Real-Time Simulation of a Guitar Power Amplifier Ivan Cohen, Thomas Hélie
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MI Amplification
MI Amplification Owner’s Manual 1 1. Welcome ....................................................................................................................................... 4 2. Precautions................................................................................................................................... 5 3. Amp Overview .............................................................................................................................. 6 3.1. Preamp.............................................................................................................................................. 6 3.2. Power Amp ....................................................................................................................................... 6 3.3. FX Loops .......................................................................................................................................... 7 3.4. Operating Modes ............................................................................................................................. 7 4. Getting Started ............................................................................................................................. 8 5. The Channels ............................................................................................................................... 9 5.1. Introduction ..................................................................................................................................... 9 5.2. Channel 1 ......................................................................................................................................... -

The 88-50—A Low-Distortion 50-Watt Amplifier
Fig. 1. External view of amplifier and preamplifier described by the author. This installment covers only the 50-watt power am p lifie r. The 88-50—a Low-Distortion 50-Watt Amplifier With harmonic distortion of less than 0.5 per cent throughout most of the audio spectrum, this 50-watt amplifier is comparatively simple in construction and requires only ordinary care in wiring. W. I. HEATH" and C. R. WOODVILLE* or audio amplifiers of medium from a pair of KTSS’s is slightly over the biggest gremlins of high-fi apparatus power, the KT66 output tube be 50 watts with a supply voltage of 500 a rumble filler using an attractively F came well known with the Williamson volts. This article describes the design simple circuit is incorporated in the pre amplifier, and its reputation for reliabil and construction of such an amplifier; amplifier. ity has made it much sought after in a second article will give similar details “off-the-shelf” high-fidelity amplifiers, as of a matching preamplifier. They are The Power Amplifier well as in home-built kits. shown together in Fig. 1. From the same stable there now fol The complete amplifier, the “88-50,” The circuit of the power amplifier is lows a new tube, the KTS8, a pentode has been designed to give a high per shown in Fig. 2. A pair of KTSS’s is with a higher platc-plus-screeu dissipa formance and a complete range of input connected in an ultralinear output stage. tion of 40 watts, and a higher mutual and control facilities without compli- They are driven by a push-pull double lows' a new tube," tne' JVi'so, a pentode has been designed to give a high per knwdri TU7'fknr:'ox -j.ixoo‘A is with a higher plate-plus-scrceu dissipa formance and a complete range of input connected in an ultralinear output stage. -

Mixed Classes Amplifiers
<< Prev TUBE CAD JOURNAL Next >> Mixed-Class & Mixed-Topology Amplifiers If only we could save our cake and eat it at the same time. The aim of a mixed class amplifier is to provide the high quality sound of Class-A Class-B Class-A operation with the greater efficiency and power output of Class-B operation. An additional aim might be to further the listener’s ability to tune the amplifier’s sound by means of a single potentiometer...but let’s not get to far ahead of ourselves. Just as push-pull operation doubled the single- At first, all new amplifier topologies are hard ended solo output tube, mixed class operation to understand. Imagine when all amplifiers were doubles push-pull’s double output tubes; thus at single-ended how difficult it must have been to least four output tubes are needed. One pair runs explain push-pull operation. What is “phase” in Class-A push-pull and the second pair runs in and why does it need to be split? If the output Class-AB or Class-B (or even Class-C) push- transformer isn’t partially magnetized and pull. Thus, the first pair are always conducting, doesn't have an air gap, how can it work? These while the second pair can be completely turned and other questions would require careful off (or run at a much lower current) at idle. answering, as push-pull operation also brought As the signal level increases, the second pair the possibility and the complication of Class-AB is activated, unburdening the first pair and and Class-B operation of the output tubes, which greatly increasing the output power. -

