Green's Theorem
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Curl and Divergence
Sections 15.5-15.8: Divergence, Curl, Surface Integrals, Stokes' and Divergence Theorems Reeve Garrett 1 Curl and Divergence Definition 1.1 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the divergence of F on D is @ @ @ div F := r · F = ; ; · hf; g; hi = f + g + h ; @x @y @z x y z @ @ @ where r = h @x ; @y ; @z i is the del operator. If div F = 0, we say that F is source free. Note that these definitions (divergence and source free) completely agrees with their 2D analogues in 15.4. Theorem 1.2 Suppose that F is a radial vector field, i.e. if r = hx; y; zi, then for some real number p, r hx;y;zi 3−p F = jrjp = (x2+y2+z2)p=2 , then div F = jrjp . Theorem 1.3 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the curl of F on D is curl F := r × F = hhy − gz; fz − hx; gx − fyi: If curl F = 0, then we say F is irrotational. Note that gx − fy is the 2D curl as defined in section 15.4. Therefore, if we fix a point (a; b; c), [gx − fy](a; b; c), measures the rotation of F at the point (a; b; c) in the plane z = c. Similarly, [hy − gz](a; b; c) measures the rotation of F in the plane x = a at (a; b; c), and [fz − hx](a; b; c) measures the rotation of F in the plane y = b at the point (a; b; c). -

Curl, Divergence and Laplacian
Curl, Divergence and Laplacian What to know: 1. The definition of curl and it two properties, that is, theorem 1, and be able to predict qualitatively how the curl of a vector field behaves from a picture. 2. The definition of divergence and it two properties, that is, if div F~ 6= 0 then F~ can't be written as the curl of another field, and be able to tell a vector field of clearly nonzero,positive or negative divergence from the picture. 3. Know the definition of the Laplace operator 4. Know what kind of objects those operator take as input and what they give as output. The curl operator Let's look at two plots of vector fields: Figure 1: The vector field Figure 2: The vector field h−y; x; 0i: h1; 1; 0i We can observe that the second one looks like it is rotating around the z axis. We'd like to be able to predict this kind of behavior without having to look at a picture. We also promised to find a criterion that checks whether a vector field is conservative in R3. Both of those goals are accomplished using a tool called the curl operator, even though neither of those two properties is exactly obvious from the definition we'll give. Definition 1. Let F~ = hP; Q; Ri be a vector field in R3, where P , Q and R are continuously differentiable. We define the curl operator: @R @Q @P @R @Q @P curl F~ = − ~i + − ~j + − ~k: (1) @y @z @z @x @x @y Remarks: 1. -

10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C
10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C 1. Introduction In the next four sections we present applications of the three generalizations of the Fundamental Theorem of Cal- culus (FTC) to three space dimensions (x, y, z) 3,a version associated with each of the three linear operators,2R the Gradient, the Curl and the Divergence. Since much of classical physics is framed in terms of these three gener- alizations of FTC, these operators are often referred to as the three linear first order operators of classical physics. The FTC in one dimension states that the integral of a function over a closed interval [a, b] is equal to its anti- derivative evaluated between the endpoints of the interval: b f 0(x)dx = f(b) f(a). − Za This generalizes to the following three versions of the FTC in two and three dimensions. The first states that the line integral of a gradient vector field F = f along a curve , (in physics the work done by F) is exactlyr equal to the changeC in its potential potential f across the endpoints A, B of : C F Tds= f(B) f(A). (1) · − ZC The second, called Stokes Theorem, says that the flux of the Curl of a vector field F through a two dimensional surface in 3 is the line integral of F around the curve that S R 1 C 2 bounds : S CurlF n dσ = F Tds (2) · · ZZS ZC And the third, called the Divergence Theorem, states that the integral of the Divergence of F over an enclosed vol- ume is equal to the flux of F outward through the two dimensionalV closed surface that bounds : S V DivF dV = F n dσ. -

Approaching Green's Theorem Via Riemann Sums
APPROACHING GREEN’S THEOREM VIA RIEMANN SUMS JENNIE BUSKIN, PHILIP PROSAPIO, AND SCOTT A. TAYLOR ABSTRACT. We give a proof of Green’s theorem which captures the underlying intuition and which relies only on the mean value theorems for derivatives and integrals and on the change of variables theorem for double integrals. 1. INTRODUCTION The counterpoint of the discrete and continuous has been, perhaps even since Eu- clid, the essence of many mathematical fugues. Despite this, there are fundamental mathematical subjects where their voices are difficult to distinguish. For example, although early Calculus courses make much of the passage from the discrete world of average rate of change and Riemann sums to the continuous (or, more accurately, smooth) world of derivatives and integrals, by the time the student reaches the cen- tral material of vector calculus: scalar fields, vector fields, and their integrals over curves and surfaces, the voice of discrete mathematics has been obscured by the coloratura of continuous mathematics. Our aim in this article is to restore the bal- ance of the voices by showing how Green’s Theorem can be understood from the discrete point of view. Although Green’s Theorem admits many generalizations (the most important un- doubtedly being the Generalized Stokes’ Theorem from the theory of differentiable manifolds), we restrict ourselves to one of its simplest forms: Green’s Theorem. Let S ⊂ R2 be a compact surface bounded by (finitely many) simple closed piecewise C1 curves oriented so that S is on their left. Suppose that M F = is a C1 vector field defined on an open set U containing S. -

