PHYS 101 Lecture 13 - Rotational Kinematics 13 - 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Simple Harmonic Motion
[SHIVOK SP211] October 30, 2015 CH 15 Simple Harmonic Motion I. Oscillatory motion A. Motion which is periodic in time, that is, motion that repeats itself in time. B. Examples: 1. Power line oscillates when the wind blows past it 2. Earthquake oscillations move buildings C. Sometimes the oscillations are so severe, that the system exhibiting oscillations break apart. 1. Tacoma Narrows Bridge Collapse "Gallopin' Gertie" a) http://www.youtube.com/watch?v=j‐zczJXSxnw II. Simple Harmonic Motion A. http://www.youtube.com/watch?v=__2YND93ofE Watch the video in your spare time. This professor is my teaching Idol. B. In the figure below snapshots of a simple oscillatory system is shown. A particle repeatedly moves back and forth about the point x=0. Page 1 [SHIVOK SP211] October 30, 2015 C. The time taken for one complete oscillation is the period, T. In the time of one T, the system travels from x=+x , to –x , and then back to m m its original position x . m D. The velocity vector arrows are scaled to indicate the magnitude of the speed of the system at different times. At x=±x , the velocity is m zero. E. Frequency of oscillation is the number of oscillations that are completed in each second. 1. The symbol for frequency is f, and the SI unit is the hertz (abbreviated as Hz). 2. It follows that F. Any motion that repeats itself is periodic or harmonic. G. If the motion is a sinusoidal function of time, it is called simple harmonic motion (SHM). -
Chapter 10: Elasticity and Oscillations
Chapter 10 Lecture Outline 1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Chapter 10: Elasticity and Oscillations •Elastic Deformations •Hooke’s Law •Stress and Strain •Shear Deformations •Volume Deformations •Simple Harmonic Motion •The Pendulum •Damped Oscillations, Forced Oscillations, and Resonance 2 §10.1 Elastic Deformation of Solids A deformation is the change in size or shape of an object. An elastic object is one that returns to its original size and shape after contact forces have been removed. If the forces acting on the object are too large, the object can be permanently distorted. 3 §10.2 Hooke’s Law F F Apply a force to both ends of a long wire. These forces will stretch the wire from length L to L+L. 4 Define: L The fractional strain L change in length F Force per unit cross- stress A sectional area 5 Hooke’s Law (Fx) can be written in terms of stress and strain (stress strain). F L Y A L YA The spring constant k is now k L Y is called Young’s modulus and is a measure of an object’s stiffness. Hooke’s Law holds for an object to a point called the proportional limit. 6 Example (text problem 10.1): A steel beam is placed vertically in the basement of a building to keep the floor above from sagging. The load on the beam is 5.8104 N and the length of the beam is 2.5 m, and the cross-sectional area of the beam is 7.5103 m2. -

The Effect of Spring Mass on the Oscillation Frequency
The Effect of Spring Mass on the Oscillation Frequency Scott A. Yost University of Tennessee February, 2002 The purpose of this note is to calculate the effect of the spring mass on the oscillation frequency of an object hanging at the end of a spring. The goal is to find the limitations to a frequently-quoted rule that 1/3 the mass of the spring should be added to to the mass of the hanging object. This calculation was prompted by a student laboratory exercise in which it is normally seen that the frequency is somewhat lower than this rule would predict. Consider a mass M hanging from a spring of unstretched length l, spring constant k, and mass m. If the mass of the spring is neglected, the oscillation frequency would be ω = k/M. The quoted rule suggests that the effect of the spring mass would beq to replace M by M + m/3 in the equation for ω. This result can be found in some introductory physics textbooks, including, for example, Sears, Zemansky and Young, University Physics, 5th edition, sec. 11-5. The derivation assumes that all points along the spring are displaced linearly from their equilibrium position as the spring oscillates. This note will examine more general cases for the masses, including the limit M = 0. An appendix notes how the linear oscillation assumption breaks down when the spring mass becomes large. Let the positions along the unstretched spring be labeled by x, running from 0 to L, with 0 at the top of the spring, and L at the bottom, where the mass M is hanging. -