Optomized Electron Stream Web Pages
Web: http://www.pearl-hifi.com 86008, 2106 33 Ave. SW, Calgary, AB; CAN T2T 1Z6 E-mail: [email protected] Ph: +.1.403.244.4434 Fx: +.1.403.244.7134 Precision Electro-Acoustic Research Laboratory ❦ Hand-Builders of Fine Music-Reproduction Equipment Please note that the links in the PEARL logotype above are “live” and can be used to direct your web browser to our site or to open an e-mail message window addressed to ourselves. To view our item listings on eBay, click here. To see the feedback we have left for our customers, click here. This document has been prepared as a public service . Any and all trademarks and logotypes used herein are the property of their owners. It is our intent to provide this document in accordance with the stipulations with respect to “fair use” as delineated in Copyrights - Chapter 1: Subject Matter and Scope of Copyright; Sec. 107. Limitations on exclusive rights: Fair Use. Public access to copy of this document is provided on the website of Cornell Law School ( http://www4.law.cornell.edu/uscode/17/107.html ) and is here reproduced below:: Sec. 107. - Limitations on exclusive rights: Fair Use Notwithstanding the provisions of sections 106 and 106A, the fair use of a copyrighted work, includ- ing such use by reproduction in copies or phonorecords or by any other means specified by that section, for purposes such as criticism, comment, news reporting, teaching (including multiple copies for class- room use), scholarship, or research, is not an infringement of copyright. In determining whether the use made of a work in any particular case is a fair use the factors to be considered shall include: 1 - the purpose and character of the use, including whether such use is of a commercial nature or is for nonprofit educational purposes; 2 - the nature of the copyrighted work; 3 - the amount and substantiality of the portion used in relation to the copy righted work as a whole; and 4 - the effect of the use upon the potential market for or value of the copy- righted work. -

GOLD LION KT88 Made in England
GOLD LION KT88 Made in England Draft of new spec sheet 4/30/2002 BEAM TETRODE 6-3V INDIRECTLY HEATED The KT88 has an absolute maximum anode dissipation rating of 42W and is designed for use in the output stage of an a.f. amplifier. Two valves in Class AB1 give a continuous output of up to 100W. The KT88 is also suitable for use as a series valve in a stabilized power supply. The KT88 is a commercial version of the CV5220 and is similar to the 6550. BASE CONNECTIONS AND VALVE DIMENSIONS Base: Metal shell wafer octal Bulb: Tubular Max. Overall length: 125 mm Max. Seated length: 110 mm Max.Diameter: 52 mm HEATER Vh 6.3 V Ih 1.6 (approx) A MAXIMUM RATINGS Absolute Design Maximum Units Va 800 800 V Vg2 600 600 V Va, g 2 600 600 V Vg 1 200 200 V Pa 42 35 W Pg2 8 6 W Pa+g2 46 40 W I k 230 230 ma Vh-k 250 200 V Tbulb 250 250 degrees C Rg1-k (cathode bias) Pa|g2 < 135W 470 k ohm Pa|g2 > 35W 270 k ohm Rg1-k (fixed bias) Pa|g2 < 135W 220 k ohm Pa|g2 > 35W 100 k ohm CAPACITANCES (Measured on a cold unscreened valve) Triode Connection Cg1-a.g.2: 7.9pF Cg1-all less a.g2: 9.3pF Ca.g2 -all less g1 : 17pF Tetrode Connection Cg1-a: 1.2pF Cal -all less a: 16pF Ca -all less g1 : 12pF CHARACTERISTICS Tetrode Connected Triode Connected Va 250 V Va,g2 250 V Vg2 250 V Ia+ g2 143 mA Ia 140 mA -Vg1 15 approx V Ig2 3 (approx) mA gm 12 mA/V Vg1 15 (approx) V ra 670 ohms gm 11.5 mA/V µ 8 -- ra 12 ohms µg1-g2 8 -- Page 2 of 7 TYPICAL OPERATION Push-Pull. -