External Aerodynamics of the Magnetosphere
’ .., NASA TECHNICAL NOTE NASA TN- I- &: I -I LOAN COPY: R AFWL (W KIRTLAND AFI EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE by John R. Spreiter, A Zbertu Y. A Zksne, and Audrey L. Summers Awes Research Center Moffett Fie@ CuZ$ NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. JUNE 1968 i TECH LIBRARY KAFB, NM Illll1lllll111lll lllll lilll llll lllll 1111 Ill 0133359 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center Moffett Field, Calif. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTl price $3.00 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE* By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center SUMMARY A comprehensive survey is given of the continuum fluid theory of the solar wind and its interaction with the Earth's magnetic field, and the rela- tion between the calculated results and those actually measured in space. A unified basis for the entire discussion is provided by the equations of mag- netohydrodynamics, augmented by relations from kinetic theory for certain small-scale details of the flow. While the full complexity of magnetohydrodynamics is required for the formulation of the model and the establishment of the proper conditions to apply at the magnetosphere boundary, it is shown that the magnetic field actually experienced in space is usually sufficiently small that an adequate approximation to the solution can be obtained by first solving the simpler equations of gasdynamics for the flow and then using the results to calculate the deformation of the magnetic field. -

Stokes' Theorem
V13.3 Stokes’ Theorem 3. Proof of Stokes’ Theorem. We will prove Stokes’ theorem for a vector field of the form P (x, y, z) k . That is, we will show, with the usual notations, (3) P (x, y, z) dz = curl (P k ) · n dS . � C � �S We assume S is given as the graph of z = f(x, y) over a region R of the xy-plane; we let C be the boundary of S, and C ′ the boundary of R. We take n on S to be pointing generally upwards, so that |n · k | = n · k . To prove (3), we turn the left side into a line integral around C ′, and the right side into a double integral over R, both in the xy-plane. Then we show that these two integrals are equal by Green’s theorem. To calculate the line integrals around C and C ′, we parametrize these curves. Let ′ C : x = x(t), y = y(t), t0 ≤ t ≤ t1 be a parametrization of the curve C ′ in the xy-plane; then C : x = x(t), y = y(t), z = f(x(t), y(t)), t0 ≤ t ≤ t1 gives a corresponding parametrization of the space curve C lying over it, since C lies on the surface z = f(x, y). Attacking the line integral first, we claim that (4) P (x, y, z) dz = P (x, y, f(x, y))(fxdx + fydy) . � C � C′ This looks reasonable purely formally, since we get the right side by substituting into the left side the expressions for z and dz in terms of x and y: z = f(x, y), dz = fxdx + fydy. -
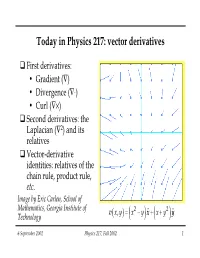
Today in Physics 217: Vector Derivatives
Today in Physics 217: vector derivatives First derivatives: • Gradient (—) • Divergence (—◊) •Curl (—¥) Second derivatives: the Laplacian (—2) and its relatives Vector-derivative identities: relatives of the chain rule, product rule, etc. Image by Eric Carlen, School of Mathematics, Georgia Institute of 22 vxyxy, =−++ x yˆˆ x y Technology ()()() 6 September 2002 Physics 217, Fall 2002 1 Differential vector calculus df/dx provides us with information on how quickly a function of one variable, f(x), changes. For instance, when the argument changes by an infinitesimal amount, from x to x+dx, f changes by df, given by df df= dx dx In three dimensions, the function f will in general be a function of x, y, and z: f(x, y, z). The change in f is equal to ∂∂∂fff df=++ dx dy dz ∂∂∂xyz ∂∂∂fff =++⋅++ˆˆˆˆˆˆ xyzxyz ()()dx() dy() dz ∂∂∂xyz ≡⋅∇fdl 6 September 2002 Physics 217, Fall 2002 2 Differential vector calculus (continued) The vector derivative operator — (“del”) ∂∂∂ ∇ =++xyzˆˆˆ ∂∂∂xyz produces a vector when it operates on scalar function f(x,y,z). — is a vector, as we can see from its behavior under coordinate rotations: I ′ ()∇∇ff=⋅R but its magnitude is not a number: it is an operator. 6 September 2002 Physics 217, Fall 2002 3 Differential vector calculus (continued) There are three kinds of vector derivatives, corresponding to the three kinds of multiplication possible with vectors: Gradient, the analogue of multiplication by a scalar. ∇f Divergence, like the scalar (dot) product. ∇⋅v Curl, which corresponds to the vector (cross) product. ∇×v 6 September 2002 Physics 217, Fall 2002 4 Gradient The result of applying the vector derivative operator on a scalar function f is called the gradient of f: ∂∂∂fff ∇f =++xyzˆˆˆ ∂∂∂xyz The direction of the gradient points in the direction of maximum increase of f (i.e. -