The Harmonic Oscillator
Appendix A The Harmonic Oscillator Properties of the harmonic oscillator arise so often throughout this book that it seemed best to treat the mathematics involved in a separate Appendix. A.1 Simple Harmonic Oscillator The harmonic oscillator equation dates to the time of Newton and Hooke. It follows by combining Newton’s Law of motion (F = Ma, where F is the force on a mass M and a is its acceleration) and Hooke’s Law (which states that the restoring force from a compressed or extended spring is proportional to the displacement from equilibrium and in the opposite direction: thus, FSpring =−Kx, where K is the spring constant) (Fig. A.1). Taking x = 0 as the equilibrium position and letting the force from the spring act on the mass: d2x M + Kx = 0. (A.1) dt2 2 = Dividing by the mass and defining ω0 K/M, the equation becomes d2x + ω2x = 0. (A.2) dt2 0 As may be seen by direct substitution, this equation has simple solutions of the form x = x0 sin ω0t or x0 = cos ω0t, (A.3) The original version of this chapter was revised: Pages 329, 330, 335, and 347 were corrected. The correction to this chapter is available at https://doi.org/10.1007/978-3-319-92796-1_8 © Springer Nature Switzerland AG 2018 329 W. R. Bennett, Jr., The Science of Musical Sound, https://doi.org/10.1007/978-3-319-92796-1 330 A The Harmonic Oscillator Fig. A.1 Frictionless harmonic oscillator showing the spring in compressed and extended positions where t is the time and x0 is the maximum amplitude of the oscillation. -

AP Physics “C” – Unit 4/Chapter 10 Notes – Yockers – JHS 2005
AP Physics “C” – Unit 4/Chapter 10 & 11 Notes – Yockers Rotational Motion Angular Position, Speed, and Acceleration - rotational motion – motion of a body that spins about an axis - axis of rotation – the line about which rotation occurs - circular motion – occurs when any single point on an object travels in a circle around an axis of rotation →r – radius →s – arc length – distance moved along the circumference of a circle - angles can be measured in radians →radian – an angle whose arc length is equal to its radius arc length 360 →rad = radian(s); 1 rad = /length of radius when s=r; 1 rad 57.3 2 → the radian is a pure number with no dimensions (ratio of lengths) →in general, any angle, , measured in radians, is defined by the relation s or s r r →conversions rad deg 180 - angular displacement, , describes how much an object has rotated →the angle through which a point, line, or body is rotated in a specified direction and about a specified axis → - angular displacement s s s s f 0 f 0 f 0 r r r s r - s is positive (+) when rotation is counterclockwise (ccw) - s is negative (-) when rotation is clockwise (cw) - angular speed, , describes rate of rotation →the rate at which a body rotates about an axis, usually expressed in rad/s (or s-1 because radians are not dimensional) →average angular speed = avg f 0 avg unit is rad/s or revolutions/unit time t t f t0 - instantaneous angular speed d lim t0 t dt - angular acceleration, , occurs when angular speed changes 2 -2 →the time rate of change of angular speed, expressed -

Forced Oscillation and Resonance
Chapter 2 Forced Oscillation and Resonance The forced oscillation problem will be crucial to our understanding of wave phenomena. Complex exponentials are even more useful for the discussion of damping and forced oscil- lations. They will help us to discuss forced oscillations without getting lost in algebra. Preview In this chapter, we apply the tools of complex exponentials and time translation invariance to deal with damped oscillation and the important physical phenomenon of resonance in single oscillators. 1. We set up and solve (using complex exponentials) the equation of motion for a damped harmonic oscillator in the overdamped, underdamped and critically damped regions. 2. We set up the equation of motion for the damped and forced harmonic oscillator. 3. We study the solution, which exhibits a resonance when the forcing frequency equals the free oscillation frequency of the corresponding undamped oscillator. 4. We study in detail a specific system of a mass on a spring in a viscous fluid. We give a physical explanation of the phase relation between the forcing term and the damping. 2.1 Damped Oscillators Consider first the free oscillation of a damped oscillator. This could be, for example, a system of a block attached to a spring, like that shown in figure 1.1, but with the whole system immersed in a viscous fluid. Then in addition to the restoring force from the spring, the block 37 38 CHAPTER 2. FORCED OSCILLATION AND RESONANCE experiences a frictional force. For small velocities, the frictional force can be taken to have the form ¡ m¡v ; (2.1) where ¡ is a constant. -
Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University
Montclair State University Montclair State University Digital Commons Theses, Dissertations and Culminating Projects 1-2019 Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University Follow this and additional works at: https://digitalcommons.montclair.edu/etd Part of the Applied Mathematics Commons Recommended Citation Rhodes, Katherine, "Least Action Principle Applied to a Non-Linear Damped Pendulum" (2019). Theses, Dissertations and Culminating Projects. 229. https://digitalcommons.montclair.edu/etd/229 This Thesis is brought to you for free and open access by Montclair State University Digital Commons. It has been accepted for inclusion in Theses, Dissertations and Culminating Projects by an authorized administrator of Montclair State University Digital Commons. For more information, please contact [email protected]. Abstract The principle of least action is a variational principle that states an object will always take the path of least action as compared to any other conceivable path. This principle can be used to derive the equations of motion of many systems, and therefore provides a unifying equation that has been applied in many fields of physics and mathematics. Hamilton’s formulation of the principle of least action typically only accounts for conservative forces, but can be reformulated to include non-conservative forces such as friction. However, it can be shown that with large values of damping, the object will no longer take the path of least action. Through numerical -