EAT KT88 Vacuum Tube Review
From the Editor nthusiasts of all ages can appreciate the artistry of the band The Grateful Dead, and many find it tempting to adopt frag- ments of the Dead's song lyrics as mottos. My personal favorite is this one: "Every once in while you get shown the light / Ein the strangest of places if you look at it right." How true, especially in the worlds of audio and home theater. In this issue, AVguide Monthly reviewers have gone searching for insights in what may at first seem strange places-posing intriguing "what if?" questions like these: • What if you used an Apple iPod backed by a small headphone amp and a killer pair of headphones as your high-end audio system?" • What if you bought "full-range speakers" in two parts-choosing nearly full-range speakers to handle everything from the mid-bass on up, and a highly specialized subwoofer to handle the lowest frequencies? • What if you discovered one of the best places to enjoy HD home theater was your desktop? • What if you could get "big" home-theater sound from downright tiny speakers? • What if you could transform the sound of your vacuum-tube amplifier, just by installing a better set of tubes? • What if you could get a big improvement in system sound quality through a not-so-big investment in better speaker cables? The point is to keep an open mind when experimenting with non-traditional components and system configurations. Experimentation, after all, is the road that leads to those unexpected moments where you "get shown the light" and discover new products and approaches that really work, and can really make a difference in how your system performs. -
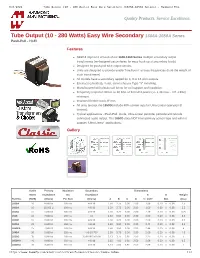
Easy Wire Secondary 1608A-1650A Series Push-Pull - HI-FI
9/6/2021 Tube Output (10 - 280 Watts) Easy Wire Secondary (1608A-1650A Series) - Hammond Mfg. Quality Products. Service Excellence. Tube Output (10 - 280 Watts) Easy Wire Secondary 1608A-1650A Series Push-Pull - HI-FI Features NEW & improved version of our 1608-1650 Series multiple secondary output transformers (re-designed secondaries for easy hook-up of secondary loads). Designed for push-pull tube output circuits. Units are designed to provide ample "headroom" at bass frequencies (note the weight of each transformer). All models have a secondary tapped for 4, 8 or 16 ohm outputs. Enclosed (shielded), 4 slot, above chassis Type "X" mounting. Manufactured with plastic coil forms for coil support and insulation. Frequency response 30 Hz. to 30 Khz. at full rated power (+/- 1 db max. - ref. 1 Khz) minimum. Insulated flexible leads 8" min. All units (except the 1650G) include 40% screen taps for Ultra-Linear operation (if desired). Typical applications - Push-Pull: triode, Ultra-Linear pentode, pentode and tetrode connected audio output. The 1650G does NOT have primary screen taps and will not support "Ultra-Linear" applications. Gallery Audio Primary Maximum Secondary Dimensions Watts Impedance DC Impedance E G Weight Part No. (RMS) (Ohms) Per Side (Ohms) A B C D +/- 1/16" Slot (lbs.) 1608A 10 8,000 ct 100 ma. 4-8-16 2.50 2.75 3.06 2.00 1.69 0.20 x 0.38 2.5 1609A 10 10,000 ct 100 ma. 4-8-16 2.50 2.75 3.06 2.00 1.69 0.20 x 0.38 2.5 1615A 15 5,000 ct 100 ma. -

Univalve.Pdf
® UniValve™ Amplifier Introducing the THD UniValve Amplifier! The new THD UniValve is a Single-Ended Class A amplifier head with a single output tube that can be switched at will among many octal- based power tubes for different tones without re-biasing the amp. Useable tubes include 6L6, EL34, 6550, KT90, KT88, KT77 and KT66. With the amp in “LoV” setting you can use 6V6 for a total output of 5 watts. A special UniValve Yellow Jacket™ Converter is available allowing the UniValve to use the popular EL84 power tube at a total of 4 watts output power, also in “LoV” setting. Likewise, the two preamp tubes can be any combination of 12AX7, 12AT7, 12AU7, 12AY7 or 12AZ7. The UniValve delivers tones from smooth and clear to very aggressive overdrive. It is easily capable of driving a 4 x 12 cabinet, yet is quite small and light. It has a built-in Hot Plate™ Power Attenuator that allows for full output distortion at almost any volume. And it doesn’t cost as much as you might think. set of tubes and the other set, each for one half of the wave. The set not in use is turned off by a positive swing of the grid voltage. Single-ended output stages always operate in Class A. Most push-pull amplifiers, including the venerated Vox AC-30, operate in Class AB when What is Class A? overdriven, even if they are in Class A while clean. Class A operation has its own unique tonal characteristics that set it apart from other tube amp classes. -