Divergence, Gradient and Curl Based on Lecture Notes by James
Divergence, gradient and curl Based on lecture notes by James McKernan One can formally define the gradient of a function 3 rf : R −! R; by the formal rule @f @f @f grad f = rf = ^{ +| ^ + k^ @x @y @z d Just like dx is an operator that can be applied to a function, the del operator is a vector operator given by @ @ @ @ @ @ r = ^{ +| ^ + k^ = ; ; @x @y @z @x @y @z Using the operator del we can define two other operations, this time on vector fields: Blackboard 1. Let A ⊂ R3 be an open subset and let F~ : A −! R3 be a vector field. The divergence of F~ is the scalar function, div F~ : A −! R; which is defined by the rule div F~ (x; y; z) = r · F~ (x; y; z) @f @f @f = ^{ +| ^ + k^ · (F (x; y; z);F (x; y; z);F (x; y; z)) @x @y @z 1 2 3 @F @F @F = 1 + 2 + 3 : @x @y @z The curl of F~ is the vector field 3 curl F~ : A −! R ; which is defined by the rule curl F~ (x; x; z) = r × F~ (x; y; z) ^{ |^ k^ = @ @ @ @x @y @z F1 F2 F3 @F @F @F @F @F @F = 3 − 2 ^{ − 3 − 1 |^+ 2 − 1 k:^ @y @z @x @z @x @y Note that the del operator makes sense for any n, not just n = 3. So we can define the gradient and the divergence in all dimensions. However curl only makes sense when n = 3. Blackboard 2. The vector field F~ : A −! R3 is called rotation free if the curl is zero, curl F~ = ~0, and it is called incompressible if the divergence is zero, div F~ = 0. -

List of Mathematical Symbols by Subject from Wikipedia, the Free Encyclopedia
List of mathematical symbols by subject From Wikipedia, the free encyclopedia This list of mathematical symbols by subject shows a selection of the most common symbols that are used in modern mathematical notation within formulas, grouped by mathematical topic. As it is virtually impossible to list all the symbols ever used in mathematics, only those symbols which occur often in mathematics or mathematics education are included. Many of the characters are standardized, for example in DIN 1302 General mathematical symbols or DIN EN ISO 80000-2 Quantities and units – Part 2: Mathematical signs for science and technology. The following list is largely limited to non-alphanumeric characters. It is divided by areas of mathematics and grouped within sub-regions. Some symbols have a different meaning depending on the context and appear accordingly several times in the list. Further information on the symbols and their meaning can be found in the respective linked articles. Contents 1 Guide 2 Set theory 2.1 Definition symbols 2.2 Set construction 2.3 Set operations 2.4 Set relations 2.5 Number sets 2.6 Cardinality 3 Arithmetic 3.1 Arithmetic operators 3.2 Equality signs 3.3 Comparison 3.4 Divisibility 3.5 Intervals 3.6 Elementary functions 3.7 Complex numbers 3.8 Mathematical constants 4 Calculus 4.1 Sequences and series 4.2 Functions 4.3 Limits 4.4 Asymptotic behaviour 4.5 Differential calculus 4.6 Integral calculus 4.7 Vector calculus 4.8 Topology 4.9 Functional analysis 5 Linear algebra and geometry 5.1 Elementary geometry 5.2 Vectors and matrices 5.3 Vector calculus 5.4 Matrix calculus 5.5 Vector spaces 6 Algebra 6.1 Relations 6.2 Group theory 6.3 Field theory 6.4 Ring theory 7 Combinatorics 8 Stochastics 8.1 Probability theory 8.2 Statistics 9 Logic 9.1 Operators 9.2 Quantifiers 9.3 Deduction symbols 10 See also 11 References 12 External links Guide The following information is provided for each mathematical symbol: Symbol: The symbol as it is represented by LaTeX. -