Oscillations: Damping & Resonance Big Picture
Oscillations: Damping & Resonance Big Picture I Simple Harmonic Motion handles the steady state (constant amplitude) – but how does oscillation start and stop? I Stops through damping: friction or drag robs energy I also slows frequency: ω ω0 → I Starts in 2 ways: 1. system given initial speed and/or displacement, then released 2. continuous driving at system’s natural frequency ω I driving can be slight if continuous and at the right frequency I Monday: Waves – oscillations that travel through a medium I Wednesday: quiz on Oscillations (topics 36–38) Language & Notation I xmax0 : my notation for initial amplitude (book uses xm) I I use xmax for the (always decreasing) amplitude later I ω0: angular frequency of damped oscillations I damping constant b, damping force Fdamp = bv − I Differential equation: involves a variable and its derivatives I arises in Fnet = ma when Fnet depends on x or v d2x dx d2x I example: kx = m 2 or kx b = m 2 − dt − − dt dt I solution is any function x(t) that makes the equation true I resonance: when system is driven by an oscillating force at the system’s natural frequency, it responds with large-amplitude oscillations; other driving frequencies produce small oscillations Main Results I Fdamp = bv (opposite the velocity) − 1 2 I not the drag model we used before (FD = 2 CρAv ) I but makes the math doable I also same math as RLC circuit (SP212) I Damped oscillations: amplitude decreases from xmax0 bt/2m I x(t) = xmax0 e− cos(ω0t + φ) I comes from including damping force in differential equation: kx bv = ma − − k b2 I note ω replaced by ω0: ω0 = 2 rm − 4m bt/2m I new time-dependent amplitude is xmax = xmax0 e− 1 2 bt/m I Mechanical energy dies out: E(t) = 2 kxmax = E0e− What you need to be able to do I Calculate amplitude as fraction of initial amplitude in damped oscillator I Calculate mechanical energy as fraction of initial Emech in damped oscillator I Identify which driving frequency will cause large oscillations in a system with a known natural frequeny. -

Chapter 24 Physical Pendulum
Chapter 24 Physical Pendulum 24.1 Introduction ........................................................................................................... 1 24.1.1 Simple Pendulum: Torque Approach .......................................................... 1 24.2 Physical Pendulum ................................................................................................ 2 24.3 Worked Examples ................................................................................................. 4 Example 24.1 Oscillating Rod .................................................................................. 4 Example 24.3 Torsional Oscillator .......................................................................... 7 Example 24.4 Compound Physical Pendulum ........................................................ 9 Appendix 24A Higher-Order Corrections to the Period for Larger Amplitudes of a Simple Pendulum ..................................................................................................... 12 Chapter 24 Physical Pendulum …. I had along with me….the Descriptions, with some Drawings of the principal Parts of the Pendulum-Clock which I had made, and as also of them of my then intended Timekeeper for the Longitude at Sea.1 John Harrison 24.1 Introduction We have already used Newton’s Second Law or Conservation of Energy to analyze systems like the spring-object system that oscillate. We shall now use torque and the rotational equation of motion to study oscillating systems like pendulums and torsional springs. 24.1.1 Simple -
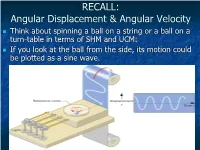
RECALL: Angular Displacement & Angular Velocity
RECALL: Angular Displacement & Angular Velocity n Think about spinning a ball on a string or a ball on a turn-table in terms of SHM and UCM: n If you look at the ball from the side, its motion could be plotted as a sine wave. n Δθ is the angle between position 1 and 2. n Δθ is the amount of rotation—measured in degrees or radians (we’ll use radians since they are the SI unit for θ). 2 θ r 1 For an object rotating about a fixed axis, the angular displacement is the angle Δθ swept out by a line passing through any point on the body and intersecting the axis of rotation perpendicularly. By convention, the angular displacement is positive if it is counterclockwise. Angular Displacement, θ n For an object rotating, angular displacement is found by: n θ (in radians) = Arc length = s radius r n Δθ = θf – θi where θi is sometimes zero. If determining Δθ for a complete circle, or one complete cycle: n Arc length = 2πr (for one revolution) n Δθ = (arc length) / r n = (2πr) / r = 2π radians n ∴ 1 revolution = 2π radians = 360o n So, 1 radian = 360o / 2π = 57.3o Once around the circular path is 360-degrees or 2π-radians! Angular Velocity n Angular Velocity = the “turning rate”—expressed in units of revolutions per second, or metric: radians per second. n Angular velocity = angular displacement / elapsed time n ω = Δθ/Δt units: radians/second or rad/s n For one cycle: Δt = T = period = time for one cycle n And, Δθ = (2πr)/r = 2π radians = angular displacement for one cycle n ∴ ω = Δθ/Δt = 2π radians / T = 2π / T n ω = 2π / T n And since T=1/f , where f = frequency n ω = 2π / (1/f) = 2πf n ω = 2πf ∴ Angular velocity is sometimes called angular frequency! Important to realize… n Angular velocity, ω, or the “turning rate” is the same everywhere on the rotating body/object, b/c Δθ/Δt is the same. -

