The JPL Lunar Gravity Field to Spherical Harmonic Degree 660 from The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

LCROSS (Lunar Crater Observation and Sensing Satellite) Observation Campaign: Strategies, Implementation, and Lessons Learned
Space Sci Rev DOI 10.1007/s11214-011-9759-y LCROSS (Lunar Crater Observation and Sensing Satellite) Observation Campaign: Strategies, Implementation, and Lessons Learned Jennifer L. Heldmann · Anthony Colaprete · Diane H. Wooden · Robert F. Ackermann · David D. Acton · Peter R. Backus · Vanessa Bailey · Jesse G. Ball · William C. Barott · Samantha K. Blair · Marc W. Buie · Shawn Callahan · Nancy J. Chanover · Young-Jun Choi · Al Conrad · Dolores M. Coulson · Kirk B. Crawford · Russell DeHart · Imke de Pater · Michael Disanti · James R. Forster · Reiko Furusho · Tetsuharu Fuse · Tom Geballe · J. Duane Gibson · David Goldstein · Stephen A. Gregory · David J. Gutierrez · Ryan T. Hamilton · Taiga Hamura · David E. Harker · Gerry R. Harp · Junichi Haruyama · Morag Hastie · Yutaka Hayano · Phillip Hinz · Peng K. Hong · Steven P. James · Toshihiko Kadono · Hideyo Kawakita · Michael S. Kelley · Daryl L. Kim · Kosuke Kurosawa · Duk-Hang Lee · Michael Long · Paul G. Lucey · Keith Marach · Anthony C. Matulonis · Richard M. McDermid · Russet McMillan · Charles Miller · Hong-Kyu Moon · Ryosuke Nakamura · Hirotomo Noda · Natsuko Okamura · Lawrence Ong · Dallan Porter · Jeffery J. Puschell · John T. Rayner · J. Jedadiah Rembold · Katherine C. Roth · Richard J. Rudy · Ray W. Russell · Eileen V. Ryan · William H. Ryan · Tomohiko Sekiguchi · Yasuhito Sekine · Mark A. Skinner · Mitsuru Sôma · Andrew W. Stephens · Alex Storrs · Robert M. Suggs · Seiji Sugita · Eon-Chang Sung · Naruhisa Takatoh · Jill C. Tarter · Scott M. Taylor · Hiroshi Terada · Chadwick J. Trujillo · Vidhya Vaitheeswaran · Faith Vilas · Brian D. Walls · Jun-ihi Watanabe · William J. Welch · Charles E. Woodward · Hong-Suh Yim · Eliot F. Young Received: 9 October 2010 / Accepted: 8 February 2011 © The Author(s) 2011. -
A Comparative Analysis of the Geology Tools Used During the Apollo Lunar Program and Their Suitability for Future Missions to the Om on Lindsay Kathleen Anderson
University of North Dakota UND Scholarly Commons Theses and Dissertations Theses, Dissertations, and Senior Projects January 2016 A Comparative Analysis Of The Geology Tools Used During The Apollo Lunar Program And Their Suitability For Future Missions To The oM on Lindsay Kathleen Anderson Follow this and additional works at: https://commons.und.edu/theses Recommended Citation Anderson, Lindsay Kathleen, "A Comparative Analysis Of The Geology Tools Used During The Apollo Lunar Program And Their Suitability For Future Missions To The oonM " (2016). Theses and Dissertations. 1860. https://commons.und.edu/theses/1860 This Thesis is brought to you for free and open access by the Theses, Dissertations, and Senior Projects at UND Scholarly Commons. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of UND Scholarly Commons. For more information, please contact [email protected]. A COMPARATIVE ANALYSIS OF THE GEOLOGY TOOLS USED DURING THE APOLLO LUNAR PROGRAM AND THEIR SUITABILITY FOR FUTURE MISSIONS TO THE MOON by Lindsay Kathleen Anderson Bachelor of Science, University of North Dakota, 2009 A Thesis Submitted to the Graduate Faculty of the University of North Dakota in partial fulfillment of the requirements for the degree of Master of Science Grand Forks, North Dakota May 2016 Copyright 2016 Lindsay Anderson ii iii PERMISSION Title A Comparative Analysis of the Geology Tools Used During the Apollo Lunar Program and Their Suitability for Future Missions to the Moon Department Space Studies Degree Master of Science In presenting this thesis in partial fulfillment of the requirements for a graduate degree from the University of North Dakota, I agree that the library of this University shall make it freely available for inspection. -

Stereo Reconstruction from Apollo 15 and 16 Metric Camerazachary
42nd Lunar and Planetary Science Conference (2011) 2267.pdf Stereo Reconstruction from Apollo 15 and 16 Metric Camera Zachary Moratto1, Ara Nefian1,2, Taemin Kim1, Michael Broxton1,2, Ross Beyer1,3, and Terry Fong1, 1NASA Ames Research Center, MS 269-3, Moffett Field, CA, USA ([email protected]), 2Carnegie Mellon University, 3Carl Sagan Center SETI Introduction saic, DIM, and precision maps are produced for both This paper presents the production of digital terrain mod- missions separately. els (DTMs) and digital image mosaics (DIMs) of the Lu- The DTM mosaic is formed by a weighted average of nar surface that cover a large portion of the near-side of the stereo pair DTMs. Input DTMs were weighted max- the Moon at 40 m/px and 10 m/px respectively. These imum value at their centers and then feathered to zero at data products, produced under direction of the NASA the edges. The DTM mosaics are shown in Fig. 1 and 2. ESMD Lunar Mapping and Modeling Project (LMMP), The DIM was created by projecting the original res- are based on 2600 stereo image pairs from the Apollo olution images onto the 40 m/px DTMs, creating indi- 15 and 16 missions that were digitized at high resolution vidual orthoimages. Those orthoimages were then mo- from the original mission films [1]. Our reconstruction saicked by a process described in [5] without reflectance. was carried out using the highly automated Ames Stereo Therefore, only the final image mosaic and time expo- Pipeline software [2], which runs on NASA’s Pleiades sures were calculated. -
Waltham on the Moon, Apollo 15 and the Search for the Holy Grail
Waltham on the Moon, Apollo 15 and the Search for the Holy Grail. Post contains Pict... Page 1 of 3 [ View Thread ] [ Return to Index ] [ Read Prev Msg ] [ Read Next Msg ] 'Poor Man's' Watch Forum ARCHIVE Waltham on the Moon, Apollo 15 and the Search for the Holy Grail. Posted By: Kelly M. Rayburn <[email protected]> Date: Wednesday, 27 August 2003, at 2:21 a.m. (Reto was kind enough to ask me to repost my earlier post on the above topic for the archives on the new server. It contains nothing new except the post script. If you have already read the post, please disregard.) Hi all: In preparation for purchasing an Omega Speedmaster Professional, I have done the obligatory research on the use of the Speedmaster in the NASA space program. Chuck Maddox's excellent article on Omega's history with the Apollo program revealed some interesting facts that I did not know. In brief: The cal. 321 Speedmasters were purchased by NASA for the astronauts' use prior to the introduction of the cal. 861 movement in 1968. Apparently it is generally accepted that only the cal. 321 Speedmasters were worn on the moon during the various moon missions, as the initial procurement of these watches around 1965 was distributed to all astonauts at that time (two each) with as many as twenty still left in inventory and never used following the final Apollo 17 mission in 1972. Apparently, there is no evidence that a cal. 861 Speedmaster was worn by any of the moonwalkers or that NASA had procured any cal. -

Appendix a Apollo 15: “The Problem We Brought Back from the Moon”
Appendix A Apollo 15: “The Problem We Brought Back From the Moon” Postal Covers Carried on Apollo 151 Among the best known collectables from the Apollo Era are the covers flown onboard the Apollo 15 mission in 1971, mainly because of what the mission’s Lunar Module Pilot, Jim Irwin, called “the problem we brought back from the Moon.” [1] The crew of Apollo 15 carried out one of the most complete scientific explorations of the Moon and accomplished several firsts, including the first lunar roving vehicle that was operated on the Moon to extend the range of exploration. Some 81 kilograms (180 pounds) of lunar surface samples were returned for anal- ysis, and a battery of very productive lunar surface and orbital experiments were conducted, including the first EVA in deep space. [2] Yet the Apollo 15 crew are best remembered for carrying envelopes to the Moon, and the mission is remem- bered for the “great postal caper.” [3] As noted in Chapter 7, Apollo 15 was not the first mission to carry covers. Dozens were carried on each flight from Apollo 11 onwards (see Table 1 for the complete list) and, as Apollo 15 Commander Dave Scott recalled in his book, the whole business had probably been building since Mercury, through Gemini and into Apollo. [4] People had a fascination with objects that had been carried into space, and that became more and more popular – and valuable – as the programs progressed. Right from the start of the Mercury program, each astronaut had been allowed to carry a certain number of personal items onboard, with NASA’s permission, in 1 A first version of this material was issued as Apollo 15 Cover Scandal in Orbit No. -
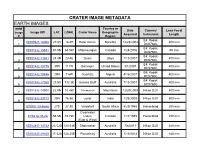
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual -

Apollo 15 Mission
THE APOLLO 15 MISSION On July 30, 1971, the Apollo 15 lunar module Falcon, descending over the 4,000 meter Apennine Mountain front, landed at one of the most geologically diverse sites selected in the Apollo program, the Hadley-Apennine region. Astronauts Dave Scott and Jim Irwin brought the spacecraft onto a mare plain just inside the most prominent mountain ring structure of the Imbrium basin, the Montes Apennines chain which marks its southeastern topographic rim, and close to the sinuous Hadley Rille (Fig. 1). The main objectives of the mission were to investigate and sample materials of the Apennine Front itself (expected to be Imbrium ejecta and pre-Imbrium materials), of Hadley Rille, and of the mare lavas of Palus Putredinis (Fig. 2). A package of seven surface experiments, including heat flow and passive seismic, was also set up and 1152 surface photographs were taken. A television camera, data acquisition (sequence) camera, and orbital photography and chemical data provided more information. The Apollo 15 mission was the first devoted almost entirely to science, and the first to use a Rover vehicle which considerably extended the length of the traverses, from a total of 3.5 km on Apollo 14 to 25.3 km during three separate traverses on Apollo 15 (Fig. 3). The collected sample mass was almost doubled, from 43 kg on Apollo 14 to 78 kg on Apollo 15. A reduction in the planned traverse length was made necessary, in part by unexpected and time-consuming difficulties in the collection of the deep core sample (at the experiments package area). -

15415 Ferroan Anorthosite 269.4 Grams “Don’T Lose Your Bag Now, Jim”
15415 Ferroan Anorthosite 269.4 grams “don’t lose your bag now, Jim” Figure 1: Photo of 15415 before processing. Cube is 1 inch. NASA# S71-44990 Transcript CDR Okay. Now let’s go down and get that unusual one. CDR Yes. We’ll get some of these. - - - No, let’s don’t mix Look at the little crater here, and the one that’s facing us. There is them – let’s make this a special one. I’ll zip it up. Make this bag this little white corner to the thing. What do you think the best 196, a special bag. Our first one. Don’t lose your bag now, Jim. way to sample it would be? O, boy. LMP I think probably – could we break off a piece of the clod underneath it? Or I guess you could probably lift that top fragment Transearth Coast Press Conference off. CC Q2: Near Spur Crater, you found what may be “Genesis CDR Yes. Let me try. Yes. Sure can. And it’s a white clast, Rock”, the oldest yet collected on the Moon. Tell us more about and it’s about – oh, boy! it. LMP Look at the – glint. Almost see twinning in there. CDR Well, I think the one you’re referring to was what we CDR Guess what we found? Guess what we just found? felt was almost entirely plagioclase or perhaps anorthosite. And it LMP I think we found what we came for. was a small fragment sitting on top of a dark brown larger fragment, CDR Crystal rock, huh? Yes, sir. -

Rine and the Apennine Mountains. INSTITUTION National Aeronautics and Space Administration, Washington, D.C
DOCUMENT RESUME ED 053 930 SE 012 016 AUTHOR Simmons, Gene TITLE On the Moon with Apollo 15,A Guidebook to Hadley Rine and the Apennine Mountains. INSTITUTION National Aeronautics and Space Administration, Washington, D.C. PUB DATE Jun 71 NOTE 52p. AVAILABLE FROM Superintendent of Documents, U.S. Government Printing Office, Washington, D.C. 20402 (3300-0384 $0.50) EDRS PRICE EDRS Price MF-$0.65 HC-$3.29 DESCRIPTORS *Aerospace Technology, Geology, Reading Materials, Resource Materials IDENTIFIERS *Lunar Studies, Moon ABSTRACT The booklet, published before the Apollo 15 mission, gives a timeline for the mission; describes and illustrates the physiography of the landing site; and describes and illustrates each lunar surface scientific experiment. Separate timelines are included for all traverses (the traverses are the Moon walks and, for Apollo 15, the Moon rides in the Rover) with descriptions of activities at each traverse stop. Each member of the crew and the backup crew is identified. Also included is a bibliography of lunar literature and glossary of terms used in lunar studies. Photographs and diagrams are utilized throughout. Content is descriptive and informative but with a minimum of technical detail. (Author/PR) , ON THE MOON WITH APOLLO 15 A Guidebook to Hadley Rille and the Apennine Mountains U.S. DEPARTMENT OFHEALTH, EDUCATION,& WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS SEENREPRO- DUCED EXACTLY AS RECEIVEDFROM THE PERSON OR ORGANIZATIONORIG INATING IT. POINTS OF VIEWOR OPIN IONS STATED DO NOTNECESSARILY REPRESENT OFFICIAL OFFICEOF EDU CATION POSITION OR POLICY isr) 1..r1 w fl R CO iiii0OP" O NATIONAL AERONAUTICS AND SPACE ADMINISTRATION June 1971 1 \n ON THE MOON WITH APOLLO 15 A uidebook to Hadley Rille and the Apennine Mountains by Gene Simmons Chief Scientist Manned Spacecraft Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION June 1971 2 For sale by the Superintendent of Documents, U.S. -
Science Training History of the Apollo Astronauts William C
NASA/SP-2015-626 Science Training History of the Apollo Astronauts William C. Phinney National Aeronautics and Space Administration Apollo 17 crewmembers Gene Cernan and Harrison Schmitt conducting a practice EVA in the southern Nevada Volcanic Field near Tonopah, NV (NASA Photograph AS17-S72-48930). ii NASA/SP-2015-626 Science Training History of the Apollo Astronauts William C. Phinney National Aeronautics and Space Administration Cover photographs: From top: Apollo 13 Commander (CDR) James Lovell, left, and Lunar Module Pilot (LMP) Fred Haise during a geologic training trip to Kilbourne Hole, NM, November 1969 (NASA Photography S69- 25199); (Center) Apollo 16 LMP Charles Duke (left) and CDR John W. Young (right) during a practice EVA at Sudbury Crater, Ontario, Canada, July 1971 (NASA Photograph AS16-S71-39840); Apollo 17 LMP Harrison Schmitt (left) and CDR Eugene Cernan (right) during a practive EVA at Lunar Crater Volcanic Field, Tonopah, Nevada, September 1972 (NASA Photograph AS17-S72-48895); Apollo 15 CDR David Scott (left) and James Irwin (right) during practice geologic EVA training at the Rio Grande Gorge, Taos, NM, March 1971 (NASA Photograph AS15-S71-23773) iv ACKNOWLEDGEMENTS When I retired from NASA several of my coworkers, particularly Dave McKay and Everett Gibson, suggested that, given my past role as the coordinator for the science training of the Apollo astronauts, I should put together a history of what was involved in that training. Because it had been nearly twenty-five years since the end of Apollo they pointed out that many of the persons involved in that training might not be around when advice might be sought for future missions of this type. -

The Lunar Crater Observation and Sensing Satellite (LCROSS) Payload Development and Performance in Flight
Space Sci Rev (2012) 167:23–69 DOI 10.1007/s11214-011-9753-4 The Lunar Crater Observation and Sensing Satellite (LCROSS) Payload Development and Performance in Flight Kimberly Ennico · