MMG Sensor for Muscle Activity Detection – Low Cost Design, Implementation and Experimentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

GML 2032 Microphone Preamplifier / Parametric Equalizer
G e o r g e M a s s e n b u r g L a b s GML 2032 Microphone Preamplifier / Parametric Equalizer The Model 2032 Microphone Preamplifier / Parametric Equalizer is a single-channel, multi-input device for high-resolution studio and remote applications. Incorporating the renowned 8300 preamplifier and reference-standard 8200 equalizer, the Model 2032 inherits over thirty years of GML engineering excellence. This transparent class-A discrete design with internal supply delivers reliability, musicality, and precision. Owner's Manual Version 1.0 August, 2004 All materials herein © George Massenburg Labs, LLC. GML, LLC. Franklin, TN USA 615.790.9946 (ph) www.massenburg.com INTRODUCTION Combining the features of the GML flagship 8200 Parametric Equalizer and 8300 Transformerless Microphone Preamplifier, the Model 2032 embodies the legendary detail and accuracy for which GML is renowned. The power and functionality of these revolutionary processors is further coupled with the addition of a front panel musical instrument input, two position high-pass filter, front panel phantom and phase switching, and flexible routing options while maintaining the GML standard of performance and transparency. These advanced circuits, envisioned by George Massenburg, have benefited from over 30 years of research, limited manufacturing, critical listening analysis, widespread usage by demanding industry professionals, and continuous evaluation by the GML Engineering Department. FEATURES The GML Model 2032 Microphone Preamplifier / Parametric Equalizer derives its -

Productcatalog
PRODUCTCATALOG We supply sound, not equipment. www.toaelectronics.com Life SafetyLife Intercom Life Safety 06 VM-3000 Series Integrated Voice Evacuation System 07 VM-3000 Series Integrated Voice Evacuation System Optional Accessories 10 SX-2000 Series Audio Management System 10 SX-2000 Series Audio Management System Optional Accessories 14 SX-2000 Series Audio Management System Modules 16 Mass Notification and Fire/Voice System Speaker Certifications Intercom 20 N-SP80 SIP Intercom Series 28 N-8000 Series Exchanges and Interface Units 22 N-8000 Series SIP Gateway 30 N-8000 Series 2-Core Shielded Cable Type 23 N-8000 Series IP Master Stations 32 N-8000 Series 4-Wire Cable Type 24 N-8000 Series IP Door Stations 33 N-8000 Series Optional Accessories 25 N-8000 Series 2-Wire Master Stations 34 N-8000 Series Station Selection Chart 27 N-8000 Series 2-Wire Type Stations 35 N-8000 Series System Overview Network Network Network Audio 38 Audio NX-300 System 40 NX-100 System 42 Digital Message Repeaters 44 Program Timer 44 Synthesized AM/FM Tuner Amplifiers SpeakersAmplifiers & DSP Mixers 46 A-5000 Series Digital Mixer Amplifiers 56 9000 Series Modular Digital Matrix Mixer Remote Control 74 A-2240 Mixer Power Amplifier 47 MA-725F Digital Matrix Mixer Amplifier Modules 75 BG-200 Series PA Amplifiers 48 BG-2240D Class D Mixer/Amplifier 58 9000 Series Modular Digital Matrix Mixer Speaker Selectors 76 BA-200 Series PA Amplifiers 49 Digital Power Amplifiers 60 900 Series Amplifiers 77 CA Series Mobile Mixer Amplifiers 50 Digital Micro Amplifiers 63 900 -

