Curl and Divergence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Curl and Divergence
Sections 15.5-15.8: Divergence, Curl, Surface Integrals, Stokes' and Divergence Theorems Reeve Garrett 1 Curl and Divergence Definition 1.1 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the divergence of F on D is @ @ @ div F := r · F = ; ; · hf; g; hi = f + g + h ; @x @y @z x y z @ @ @ where r = h @x ; @y ; @z i is the del operator. If div F = 0, we say that F is source free. Note that these definitions (divergence and source free) completely agrees with their 2D analogues in 15.4. Theorem 1.2 Suppose that F is a radial vector field, i.e. if r = hx; y; zi, then for some real number p, r hx;y;zi 3−p F = jrjp = (x2+y2+z2)p=2 , then div F = jrjp . Theorem 1.3 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the curl of F on D is curl F := r × F = hhy − gz; fz − hx; gx − fyi: If curl F = 0, then we say F is irrotational. Note that gx − fy is the 2D curl as defined in section 15.4. Therefore, if we fix a point (a; b; c), [gx − fy](a; b; c), measures the rotation of F at the point (a; b; c) in the plane z = c. Similarly, [hy − gz](a; b; c) measures the rotation of F in the plane x = a at (a; b; c), and [fz − hx](a; b; c) measures the rotation of F in the plane y = b at the point (a; b; c). -

Curl, Divergence and Laplacian
Curl, Divergence and Laplacian What to know: 1. The definition of curl and it two properties, that is, theorem 1, and be able to predict qualitatively how the curl of a vector field behaves from a picture. 2. The definition of divergence and it two properties, that is, if div F~ 6= 0 then F~ can't be written as the curl of another field, and be able to tell a vector field of clearly nonzero,positive or negative divergence from the picture. 3. Know the definition of the Laplace operator 4. Know what kind of objects those operator take as input and what they give as output. The curl operator Let's look at two plots of vector fields: Figure 1: The vector field Figure 2: The vector field h−y; x; 0i: h1; 1; 0i We can observe that the second one looks like it is rotating around the z axis. We'd like to be able to predict this kind of behavior without having to look at a picture. We also promised to find a criterion that checks whether a vector field is conservative in R3. Both of those goals are accomplished using a tool called the curl operator, even though neither of those two properties is exactly obvious from the definition we'll give. Definition 1. Let F~ = hP; Q; Ri be a vector field in R3, where P , Q and R are continuously differentiable. We define the curl operator: @R @Q @P @R @Q @P curl F~ = − ~i + − ~j + − ~k: (1) @y @z @z @x @x @y Remarks: 1. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C
10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C 1. Introduction In the next four sections we present applications of the three generalizations of the Fundamental Theorem of Cal- culus (FTC) to three space dimensions (x, y, z) 3,a version associated with each of the three linear operators,2R the Gradient, the Curl and the Divergence. Since much of classical physics is framed in terms of these three gener- alizations of FTC, these operators are often referred to as the three linear first order operators of classical physics. The FTC in one dimension states that the integral of a function over a closed interval [a, b] is equal to its anti- derivative evaluated between the endpoints of the interval: b f 0(x)dx = f(b) f(a). − Za This generalizes to the following three versions of the FTC in two and three dimensions. The first states that the line integral of a gradient vector field F = f along a curve , (in physics the work done by F) is exactlyr equal to the changeC in its potential potential f across the endpoints A, B of : C F Tds= f(B) f(A). (1) · − ZC The second, called Stokes Theorem, says that the flux of the Curl of a vector field F through a two dimensional surface in 3 is the line integral of F around the curve that S R 1 C 2 bounds : S CurlF n dσ = F Tds (2) · · ZZS ZC And the third, called the Divergence Theorem, states that the integral of the Divergence of F over an enclosed vol- ume is equal to the flux of F outward through the two dimensionalV closed surface that bounds : S V DivF dV = F n dσ. -

The Divergence of a Vector Field.Doc 1/8
9/16/2005 The Divergence of a Vector Field.doc 1/8 The Divergence of a Vector Field The mathematical definition of divergence is: w∫∫ A(r )⋅ds ∇⋅A()rlim = S ∆→v 0 ∆v where the surface S is a closed surface that completely surrounds a very small volume ∆v at point r , and where ds points outward from the closed surface. From the definition of surface integral, we see that divergence basically indicates the amount of vector field A ()r that is converging to, or diverging from, a given point. For example, consider these vector fields in the region of a specific point: ∆ v ∆v ∇⋅A ()r0 < ∇ ⋅>A (r0) Jim Stiles The Univ. of Kansas Dept. of EECS 9/16/2005 The Divergence of a Vector Field.doc 2/8 The field on the left is converging to a point, and therefore the divergence of the vector field at that point is negative. Conversely, the vector field on the right is diverging from a point. As a result, the divergence of the vector field at that point is greater than zero. Consider some other vector fields in the region of a specific point: ∇⋅A ()r0 = ∇ ⋅=A (r0) For each of these vector fields, the surface integral is zero. Over some portions of the surface, the normal component is positive, whereas on other portions, the normal component is negative. However, integration over the entire surface is equal to zero—the divergence of the vector field at this point is zero. * Generally, the divergence of a vector field results in a scalar field (divergence) that is positive in some regions in space, negative other regions, and zero elsewhere. -

Approaching Green's Theorem Via Riemann Sums
APPROACHING GREEN’S THEOREM VIA RIEMANN SUMS JENNIE BUSKIN, PHILIP PROSAPIO, AND SCOTT A. TAYLOR ABSTRACT. We give a proof of Green’s theorem which captures the underlying intuition and which relies only on the mean value theorems for derivatives and integrals and on the change of variables theorem for double integrals. 1. INTRODUCTION The counterpoint of the discrete and continuous has been, perhaps even since Eu- clid, the essence of many mathematical fugues. Despite this, there are fundamental mathematical subjects where their voices are difficult to distinguish. For example, although early Calculus courses make much of the passage from the discrete world of average rate of change and Riemann sums to the continuous (or, more accurately, smooth) world of derivatives and integrals, by the time the student reaches the cen- tral material of vector calculus: scalar fields, vector fields, and their integrals over curves and surfaces, the voice of discrete mathematics has been obscured by the coloratura of continuous mathematics. Our aim in this article is to restore the bal- ance of the voices by showing how Green’s Theorem can be understood from the discrete point of view. Although Green’s Theorem admits many generalizations (the most important un- doubtedly being the Generalized Stokes’ Theorem from the theory of differentiable manifolds), we restrict ourselves to one of its simplest forms: Green’s Theorem. Let S ⊂ R2 be a compact surface bounded by (finitely many) simple closed piecewise C1 curves oriented so that S is on their left. Suppose that M F = is a C1 vector field defined on an open set U containing S. -

External Aerodynamics of the Magnetosphere
’ .., NASA TECHNICAL NOTE NASA TN- I- &: I -I LOAN COPY: R AFWL (W KIRTLAND AFI EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE by John R. Spreiter, A Zbertu Y. A Zksne, and Audrey L. Summers Awes Research Center Moffett Fie@ CuZ$ NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. JUNE 1968 i TECH LIBRARY KAFB, NM Illll1lllll111lll lllll lilll llll lllll 1111 Ill 0133359 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center Moffett Field, Calif. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTl price $3.00 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE* By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center SUMMARY A comprehensive survey is given of the continuum fluid theory of the solar wind and its interaction with the Earth's magnetic field, and the rela- tion between the calculated results and those actually measured in space. A unified basis for the entire discussion is provided by the equations of mag- netohydrodynamics, augmented by relations from kinetic theory for certain small-scale details of the flow. While the full complexity of magnetohydrodynamics is required for the formulation of the model and the establishment of the proper conditions to apply at the magnetosphere boundary, it is shown that the magnetic field actually experienced in space is usually sufficiently small that an adequate approximation to the solution can be obtained by first solving the simpler equations of gasdynamics for the flow and then using the results to calculate the deformation of the magnetic field. -

Stokes' Theorem
V13.3 Stokes’ Theorem 3. Proof of Stokes’ Theorem. We will prove Stokes’ theorem for a vector field of the form P (x, y, z) k . That is, we will show, with the usual notations, (3) P (x, y, z) dz = curl (P k ) · n dS . � C � �S We assume S is given as the graph of z = f(x, y) over a region R of the xy-plane; we let C be the boundary of S, and C ′ the boundary of R. We take n on S to be pointing generally upwards, so that |n · k | = n · k . To prove (3), we turn the left side into a line integral around C ′, and the right side into a double integral over R, both in the xy-plane. Then we show that these two integrals are equal by Green’s theorem. To calculate the line integrals around C and C ′, we parametrize these curves. Let ′ C : x = x(t), y = y(t), t0 ≤ t ≤ t1 be a parametrization of the curve C ′ in the xy-plane; then C : x = x(t), y = y(t), z = f(x(t), y(t)), t0 ≤ t ≤ t1 gives a corresponding parametrization of the space curve C lying over it, since C lies on the surface z = f(x, y). Attacking the line integral first, we claim that (4) P (x, y, z) dz = P (x, y, f(x, y))(fxdx + fydy) . � C � C′ This looks reasonable purely formally, since we get the right side by substituting into the left side the expressions for z and dz in terms of x and y: z = f(x, y), dz = fxdx + fydy. -

Generalized Stokes' Theorem
Chapter 4 Generalized Stokes’ Theorem “It is very difficult for us, placed as we have been from earliest childhood in a condition of training, to say what would have been our feelings had such training never taken place.” Sir George Stokes, 1st Baronet 4.1. Manifolds with Boundary We have seen in the Chapter 3 that Green’s, Stokes’ and Divergence Theorem in Multivariable Calculus can be unified together using the language of differential forms. In this chapter, we will generalize Stokes’ Theorem to higher dimensional and abstract manifolds. These classic theorems and their generalizations concern about an integral over a manifold with an integral over its boundary. In this section, we will first rigorously define the notion of a boundary for abstract manifolds. Heuristically, an interior point of a manifold locally looks like a ball in Euclidean space, whereas a boundary point locally looks like an upper-half space. n 4.1.1. Smooth Functions on Upper-Half Spaces. From now on, we denote R+ := n n f(u1, ... , un) 2 R : un ≥ 0g which is the upper-half space of R . Under the subspace n n n topology, we say a subset V ⊂ R+ is open in R+ if there exists a set Ve ⊂ R open in n n n R such that V = Ve \ R+. It is intuitively clear that if V ⊂ R+ is disjoint from the n n n subspace fun = 0g of R , then V is open in R+ if and only if V is open in R . n n Now consider a set V ⊂ R+ which is open in R+ and that V \ fun = 0g 6= Æ. -

Metrics Defined by Bregman Divergences †
1 METRICS DEFINED BY BREGMAN DIVERGENCES y PENGWEN CHEN z AND YUNMEI CHEN, MURALI RAOx Abstract. Bregman divergences are generalizations of the well known Kullback Leibler diver- gence. They are based on convex functions and have recently received great attention. We present a class of \squared root metrics" based on Bregman divergences. They can be regarded as natural generalization of Euclidean distance. We provide necessary and sufficient conditions for a convex function so that the square root of its associated average Bregman divergence is a metric. Key words. Metrics, Bregman divergence, Convexity subject classifications. Analysis of noise-corrupted data, is difficult without interpreting the data to have been randomly drawn from some unknown distribution with unknown parameters. The most common assumption on noise is Gaussian distribution. However, it may be inappropriate if data is binary-valued or integer-valued or nonnegative. Gaussian is a member of the exponential family. Other members of this family for example the Poisson and the Bernoulli are better suited for integer and binary data. Exponential families and Bregman divergences ( Definition 1.1 ) have a very intimate relationship. There exists a unique Bregman divergence corresponding to every regular exponential family [13][3]. More precisely, the log-likelihood of an exponential family distribution can be represented by a sum of a Bregman divergence and a parameter unrelated term. Hence, Bregman divergence provides a likelihood distance for exponential family in some sense. This property has been used in generalizing principal component analysis to the Exponential family [7]. The Bregman divergence however is not a metric, because it is not symmetric, and does not satisfy the triangle inequality. -
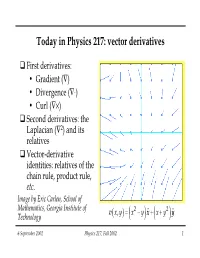
Today in Physics 217: Vector Derivatives
Today in Physics 217: vector derivatives First derivatives: • Gradient (—) • Divergence (—◊) •Curl (—¥) Second derivatives: the Laplacian (—2) and its relatives Vector-derivative identities: relatives of the chain rule, product rule, etc. Image by Eric Carlen, School of Mathematics, Georgia Institute of 22 vxyxy, =−++ x yˆˆ x y Technology ()()() 6 September 2002 Physics 217, Fall 2002 1 Differential vector calculus df/dx provides us with information on how quickly a function of one variable, f(x), changes. For instance, when the argument changes by an infinitesimal amount, from x to x+dx, f changes by df, given by df df= dx dx In three dimensions, the function f will in general be a function of x, y, and z: f(x, y, z). The change in f is equal to ∂∂∂fff df=++ dx dy dz ∂∂∂xyz ∂∂∂fff =++⋅++ˆˆˆˆˆˆ xyzxyz ()()dx() dy() dz ∂∂∂xyz ≡⋅∇fdl 6 September 2002 Physics 217, Fall 2002 2 Differential vector calculus (continued) The vector derivative operator — (“del”) ∂∂∂ ∇ =++xyzˆˆˆ ∂∂∂xyz produces a vector when it operates on scalar function f(x,y,z). — is a vector, as we can see from its behavior under coordinate rotations: I ′ ()∇∇ff=⋅R but its magnitude is not a number: it is an operator. 6 September 2002 Physics 217, Fall 2002 3 Differential vector calculus (continued) There are three kinds of vector derivatives, corresponding to the three kinds of multiplication possible with vectors: Gradient, the analogue of multiplication by a scalar. ∇f Divergence, like the scalar (dot) product. ∇⋅v Curl, which corresponds to the vector (cross) product. ∇×v 6 September 2002 Physics 217, Fall 2002 4 Gradient The result of applying the vector derivative operator on a scalar function f is called the gradient of f: ∂∂∂fff ∇f =++xyzˆˆˆ ∂∂∂xyz The direction of the gradient points in the direction of maximum increase of f (i.e. -

Divergence and Integral Tests Handout Reference: Brigg’S “Calculus: Early Transcendentals, Second Edition” Topics: Section 8.4: the Divergence and Integral Tests, P
Lesson 17: Divergence and Integral Tests Handout Reference: Brigg's \Calculus: Early Transcendentals, Second Edition" Topics: Section 8.4: The Divergence and Integral Tests, p. 627 - 640 Theorem 8.8. p. 627 Divergence Test P If the infinite series ak converges, then lim ak = 0. k!1 P Equivalently, if lim ak 6= 0, then the infinite series ak diverges. k!1 Note: The divergence test cannot be used to conclude that a series converges. This test ONLY provides a quick mechanism to check for divergence. Definition. p. 628 Harmonic Series 1 1 1 1 1 1 The famous harmonic series is given by P = 1 + + + + + ··· k=1 k 2 3 4 5 Theorem 8.9. p. 630 Harmonic Series 1 1 The harmonic series P diverges, even though the terms of the series approach zero. k=1 k Theorem 8.10. p. 630 Integral Test Suppose the function f(x) satisfies the following three conditions for x ≥ 1: i. f(x) is continuous ii. f(x) is positive iii. f(x) is decreasing Suppose also that ak = f(k) for all k 2 N. Then 1 1 X Z ak and f(x)dx k=1 1 either both converge or both diverge. In the case of convergence, the value of the integral is NOT equal to the value of the series. Note: The Integral Test is used to determine whether a series converges or diverges. For this reason, adding or subtracting a finite number of terms in the series or changing the lower limit of the integration to another finite point does not change the outcome of the test.