Calculus: Intuitive Explanations
Calculus: Intuitive Explanations Radon Rosborough https://intuitiveexplanations.com/math/calculus-intuitive-explanations/ Intuitive Explanations is a collection of clear, easy-to-understand, intuitive explanations of many of the more complex concepts in calculus. In this document, an “intuitive” explanation is not one without any mathematical symbols. Rather, it is one in which each definition, concept, and part of an equation can be understood in a way that is more than “a piece of mathematics”. For instance, some textbooks simply define mathematical terms, whereas Intuitive Explanations explains what idea each term is meant to represent and why the definition has to be the way it is in order for that idea to be captured. As another example, the proofs in Intuitive Explanations avoid steps with no clear motivation (like adding and subtracting the same quantity), so that they seem natural and not magical. See the table of contents for information on what topics are covered. Before each section, there is a note clarifying what prerequisite knowledge about calculus is required to understand the material presented. Section 1 contains a number of links to other resources useful for learning calculus around the Web. I originally wrote Intuitive Explanations in high school, during the summer between AP Calculus BC and Calculus 3, and the topics covered here are, generally speaking, the topics that are covered poorly in the textbook we used (Calculus by Ron Larson and Bruce Edwards, tenth edition). Contents 1 About Intuitive Explanations ................................. 4 2 The Formal Definition of Limit ................................ 5 2.1 First Attempts ...................................... 6 2.2 Arbitrary Closeness .................................... 7 2.3 Using Symbols ..................................... -

Multivariable Calculus Math 21A
Multivariable Calculus Math 21a Harvard University Spring 2004 Oliver Knill These are some class notes distributed in a multivariable calculus course tought in Spring 2004. This was a physics flavored section. Some of the pages were developed as complements to the text and lectures in the years 2000-2004. While some of the pages are proofread pretty well over the years, others were written just the night before class. The last lecture was "calculus beyond calculus". Glued with it after that are some notes from "last hours" from previous semesters. Oliver Knill. 5/7/2004 Lecture 1: VECTORS DOT PRODUCT O. Knill, Math21a VECTOR OPERATIONS: The ad- ~u + ~v = ~v + ~u commutativity dition and scalar multiplication of ~u + (~v + w~) = (~u + ~v) + w~ additive associativity HOMEWORK: Section 10.1: 42,60: Section 10.2: 4,16 vectors satisfy "obvious" properties. ~u + ~0 = ~0 + ~u = ~0 null vector There is no need to memorize them. r (s ~v) = (r s) ~v scalar associativity ∗ ∗ ∗ ∗ VECTORS. Two points P1 = (x1; y1), Q = P2 = (x2; y2) in the plane determine a vector ~v = x2 x1; y2 y1 . We write here for multiplication (r + s)~v = ~v(r + s) distributivity in scalar h − − i ∗ It points from P1 to P2 and we can write P1 + ~v = P2. with a scalar but usually, the multi- r(~v + w~) = r~v + rw~ distributivity in vector COORDINATES. Points P in space are in one to one correspondence to vectors pointing from 0 to P . The plication sign is left out. 1 ~v = ~v the one element numbers ~vi in a vector ~v = (v1; v2) are also called components or of the vector. -

Differential Forms: Unifying the Theorems of Vector Calculus
Differential Forms: Unifying the Theorems of Vector Calculus In class we have discussed the important vector calculus theorems known as Green's Theorem, Divergence Theorem, and Stokes's Theorem. Interestingly enough, all of these results, as well as the fundamental theorem for line integrals (so in particular the fundamental theorem of calculus), are merely special cases of one and the same theorem named after George Gabriel Stokes (1819-1903). This all-including theorem is stated in terms of differential forms. Without giving exact definitions, let us use the language of differential forms to unify the theorems we have learned. A striking pattern will emerge. 0-forms. A scalar field (i.e. a real-valued function) is also called a 0-form. 1-forms. Recall the following notation for line integrals (in 3-space, say): Z Z b Z F(r) · dr = P x0(t)dt +Q y0(t)dt +R z0(t)dt = P dx + Qdy + Rdz; C a | {z } | {z } | {z } C dx dy dz where F = P i + Qj + Rk. The expression P (x; y; z)dx + Q(x; y; z)dy + R(x; y; z)dz is called a 1-form. 2-forms. In evaluating surface integrals we can introduce similar notation: ZZ F · n dS S ZZ @r × @r @r @r @u @v = F · × dudv Γ @r @r @u @v @u × @v ZZ @y @y ZZ @x @x ZZ @x @x @u @v @u @v @u @v = P @z @z dudv − Q @z @z dudv + R @y @y dudv Γ @u @v Γ @u @v Γ @u @v | {z } | {z } | {z } dy^dz dx^dz dx^dy ZZ = P dy ^ dz − Qdx ^ dz + Rdx ^ dy: S We call P (x; y; z)dy ^ dz − Q(x; y; z)dx ^ dz + R(x; y; z)dx ^ dy a 2-form.