Twin-Servo™ Microphone Preamplifier
RADIAL 500 SERIES smart sheet TWIN-SERVO™ MICROPHONE PREAMPLIFIER Order No. R700 0111 10 The Jensen Twin-Servo™ utilizes Deane Jensen’s iconic 990 op-amp design to deliver the most exceptional mic preamp built in the 500 series format. The circuitry boasts two 100% discrete 990 op-amps cascaded in tandem to deliver 60dB of gain, with incredibly low noise and phase distortion, and an ultra-wide 0.2Hz-150kHz frequency response. Jensen input and output transformers provide massive amounts of headroom, with clean and transparent operation suitable for the most critical recording applications. A 21-detent gain control makes for easy session recalls, with a 10-segment LED meter for accurate signal management. 48V phantom power, a 180° polarity reverse, high-pass fi lter and -15dB pad are also provided, all with individual LED indicators to verify settings at a glance. When it comes to high performance mic preamps, nothing beats the Jensen Twin-Servo. OMNIPORT - When used with a Radial Workhorse power rack the omniport is assigned as a unbalanced 220K ohm instrument input. FEATURES 10 SEGMENT METER - Custom designed circuit for greater VU meter accuracy. • Ultra-low noise preamp with over 60dB of gain • Built in high-pass fi lter and 180° polarity reverse DUAL-GANG POT - Simultaneously controls the dual 990 op- amp topology for optimal gain at all levels. • Dual Jensen transformers for maximum head- room 180° - Inverts pins 2 and 3 at the output to help phase align microphones when two channels are in stereo use. APPLICATIONS HPF - Gentle high-pass fi lter may be inserted into the signal • Perfect for recording any source path to reduce excessive low frequency content and control • Transparent and detailed operation resonance. -

An Improved Microphone Preamplifier Integrated Circuit
AN IMPROVED MICROPHONE PREAMPLIFIER INTEGRATED CIRCUIT FRED FLORU THAT Corporation, Milford, MA, USA The influence of the semiconductor process on the performance of a microphone preamplifier integrated circuit is described. Examples of active devices available in conventional junction isolated and newer complementary bipolar technologies are shown. The availability of such devices influences the electrical design and its complexity. The traditional microphone preamplifier topology is discussed. A new preamplifier gain structure, that extends the dynamic range by lowering the noise floor, is considered and its benefits are demonstrated. 0 INTRODUCTION 1 FABRICATION PROCESS The dynamic range required by audio professional The most common semiconductor processes for applications keeps getting larger and larger In order to professional audio ICs are Junction Isolated (JI) bipolar, keep up with the demand, the integrated circuits Dielectric Isolated (DI) bipolar and Complementary dedicated to such applications are manufactured in new Metal Oxide Silicon (CMOS). There are no high and improved semiconductor processes. The dynamic quality preamplifiers made in CMOS process. CMOS range definition is the ratio between the maximum is primarily used for ADCs, DACs and rail-to-rail signal level that can be handled by the device and the operational amplifiers intended for low voltage noise floor. The maximum signal level that can be applications. The technology of choice for microphone processed is for most designs a function of the preamplifiers has been JI bipolar. The microphone maximum power supply voltag~ allowed by the device. preamplifier described in this paper is developed in a Microphone preamplifiers, line receivers, line drivers, new complementary-bipolar DI process. -
Manley Voxbox Owner’S Manual
MANLEY VOXBOX OWNER’S MANUAL TUBES RULE MANLEY LABORATORIES, INC. 13880 MAGNOLIA AVE. CHINO, CA 91710 USA TEL: +1 (909) 627-4256 FAX: +1 (909) 628-2482 www.manley.com REV. MVBXXAxxxx rev4/2015/zf CONTENTS SECTION PAGE INTRODUCTION 3 QUICK START 4 MAINS CONNECTIONS 5 FRONT PANEL MIC PRE 6 COMPRESSOR 7 EQ & DE-ESSER 8 REAR PANEL 9 GENERAL DISCUSSION OVERVIEW AND BLOCK DIAGRAM 12 MIC PREAMP & COMPRESSOR 13 EQ & DE-ESSER 15 ADDENDUM 18 TECHNICAL DETAILS TUBE, TRIMMER LOCATIONS 19 CALIBRATION 20 TROUBLESHOOTING 21 SPECIFICATIONS 23 CURVES 24 APPENDIX 1 - TEMPLATE FOR STORING SETTINGS 26 INTRODUCTION THANK YOU!... for choosing the Manley VOXBOX. This unit is the result of our customers asking us to make a vocal oriented combination from some favorite Manley designs. We combined the Manley Mic Preampli- fier, Electro-Optical Limiter, and Mid Pultec and then went further. Uniquely, we put a compressor before a minimalist mic preamplifier. This can substantially reduce distortion while having no more sonic imprint on the signal than the mic pre by itself because the compressor is just a passive light dependent clamping resistor. For those who want the shortest path to tape, but use compressors, this has to be the ideal solution. We added attack and release controls to the compressor with some “very special” settings such as one that simulates a LA-2A, another “tuned” for drums and a setting that works like a great engineer “riding” a fader. Then we extended the PULTEC MEQ down to 20 Hz and up to 20 kHz so its not just a mid EQ anymore. -

