August 2007 / Accepted: 22 August 2007 / Published online: 14 September 2007 Ó Springer Science+Business Media B.V. 2007 Abstract The initial exploration of any planetary object requires a careful mission design guided by our knowledge of that object as gained by terrestrial observers. This process is very evident in the development of the Dawn mission to the minor planets 1 Ceres and 4 Vesta. This mission was designed to verify the basaltic nature of Vesta inferred both from its reflectance spectrum and from the composition of the howardite, eucrite and diogenite meteorites believed to have originated on Vesta. Hubble Space Telescope observations have determined Vesta’s size and shape, which, together with masses inferred from gravitational perturbations, have provided estimates of its density. These investigations have enabled the Dawn team to choose the appropriate instrumentation and to design its orbital operations at Vesta. Until recently Ceres has remained more of an enigma. Adaptive-optics and HST observations now have provided data from which we can begin C. T. Russell (&) IGPP & ESS, UCLA, Los Angeles, CA 90095-1567, USA e-mail: [email protected] F. -

Development of Supersonic Retropropulsion for Future Mars Entry, Descent, and Landing Systems
JOURNAL OF SPACECRAFT AND ROCKETS Vol. 51, No. 3, May–June 2014 Development of Supersonic Retropropulsion for Future Mars Entry, Descent, and Landing Systems Karl T. Edquist∗ and Ashley M. Korzun† NASA Langley Research Center, Hampton, Virginia 23681 Artem A. Dyakonov‡ Blue Origin, LLC, Kent, Washington 98032 Joseph W. Studak§ NASA Johnson Space Center, Houston, Texas 77058 Devin M. Kipp¶ Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, 91109 and Ian C. Dupzyk** Lunexa, LLC, San Francisco, California 94105 DOI: 10.2514/1.A32715 Recent studies have concluded that Viking-era entry system deceleration technologies are extremely difficult to scale for progressively larger payloads (tens of metric tons) required for human Mars exploration. Supersonic retropropulsion is one of a few developing technologies that may enable future human-scale Mars entry systems. However, in order to be considered as a viable technology for future missions, supersonic retropropulsion will require significant maturation beyond its current state. This paper proposes major milestones for advancing the component technologies of supersonic retropropulsion such that it can be reliably used on Mars technology demonstration missions to land larger payloads than are currently possible using Viking-based systems. The development roadmap includes technology gates that are achieved through ground-based testing and high-fidelity analysis, culminating with subscale flight testing in Earth’s atmosphere that demonstrates stable and controlled flight. The component technologies requiring advancement include large engines (100s of kilonewtons of thrust) capable of throttling and gimbaling, entry vehicle aerodynamics and aerothermodynamics modeling, entry vehicle stability and control methods, reference vehicle systems engineering and analyses, and high-fidelity models for entry trajectory simulations. -

Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry
10th AIAA/ASME Joint Thermophysics and Heat Transfer Conference AIAA 2010-5052 28 June - 1 July 2010, Chicago, Illinois Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry Joseph A. Garcia1 , James L. Brown2 , David J. Kinney1 and Jeffrey V. Bowles1 NASA Ames Research Center, Moffett Field, CA 94035, USA and Loc C. Huynh3. Xun J. Jiang3, Eric Lau3, and Ian C. Dupzyk4 ELORET Corporation, Moffett Field, CA 94035, USA As NASA continues to make plans for future robotic precursor and eventual human missions to Mars, the need to characterize and develop designs for entry vehicles capable of delivering large masses to the surface of Mars will persist. In combination with this, NASA has recognized that the current heritage technology for Mars’ Entry Decent and Landing (EDL) does not have the capability to land the required payload masses. Both the Thermal Protection System (TPS) and the Descent/Landing systems require new design approaches. Because of these needs, NASA has performed an Entry, Descent and Landing Systems Analysis (EDL-SA) study for high mass exploration and science missions to identify key enabling technology areas for further investment. One key technology area identified includes rigid aeroshell shapes for aerodynamic performance and controllability. In this investigation, a system optimization study of alternative aeroshell shapes for Mars exploration class payloads of approximately 40 metric tons has been conducted. This system optimization is accomplished using a Multi-disciplinary Design Optimization (MDO) framework which accounts for the aeroshell shape, trajectory, thermal protection system, and vehicle subsystem closure along with a Multi Objective Genetic Algorithm (MOGA) for the initial shape exploration. -