On the Principle of Least Action
International Journal of Physics, 2018, Vol. 6, No. 2, 47-52 Available online at http://pubs.sciepub.com/ijp/6/2/4 ©Science and Education Publishing DOI:10.12691/ijp-6-2-4 On the Principle of Least Action Vu B Ho* Advanced Study, 9 Adela Court, Mulgrave, Victoria 3170, Australia *Corresponding author: [email protected] Abstract Investigations into the nature of the principle of least action have shown that there is an intrinsic relationship between geometrical and topological methods and the variational principle in classical mechanics. In this work, we follow and extend this kind of mathematical analysis into the domain of quantum mechanics. First, we show that the identification of the momentum of a quantum particle with the de Broglie wavelength in 2-dimensional space would lead to an interesting feature; namely the action principle = 0 would be satisfied not only by the stationary path, corresponding to the classical motion, but also by any path. Thereupon the Bohr quantum condition possesses a topological character in the sense that the principal quantum훿푆 number is identified with the winding number, which is used to represent the fundamental group of paths. We extend our discussions into 3-dimensional space and show that the charge of a particle also possesses a topological character and푛 is quantised and classified by the homotopy group of closed surfaces. We then discuss the possibility to extend our discussions into spaces with higher dimensions and show that there exist physical quantities that can be quantised by the higher homotopy groups. Finally we note that if Einstein’s field equations of general relativity are derived from Hilbert’s action through the principle of least action then for the case of = 2 the field equations are satisfied by any metric if the energy-momentum tensor is identified with the metric tensor, similar to the case when the momentum of a particle is identified with the curvature of the particle’s path. -

ENGN40: Dynamics and Vibrations
Chapter 5 Vibrations 5.1 Overview of Vibrations 5.1.1 Examples of practical vibration problems Vibration is a continuous cyclic motion of a structure or a component. Generally, engineers try to avoid vibrations, because vibrations have a number of unpleasant effects: • Cyclic motion implies cyclic forces. Cyclic forces are very damaging to materials. • Even modest levels of vibration can cause extreme discomfort; • Vibrations generally lead to a loss of precision in controlling machinery. Examples where vibration suppression is an issue include: Structural vibrations. Most buildings are mounted on top of special rubber pads, which are intended to isolate the building from ground vibrations. The figure on the right shows vibration isolators being installed under the floor of a building during construction (from www.wilrep.com ) No vibrations course is complete without a mention of the Tacoma Narrows suspension bridge. This bridge, constructed in the 1940s, was at the time the longest suspension bridge in the world. Because it was a new design, it suffered from an unforseen source of vibrations. In high wind, the roadway would exhibit violent torsional vibrations, as shown in the picture below. You can watch newsreel footage of the vibration and even the final collapse at http://www.youtube.com/watch?v=HxTZ446tbzE To the credit of the designers, the bridge survived for an amazingly long time before it finally failed. It is thought that the vibrations were a form of self- excited vibration known as `flutter,’ or ‘galloping’ A similar form of vibration is known to occur 2 in aircraft wings. Interestingly, modern cable stayed bridges that also suffer from a new vibration problem: the cables are very lightly damped and can vibrate badly in high winds (this is a resonance problem, not flutter).