Soundcraft GB Series Brochure
TYPICAL SPECIFICATIONS Frequency Response Mic/Line Input to any output, 20Hz - 20kHz ...................................... <1dB THD + N Mic sens. -30dBu, +20dBu at all outputs @1kHz .......................... <0.006% Noise Measured RMS, 22Hz to 22kHz Bandwidth Mic E.I.N. @ unity gain,150Ω source impedance........................... -128dBu Mix Output, 40 inputs routed to mix .............................................. <-82dBu Group & Centre Outputs ................................................................ <-83dBu Aux Outputs (GB2 Groups only) ..................................................... <-80dBu Matrix Outputs............................................................................... <-89dBu GRAHAM BLYTH Graham Blyth, Soundcraft’s co-founder and Technical Crosstalk Input Channel Mute......................................................................... <-97dB Director, has taken the well established and classic (@1kHz, typical) Input Fader cut-off........................................................................... <-95dB Pan isolation ................................................................................... <-75dB Soundcraft microphone preamplifier to a new level of Mix route isolation........................................................................... <-97dB performance, resulting in the new GB30 preamp which Group route isolation....................................................................... <-97dB boasts extraordinary clarity with exceptionally controlled Adjacent channel crosstalk............................................................. -

Phoenix Audio Ascent Two EQ
ON TEST Phoenix Audio Ascent Two EQ BOB THOMAS Dual-channel Microphone hoenix Audio’s roots lead back to their foundation in England P in 1996, as a service company Preamplifier, DI & EQ specialising in pre-1980 Neve consoles. With ex-Neve designers David Rees Though a great recording front-end, this and Shaun Leveque at the helm, it was versatile and characterful processor could just almost inevitable that the company would expand beyond building the replacements as easily find a home on your stereo mix bus... for vintage Neve output stages that made their name, to creating their own range the solid-steel chassis and the linear 0) is set to illuminate solidly at 0dB (PPM of Class-A all-discrete preamplifiers. The power supply’s toroidal transformer 4), and the other, which is yellow and first of these, in 1999, was the DRS-2 dual mean the whole ensemble adds up to marked 8, turns on on at the US broadcast microphone preamplifier, and with the a hefty package. Internally, the two sets reference level of +8dB (PPM 6), a level success of this and other new products of channel electronics sit on separate but that’s well below the Ascent Two EQ’s came challenges and opportunities. identical PCBs, each dominated by three +26dBu output capability. Consequently, under new ownership in large, resin-encased discrete op-amps and A switch-controlled TRS jack DI input 2009, Phoenix Audio moved to a new an output balancing transformer. Internal is next in line, followed by the four-band manufacturing and distribution base construction overall is of an extremely EQ’s detented rotary controls and in California’s Costa Mesa, where they high quality, as are the switches and other frequency selection switches. -