(PEPSSI) on the New Horizons Mission Ralph L
The Pluto Energetic Particle Spectrometer Science Investigation (PEPSSI) on the New Horizons Mission Ralph L. McNutt, Jr.1,6, Stefano A. Livi2, Reid S. Gurnee1, Matthew E. Hill1, Kim A. Cooper1, G. Bruce Andrews1, Edwin P. Keath3, Stamatios M. Krimigis1,4, Donald G. Mitchell1, Barry Tossman3, Fran Bagenal5, John D. Boldt1, Walter Bradley3, William S. Devereux1, George C. Ho1, Stephen E. Jaskulek1, Thomas W. LeFevere1, Horace Malcom1, Geoffrey A. Marcus1, John R. Hayes1, G. Ty Moore1, Bruce D. Williams, Paul Wilson IV3, L. E. Brown1, M. Kusterer1, J. Vandegriff1 1The Johns Hopkins University Applied Physics Laboratory, 11100 Johns Hopkins Road, Laurel, MD 20723, USA 2Southwest Research Institute, 6220 Culebra Road, San Antonio, TX 78228, USA 3The Johns Hopkins University Applied Physics Laboratory, retired 4 Academy of Athens, 28 Panapistimiou, 10679 Athens, Greece 5The University of Colorado, Boulder, CO 80309, USA 6443-778-5435, 443-778-0386, [email protected] The Pluto Energetic Particle Spectrometer Science Investigation (PEPSSI) comprises the hardware and accompanying science investigation on the New Horizons spacecraft to measure pick-up ions from Pluto’s outgassing atmosphere. To the extent that Pluto retains its characteristics similar to those of a “heavy comet” as detected in stellar occultations since the early 1980s, these measurements will characterize the neutral atmosphere of Pluto while providing a consistency check on the atmospheric escape rate at the encounter epoch with that deduced from the atmospheric structure at lower altitudes by the ALICE, REX, and SWAP experiments on New Horizons. In addition, PEPSSI will characterize any extended ionosphere and solar wind interaction while also characterizing the energetic particle environment of Pluto, Charon, and their associated system. -

New Vlt/Naco Images Have Been Obtained of the Atmosphere and Surface of Titan, the Largest Moon in the Saturnian System
NNEWEW VLVLT/NACOT/NACO IIMAGESMAGES OFOF TTITITANAN AS A COMPLEMENT TO THE NASA/ESA CASSINI/HUYGENS MISSION, NEW VLT/NACO IMAGES HAVE BEEN OBTAINED OF THE ATMOSPHERE AND SURFACE OF TITAN, THE LARGEST MOON IN THE SATURNIAN SYSTEM. (BASED ON ESO PRESS PHOTOS 08A-C/04 AND ESO PRESS RELEASE 09/04) ITAN, THE LARGEST MOON OF Saturn was discovered by Dutch astronomer Christian Huygens in 1655 and certain- ly deserves its name. With a TdiameterT of no less than 5,150 km, it is larg- er than Mercury and twice as large as Pluto. It is unique in having a hazy atmosphere of nitrogen, methane and oily hydrocarbons. Although it was explored in some detail by the NASA Voyager missions, many aspects of the atmosphere and surface still remain unknown. Thus, the existence of seasonal or diurnal phenomena, the presence of clouds, the surface composition and topography are still under debate. There have even been speculations that some kind of primitive life (now possibly extinct) may be found on Titan. Titan is the main target of the NASA/ESA Cassini/Huygens mission, Figure 1 shows Titan (apparent visual magnitude 8.05, apparent diameter 0.87 arcsec) as launched in 1997 and scheduled to arrive at observed with the NAOS/CONICA instrument at VLT Yepun on November 20, 25 and 26, 2002, between 6.00 UT and 9.00 UT. The median seeing values were 1.1 arcsec and 1.5 arcsec Saturn on July 1, 2004. The ESA Huygens respectively for the 20th and 25th. Deconvoluted (“sharpened”) images of Titan are shown probe is designed to enter the atmosphere of through 5 different narrow-band filters - they allow to probe in some detail structures at differ- Titan in early 2005, and to descend by para- ent altitudes and on the surface. -
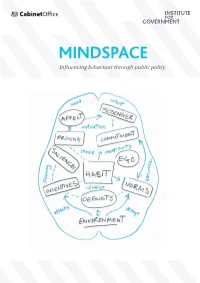
MINDSPACE: Influencing Behaviour Through Public
MINDSPACE Influencing behaviour through public policy 2 Discussion document – not a statement of government policy Contents Foreword 4 Executive Summary 7 Introduction: Understanding why we act as we do 11 MINDSPACE: A user‟s guide to what affects our behaviour 18 Examples of MINDSPACE in public policy 29 Safer communities 30 The good society 36 Healthy and prosperous lives 42 Applying MINDSPACE to policy-making 49 Public permission and personal responsibility 63 Conclusions and future challenges 73 Annexes 80-84 MINDSPACE diagram 80 New possible approaches to current policy problems 81 New frontiers of behaviour change: Insight from experts 83 References 85 Discussion document – not a statement of government policy 3 Foreword Influencing people‟s behaviour is nothing new to Government, which has often used tools such as legislation, regulation or taxation to achieve desired policy outcomes. But many of the biggest policy challenges we are now facing – such as the increase in people with chronic health conditions – will only be resolved if we are successful in persuading people to change their behaviour, their lifestyles or their existing habits. Fortunately, over the last decade, our understanding of influences on behaviour has increased significantly and this points the way to new approaches and new solutions. So whilst behavioural theory has already been deployed to good effect in some areas, it has much greater potential to help us. To realise that potential, we have to build our capacity and ensure that we have a sophisticated understanding of what does influence behaviour. This report is an important step in that direction because it shows how behavioural theory could help achieve better outcomes for citizens, either by complementing more established policy tools, or by suggesting more innovative interventions.