The Ultra-Linear Power Amplifier
The Ultra-Linear Power Amplifier An adventure between triode and pentode Rudolf Moers 1 Introduction In 95, David Hafler and Herbert Keroes introduced a pentode power amplifier, in which a tap of the primary transformer winding was connected to the screen grid of the power pentode [2]. They called this the Ultra-Linear power amplifier. This power amplifier shows the advantages of a triode, low anode AC internal resistance and low distortion, as well as the advantages of a pentode, large deliv - ered anode AC power and good efficiency. The narrative given by David Hafler and Herbert Keroes is good and substantiated in practice; this is very important. What I personally missed in their narration is a theoretical explanation of the operation of the ultra- linear circuit. I have several electronics books including the well known seven parts of the electron tube book range, written by scientists of the Philips Gloeilampenfabrieken Company at Eindhoven in the Netherlands. I also have all the electronics books of the company school written by A.J. Sietsma. In none of these books did I find a theoretical explanation of the operation of the ultra- linear circuit. I do not suggest that such an explanation does not exist ; I just have not been able to find it. Therefore I went on an adventure between triode and pentode myself. In this adventure, the - ory will be checked against practice. Figure 1. Homework exercise from the great book from 1959 by A.J. Sietsma [3]. posted with permission from Linear Audio www.linearaudio.net Rudolf Moers When doing research for my book [], I was pleasantly surprised to find the homework exercise of fig - ure 1 . -

Why Is It Worth Choosing a Vacuum Tube Amplifier?
Why is it worth choosing a What kinds of tubes are available vacuum tube amplifier? and what are the differences The sound from a tube amplifier provides warmth, between them? dynamics, but above all, it is very natural. The most commonly used vacuum tubes in tube am- If such a presentation of music is being expected, plifiers are the EL34, KT88 and 300b. Some less then the purchase of a vacuum tube based amplifier popular ones are the EL84, ECL86, KT120, 6L6. seems to be the right decision. Each of these are different in terms of power, con- struction, and sound. The commonly used transistor amplifiers are equipped with many corrective treatments, such as loudness, high or low tones correction, so as to What is the expected tube life? warm up their somewhat stiff, edgy and cold audio presentation, as normally delivered by such devic- In some of the best amplifiers, the World’s most du- es. But we must keep in mind that such a modified rable tubes are used. Russian tubes. Their durability presentation never is, and never will be true. It is only is up to 10,000 hours, which is about 9 years, as- by using the mentioned treatments, ‘gimmicks’, that suming that we will be listening to music 3 hours a such equipment can pretend the intrinsic warmth of day, every day, 365 days per year. vacuum tube based equipment. The number as specified by the manufacturer, such as 10000 hours, does not necessarily mean that the tube will fail after such time. This is only a guar- antee of the tube’s emission parameters. -

TAD-Products
Tube Amp Doctor is a German company specialized in electron tubes and related components for musical instruments and audio amplification. TAD is closely cooperating with all of the few existing tube factories. Our techs, who are all active musicians, have been developing processes to test and secure the quality, consistency and reliability of our TAD tubes. TAD STR tubes (Special Tube Requirement) are produced to exclusive TAD designs and strict specifications. TAD tubes get evaluated, tested, approved, selected and finally matched, labeled and boxed. All tube quality control and processing is done at the TAD plant in Germany. Every single tube has passed our listening test to ensure the finest selection of best premium quality tubes available on the market to support your music. Tube Laboratoriesquality control and test approach BURN IN PROCESS Tubes must be properly burned-in to provide the stable and reliable data that is required for quality tube matching. This is a time- and energy-consuming and cost-intensive pro- cess, which most new tubes on the market are not subjected to. During the extensive TAD burn-in procedure, the tube’s cath- ode surface is formatted, which balances the tube’s emission and offers increased dynamic headroom. This in itself leads to a better overall response and smooth tone. TAD tubes offer maximum reliability, consistency and sturdiness for one goal: the ultimate tone! TAD BIAS SYSTEM true blackplate The bias setting of any amp has a noticeable impact on its anode construction tone and attack. The bias can be set “colder” for a cleaner sound or “hotter” for more punch and easier saturation. -

KT88-Shuguang Beam Tetrode
KT88-Shuguang Beam Tetrode The KT88-Shuguang has an absolute maximum anode dissipation rating of 50W and is designed for use in the output stage of an a.f. amplifier. Two tubes in Class AB1 give a continuous output of up to 120W. The KT88 is also suitable for use as a series tube in a stabilised power supply. HEATER ................................................................................................................................................................................. Vh 6.3 V Ih (approx.) ..........................................................................................1.6 A MAXIMUM RATINGS Absolute and Design Maximum a V ..................................................................................................................................................................... 800 V ................................................................................................................................................................... Vg2 600 V ................................................................................................................................................................ Va,g2 600 V ................................................................................................................................................................. -Vg1 200 V ...................................................................................................................................................................... pa 50 W ...................................................................................................................................................................