M101 Manual Reva.Pdf
m101 single channel microphone preamplifier 4689 Ute Highway, Lyons, CO 80540 USA tel 1.303.823.8100 fax 1.303.823.8101 owner’s manual Rev A [email protected] / www.gracedesign.com all contents © Grace Design/ Lunatec LLC Welcome and thanks for purchasing the Grace Design m101 microphone preamplifier and instrument DI. We design and build our products to be completely reliable and easy to use, so you can concentrate on making great recordings, not struggling with complicated equipment or difficult product manuals. While you will find the m101 is completely straightforward to use, we do ask that you spend a little time familiarizing yourself with this product manual to help avoid any common user difficulties. In the event that you do encounter any technical difficulties with this or any of our products, feel free to call us at 303-823-8100. Our office hours are 9 to 5, Monday through Friday, MST, or you may email any technical ques- tions to: [email protected]. Also, please check out our web site (www.gracedesign.com) for the latest Grace Design product information, owners manuals and technical documents. Grace Design has been building audiophile-quality products for the recording industry over 15 years. The technology in the m101 is the result of extensive listening, field-testing and careful refinement. Your new m101 preamplifier represents a combination of absolutely pristine audio performance, robust mechanical construction and bombproof reliability at a reasonable price. Regardless of what audio sources you plan to record, your m101 will faithfully serve as an invisible link between your microphone or instrument and recording device. -
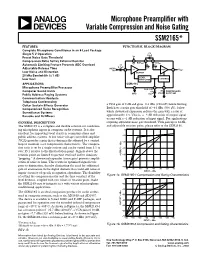
Microphone Preamplifier with Variable Compression and Noise Gating
Microphone Preamplifier with a Variable Compression and Noise Gating SSM2165* FEATURES FUNCTIONAL BLOCK DIAGRAM Complete Microphone Conditioner in an 8-Lead Package C2 Single 5 V Operation 10F Preset Noise Gate Threshold V+ + Compression Ratio Set by External Resistor V+ BUFOUT VCAIN Automatic Limiting Feature Prevents ADC Overload C1 RA RA 0.1F AUDIO 2 2 Adjustable Release Time +1 V IN+ VCA OUT Low Noise and Distortion BUFFER (kHz Bandwidth (؎1 dB 20 LEVEL Low Cost DETECTOR CONTROL APPLICATIONS SSM2165 Microphone Preamplifier/Processor AVG CAP Computer Sound Cards C3 + R1 COMPRESSION 25k⍀ Public Address/Paging Systems GND 22F RATIO SET Communication Headsets Telephone Conferencing Guitar Sustain Effects Generator a VCA gain of 8 dB and gives –9.8 dBu (250 mV) before limiting. µ Computerized Voice Recognition Both have a noise gate threshold of –64 dBu (500 V), below Surveillance Systems which downward expansion reduces the gain with a ratio of Karaoke and DJ Mixers approximately 1:3. That is, a –3 dB reduction of output signal occurs with a –1 dB reduction of input signal. For applications GENERAL DESCRIPTION requiring adjustable noise gate threshold, VCA gain up to 18 dB, The SSM2165 is a complete and flexible solution for condition- and adjustable rotation point, please refer to the SSM2166. ing microphone inputs in computer audio systems. It is also 0 excellent for improving vocal clarity in communications and public address systems. A low noise voltage controlled amplifier –10 (VCA) provides a gain that is dynamically adjusted by a control –20 loop to maintain a set compression characteristic. -

Manualslib.Com Manuals Search Engine
Downloaded from www.Manualslib.com pro manuals search engine for Professional Recording for Professional Ultimate USB & XLR Microphone Ultimate yeti 3 desktop or studio, Congratulations on your purchase of Yeti Pro, the first microphone to combine the exceptional detail of 192kHz/24 bit USB audio recording with the ability to output to traditional analog audio equipment. Yeti Pro is the ultimate the possibilities are endless tool for creating amazing recordings, no matter what the sound source, environment, or destination. Yeti Pro . features Blue’s innovative triple capsule array, allowing for recording in stereo or your choice of three unique patterns, including cardioid, omnidirectional, and bidirectional, giving you recording capabilities typically requiring multiple microphones. The Yeti Pro can connect to any analog equipment with a phantom powered XLR connection, or directly to your computer via USB, eliminating the need for any additional audio interface equipment. For digital recording, Yeti Pro utilizes a high quality 192kHz/24-bit analog-to-digital converter to send remarkable audio fidelity directly into your computer, while a built-in headphone amplifier provides for zero- latency monitoring. Simple controls for headphone volume, pattern selection, instantaneous mute, and microphone gain are located directly on the microphone so you are always in control of your recording. Yeti Pro’s next generation design provides incredibly low distortion, high fidelity, and balanced frequency response. Downloaded from www.Manualslib.com manuals search engine Getting to know your Yeti PRO 4 5 Triple Capsule Array • Three condenser capsules in an innovative configuration to enable great recordings in most sensitivity. However, in analog mode, Blue recommends making gain adjustments in your preamplifier or interface any situation. -

500 Series Microphone Preamplifier 502
Product Information Document Microphone Preamplifiers 500 SERIES MICROPHONE PREAMPLIFIER 502 500 Series Modular MIDAS Microphone Preamplifier with Classic XL4 Filters ## High performance, compact 500 Series premium MIDAS microphone/line preamplifier ## Award-winning MIDAS amp has In response to the many customer been enhanced with quad discrete ultra low noise input transistors requests received over the years, the award-winning MIDAS Microphone ## Legendary MIDAS input allows up to +24 dBu signal levels with no pad Preamp is now available as an while featuring the much loved soft add-on to any mobile or recording clipping characteristic system. When used in conjunction ## Classic MIDAS XL4 swept low and high pass filters with independent with the LEGEND L10 or L6 500 selection switches Series Rackmount Chassis, the ## Switchable electronic or discrete MICROPHONE PREAMPLIFIER 502 transistor driven transformer provides the ideal solution for users balanced output for sonic flexibility seeking the legendary MIDAS sound ## Unique twin precision 11 segment LED circular input and output in a modular format that boasts upgraded, premium-quality performance. level metering Additionally, the 502 module utilises the same swept low and high pass ## High accuracy rotary switch gain filters found in the iconic XL4 Live Performance Mixing Console. control with 60 dB range in 5 dB steps ## Output gain trim with ±20 dB range Award-Winning Mic Preamp controls input and output stage colouration The MIDAS Microphone Preamplifier is considered by leading live sound and recording ## Total gain range is an amazing engineers as the very essence of the famous -20 dB to +80 dB easily MIDAS sound. Decades of design experience accommodating low output mics paired with premium-grade components is ## Large gain trim knobs provide the foundation of that acclaimed warmth and precise control of input and depth, which brings out subtle ambience, output gains maintains spatial positioning, and more effectively captures a precise sound image. -

LABORATORY #1: Microphone Preamplifier
ECE331: Electronic Circuits University of Toronto Winter 2012 LABORATORY #1: Microphone Preamplifier INTRODUCTION Transducers such as a microphones produce electric signals that are too small for direct reliable processing and must first be amplified. Microphones have an output impedance of typically 200 and output signal levels around 1 to 10 mV. A preamplifier is used to boost the audio signal level from the microphone to a level suitable for driving the A/D converter (typically to the standard 1 V peak-to-peak). Hence, in function, the preamplifier is simply an audio amplifier1. However, because the preamplifier is the first gain stage in the system, its noise contribution directly adds to that of the system2. Therefore, the preamplifier should not introduce any appreciable noise while amplifying the signal. Using a general-purpose opamp in the inverting and noninverting amplifier configurations, shown in Fig. 2.5 and Fig. 2.12 of the text, may not be quite adequate. First, these opamps generally introduce considerable noise into the amplified signal. Second, audio systems may require gains as large as 60 dB at frequencies in excess of 3 kHz, which might be difficult to achieve using some general-purpose opamps. For example, the classical 741 opamp (discussed in Sections 9.3-9.6 of Sedra & Smith) has an open-loop dc gain of 107.7 dB and a unity-gain frequency of about 1 MHz. Using this opamp in the inverting configuration of Fig 2.5 in Sedra & Smith results in an amplifier with a 3-dB frequency of only 1 kHz (see equation 2.35 in Sedra & Smith).