Long Term Memory Assistance for Evolutionary Algorithms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metaheuristics1
METAHEURISTICS1 Kenneth Sörensen University of Antwerp, Belgium Fred Glover University of Colorado and OptTek Systems, Inc., USA 1 Definition A metaheuristic is a high-level problem-independent algorithmic framework that provides a set of guidelines or strategies to develop heuristic optimization algorithms (Sörensen and Glover, To appear). Notable examples of metaheuristics include genetic/evolutionary algorithms, tabu search, simulated annealing, and ant colony optimization, although many more exist. A problem-specific implementation of a heuristic optimization algorithm according to the guidelines expressed in a metaheuristic framework is also referred to as a metaheuristic. The term was coined by Glover (1986) and combines the Greek prefix meta- (metá, beyond in the sense of high-level) with heuristic (from the Greek heuriskein or euriskein, to search). Metaheuristic algorithms, i.e., optimization methods designed according to the strategies laid out in a metaheuristic framework, are — as the name suggests — always heuristic in nature. This fact distinguishes them from exact methods, that do come with a proof that the optimal solution will be found in a finite (although often prohibitively large) amount of time. Metaheuristics are therefore developed specifically to find a solution that is “good enough” in a computing time that is “small enough”. As a result, they are not subject to combinatorial explosion – the phenomenon where the computing time required to find the optimal solution of NP- hard problems increases as an exponential function of the problem size. Metaheuristics have been demonstrated by the scientific community to be a viable, and often superior, alternative to more traditional (exact) methods of mixed- integer optimization such as branch and bound and dynamic programming. -

Genetic Programming: Theory, Implementation, and the Evolution of Unconstrained Solutions
Genetic Programming: Theory, Implementation, and the Evolution of Unconstrained Solutions Alan Robinson Division III Thesis Committee: Lee Spector Hampshire College Jaime Davila May 2001 Mark Feinstein Contents Part I: Background 1 INTRODUCTION................................................................................................7 1.1 BACKGROUND – AUTOMATIC PROGRAMMING...................................................7 1.2 THIS PROJECT..................................................................................................8 1.3 SUMMARY OF CHAPTERS .................................................................................8 2 GENETIC PROGRAMMING REVIEW..........................................................11 2.1 WHAT IS GENETIC PROGRAMMING: A BRIEF OVERVIEW ...................................11 2.2 CONTEMPORARY GENETIC PROGRAMMING: IN DEPTH .....................................13 2.3 PREREQUISITE: A LANGUAGE AMENABLE TO (SEMI) RANDOM MODIFICATION ..13 2.4 STEPS SPECIFIC TO EACH PROBLEM.................................................................14 2.4.1 Create fitness function ..........................................................................14 2.4.2 Choose run parameters.........................................................................16 2.4.3 Select function / terminals.....................................................................17 2.5 THE GENETIC PROGRAMMING ALGORITHM IN ACTION .....................................18 2.5.1 Generate random population ................................................................18 -

Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space
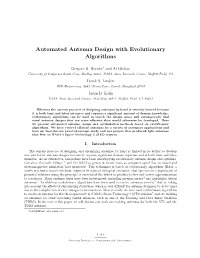
Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space Matthew C. Fontaine Julian Togelius Viterbi School of Engineering Tandon School of Engineering University of Southern California New York University Los Angeles, CA New York City, NY [email protected] [email protected] Stefanos Nikolaidis Amy K. Hoover Viterbi School of Engineering Ying Wu College of Computing University of Southern California New Jersey Institute of Technology Los Angeles, CA Newark, NJ [email protected] [email protected] ABSTRACT We focus on the challenge of finding a diverse collection of quality solutions on complex continuous domains. While quality diver- sity (QD) algorithms like Novelty Search with Local Competition (NSLC) and MAP-Elites are designed to generate a diverse range of solutions, these algorithms require a large number of evaluations for exploration of continuous spaces. Meanwhile, variants of the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) are among the best-performing derivative-free optimizers in single- objective continuous domains. This paper proposes a new QD algo- rithm called Covariance Matrix Adaptation MAP-Elites (CMA-ME). Figure 1: Comparing Hearthstone Archives. Sample archives Our new algorithm combines the self-adaptation techniques of for both MAP-Elites and CMA-ME from the Hearthstone ex- CMA-ES with archiving and mapping techniques for maintaining periment. Our new method, CMA-ME, both fills more cells diversity in QD. Results from experiments based on standard con- in behavior space and finds higher quality policies to play tinuous optimization benchmarks show that CMA-ME finds better- Hearthstone than MAP-Elites. Each grid cell is an elite (high quality solutions than MAP-Elites; similarly, results on the strategic performing policy) and the intensity value represent the game Hearthstone show that CMA-ME finds both a higher overall win rate across 200 games against difficult opponents. -

A Hybrid LSTM-Based Genetic Programming Approach for Short-Term Prediction of Global Solar Radiation Using Weather Data
processes Article A Hybrid LSTM-Based Genetic Programming Approach for Short-Term Prediction of Global Solar Radiation Using Weather Data Rami Al-Hajj 1,* , Ali Assi 2 , Mohamad Fouad 3 and Emad Mabrouk 1 1 College of Engineering and Technology, American University of the Middle East, Egaila 54200, Kuwait; [email protected] 2 Independent Researcher, Senior IEEE Member, Montreal, QC H1X1M4, Canada; [email protected] 3 Department of Computer Engineering, University of Mansoura, Mansoura 35516, Egypt; [email protected] * Correspondence: [email protected] or [email protected] Abstract: The integration of solar energy in smart grids and other utilities is continuously increasing due to its economic and environmental benefits. However, the uncertainty of available solar energy creates challenges regarding the stability of the generated power the supply-demand balance’s consistency. An accurate global solar radiation (GSR) prediction model can ensure overall system reliability and power generation scheduling. This article describes a nonlinear hybrid model based on Long Short-Term Memory (LSTM) models and the Genetic Programming technique for short-term prediction of global solar radiation. The LSTMs are Recurrent Neural Network (RNN) models that are successfully used to predict time-series data. We use these models as base predictors of GSR using weather and solar radiation (SR) data. Genetic programming (GP) is an evolutionary heuristic computing technique that enables automatic search for complex solution formulas. We use the GP Citation: Al-Hajj, R.; Assi, A.; Fouad, in a post-processing stage to combine the LSTM models’ outputs to find the best prediction of the M.; Mabrouk, E. -

A Genetic Programming-Based Low-Level Instructions Robot for Realtimebattle
entropy Article A Genetic Programming-Based Low-Level Instructions Robot for Realtimebattle Juan Romero 1,2,* , Antonino Santos 3 , Adrian Carballal 1,3 , Nereida Rodriguez-Fernandez 1,2 , Iria Santos 1,2 , Alvaro Torrente-Patiño 3 , Juan Tuñas 3 and Penousal Machado 4 1 CITIC-Research Center of Information and Communication Technologies, University of A Coruña, 15071 A Coruña, Spain; [email protected] (A.C.); [email protected] (N.R.-F.); [email protected] (I.S.) 2 Department of Computer Science and Information Technologies, Faculty of Communication Science, University of A Coruña, Campus Elviña s/n, 15071 A Coruña, Spain 3 Department of Computer Science and Information Technologies, Faculty of Computer Science, University of A Coruña, Campus Elviña s/n, 15071 A Coruña, Spain; [email protected] (A.S.); [email protected] (A.T.-P.); [email protected] (J.T.) 4 Centre for Informatics and Systems of the University of Coimbra (CISUC), DEI, University of Coimbra, 3030-790 Coimbra, Portugal; [email protected] * Correspondence: [email protected] Received: 26 November 2020; Accepted: 30 November 2020; Published: 30 November 2020 Abstract: RealTimeBattle is an environment in which robots controlled by programs fight each other. Programs control the simulated robots using low-level messages (e.g., turn radar, accelerate). Unlike other tools like Robocode, each of these robots can be developed using different programming languages. Our purpose is to generate, without human programming or other intervention, a robot that is highly competitive in RealTimeBattle. To that end, we implemented an Evolutionary Computation technique: Genetic Programming. -
Automated Antenna Design with Evolutionary Algorithms
Automated Antenna Design with Evolutionary Algorithms Gregory S. Hornby∗ and Al Globus University of California Santa Cruz, Mailtop 269-3, NASA Ames Research Center, Moffett Field, CA Derek S. Linden JEM Engineering, 8683 Cherry Lane, Laurel, Maryland 20707 Jason D. Lohn NASA Ames Research Center, Mail Stop 269-1, Moffett Field, CA 94035 Whereas the current practice of designing antennas by hand is severely limited because it is both time and labor intensive and requires a significant amount of domain knowledge, evolutionary algorithms can be used to search the design space and automatically find novel antenna designs that are more effective than would otherwise be developed. Here we present automated antenna design and optimization methods based on evolutionary algorithms. We have evolved efficient antennas for a variety of aerospace applications and here we describe one proof-of-concept study and one project that produced fight antennas that flew on NASA's Space Technology 5 (ST5) mission. I. Introduction The current practice of designing and optimizing antennas by hand is limited in its ability to develop new and better antenna designs because it requires significant domain expertise and is both time and labor intensive. As an alternative, researchers have been investigating evolutionary antenna design and optimiza- tion since the early 1990s,1{3 and the field has grown in recent years as computer speed has increased and electromagnetics simulators have improved. This techniques is based on evolutionary algorithms (EAs), a family stochastic search methods, inspired by natural biological evolution, that operate on a population of potential solutions using the principle of survival of the fittest to produce better and better approximations to a solution. -

Evolutionary Algorithms
Evolutionary Algorithms Dr. Sascha Lange AG Maschinelles Lernen und Naturlichsprachliche¨ Systeme Albert-Ludwigs-Universit¨at Freiburg [email protected] Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (1) Acknowlegements and Further Reading These slides are mainly based on the following three sources: I A. E. Eiben, J. E. Smith, Introduction to Evolutionary Computing, corrected reprint, Springer, 2007 — recommendable, easy to read but somewhat lengthy I B. Hammer, Softcomputing,LectureNotes,UniversityofOsnabruck,¨ 2003 — shorter, more research oriented overview I T. Mitchell, Machine Learning, McGraw Hill, 1997 — very condensed introduction with only a few selected topics Further sources include several research papers (a few important and / or interesting are explicitly cited in the slides) and own experiences with the methods described in these slides. Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (2) ‘Evolutionary Algorithms’ (EA) constitute a collection of methods that originally have been developed to solve combinatorial optimization problems. They adapt Darwinian principles to automated problem solving. Nowadays, Evolutionary Algorithms is a subset of Evolutionary Computation that itself is a subfield of Artificial Intelligence / Computational Intelligence. Evolutionary Algorithms are those metaheuristic optimization algorithms from Evolutionary Computation that are population-based and are inspired by natural evolution.Typicalingredientsare: I A population (set) of individuals (the candidate solutions) I Aproblem-specificfitness (objective function to be optimized) I Mechanisms for selection, recombination and mutation (search strategy) There is an ongoing controversy whether or not EA can be considered a machine learning technique. They have been deemed as ‘uninformed search’ and failing in the sense of learning from experience (‘never make an error twice’). -

Computational Creativity: Three Generations of Research and Beyond
Computational Creativity: Three Generations of Research and Beyond Debasis Mitra Department of Computer Science Florida Institute of Technology [email protected] Abstract In this article we have classified computational creativity research activities into three generations. Although the 2. Philosophical Angles respective system developers were not necessarily targeting Philosophers try to understand creativity from the their research for computational creativity, we consider their works as contribution to this emerging field. Possibly, the historical perspectives – how different acts of creativity first recognition of the implication of intelligent systems (primarily in science) might have happened. Historical toward the creativity came with an AAAI Spring investigation of the process involved in scientific discovery Symposium on AI and Creativity (Dartnall and Kim, 1993). relied heavily on philosophical viewpoints. Within We have here tried to chart the progress of the field by philosophy there is an ongoing old debate regarding describing some sample projects. Our hope is that this whether the process of scientific discovery has a normative article will provide some direction to the interested basis. Within the computing community this question researchers and help creating a vision for the community. transpires in asking if analyzing and computationally emulating creativity is feasible or not. In order to answer this question artificial intelligence (AI) researchers have 1. Introduction tried to develop computing systems to mimic scientific One of the meanings of the word “create” is “to produce by discovery processes (e.g., BACON, KEKADA, etc. that we imaginative skill” and that of the word “creativity” is “the will discuss), almost since the beginning of the inception of ability to create,’ according to the Webster Dictionary. -

Geometric Semantic Genetic Programming Algorithm and Slump Prediction
Geometric Semantic Genetic Programming Algorithm and Slump Prediction Juncai Xu1, Zhenzhong Shen1, Qingwen Ren1, Xin Xie2, and Zhengyu Yang2 1 College of Water Conservancy and Hydropower Engineering, Hohai University, Nanjing 210098, China 2 Department of Electrical and Engineering, Northeastern University, Boston, MA 02115, USA ABSTRACT Research on the performance of recycled concrete as building material in the current world is an important subject. Given the complex composition of recycled concrete, conventional methods for forecasting slump scarcely obtain satisfactory results. Based on theory of nonlinear prediction method, we propose a recycled concrete slump prediction model based on geometric semantic genetic programming (GSGP) and combined it with recycled concrete features. Tests show that the model can accurately predict the recycled concrete slump by using the established prediction model to calculate the recycled concrete slump with different mixing ratios in practical projects and by comparing the predicted values with the experimental values. By comparing the model with several other nonlinear prediction models, we can conclude that GSGP has higher accuracy and reliability than conventional methods. Keywords: recycled concrete; geometric semantics; genetic programming; slump 1. Introduction The rapid development of the construction industry has resulted in a huge demand for concrete, which, in turn, caused overexploitation of natural sand and gravel as well as serious damage to the ecological environment. Such demand produces a large amount of waste concrete in construction, entailing high costs for dealing with these wastes 1-3. In recent years, various properties of recycled concrete were validated by researchers from all over the world to protect the environment and reduce processing costs. -

A Genetic Programming Strategy to Induce Logical Rules for Clinical Data Analysis
processes Article A Genetic Programming Strategy to Induce Logical Rules for Clinical Data Analysis José A. Castellanos-Garzón 1,2,*, Yeray Mezquita Martín 1, José Luis Jaimes Sánchez 3, Santiago Manuel López García 3 and Ernesto Costa 2 1 Department of Computer Science and Automatic, Faculty of Sciences, BISITE Research Group, University of Salamanca, Plaza de los Caídos, s/n, 37008 Salamanca, Spain; [email protected] 2 CISUC, Department of Computer Engineering, ECOS Research Group, University of Coimbra, Pólo II - Pinhal de Marrocos, 3030-290 Coimbra, Portugal; [email protected] 3 Instituto Universitario de Estudios de la Ciencia y la Tecnología, University of Salamanca, 37008 Salamanca, Spain; [email protected] (J.L.J.S.); [email protected] (S.M.L.G.) * Correspondence: [email protected] Received: 31 October 2020; Accepted: 26 November 2020; Published: 27 November 2020 Abstract: This paper proposes a machine learning approach dealing with genetic programming to build classifiers through logical rule induction. In this context, we define and test a set of mutation operators across from different clinical datasets to improve the performance of the proposal for each dataset. The use of genetic programming for rule induction has generated interesting results in machine learning problems. Hence, genetic programming represents a flexible and powerful evolutionary technique for automatic generation of classifiers. Since logical rules disclose knowledge from the analyzed data, we use such knowledge to interpret the results and filter the most important features from clinical data as a process of knowledge discovery. The ultimate goal of this proposal is to provide the experts in the data domain with prior knowledge (as a guide) about the structure of the data and the rules found for each class, especially to track dichotomies and inequality. -

Evolving Evolutionary Algorithms Using Linear Genetic Programming
Evolving Evolutionary Algorithms Using Linear Genetic Programming Mihai Oltean [email protected] Department of Computer Science, Babes¸-Bolyai University, Kogalniceanu 1, Cluj- Napoca 3400, Romania Abstract A new model for evolving Evolutionary Algorithms is proposed in this paper. The model is based on the Linear Genetic Programming (LGP) technique. Every LGP chro- mosome encodes an EA which is used for solving a particular problem. Several Evolu- tionary Algorithms for function optimization, the Traveling Salesman Problem and the Quadratic Assignment Problem are evolved by using the considered model. Numeri- cal experiments show that the evolved Evolutionary Algorithms perform similarly and sometimes even better than standard approaches for several well-known benchmark- ing problems. Keywords Genetic algorithms, genetic programming, linear genetic programming, evolving evo- lutionary algorithms 1 Introduction Evolutionary Algorithms (EAs) (Goldberg, 1989; Holland, 1975) are new and powerful tools used for solving difficult real-world problems. They have been developed in or- der to solve some real-world problems that the classical (mathematical) methods failed to successfully tackle. Many of these unsolved problems are (or could be turned into) optimization problems. The solving of an optimization problem means finding solu- tions that maximize or minimize a criteria function (Goldberg, 1989; Holland, 1975; Yao et al., 1999). Many Evolutionary Algorithms have been proposed for dealing with optimization problems. Many solution representations -

Evolutionary Algorithms in Intelligent Systems
mathematics Editorial Evolutionary Algorithms in Intelligent Systems Alfredo Milani Department of Mathematics and Computer Science, University of Perugia, 06123 Perugia, Italy; [email protected] Received: 17 August 2020; Accepted: 29 August 2020; Published: 10 October 2020 Evolutionary algorithms and metaheuristics are widely used to provide efficient and effective approximate solutions to computationally difficult optimization problems. Successful early applications of the evolutionary computational approach can be found in the field of numerical optimization, while they have now become pervasive in applications for planning, scheduling, transportation and logistics, vehicle routing, packing problems, etc. With the widespread use of intelligent systems in recent years, evolutionary algorithms have been applied, beyond classical optimization problems, as components of intelligent systems for supporting tasks and decisions in the fields of machine vision, natural language processing, parameter optimization for neural networks, and feature selection in machine learning systems. Moreover, they are also applied in areas like complex network dynamics, evolution and trend detection in social networks, emergent behavior in multi-agent systems, and adaptive evolutionary user interfaces to mention a few. In these systems, the evolutionary components are integrated into the overall architecture and they provide services to the specific algorithmic solutions. This paper selection aims to provide a broad view of the role of evolutionary algorithms and metaheuristics in artificial intelligent systems. A first relevant issue discussed in the volume is the role of multi-objective meta-optimization of evolutionary algorithms (EA) in continuous domains. The challenging tasks of EA parameter tuning are the many different details that affect EA performance, such as the properties of the fitness function as well as time and computational constraints.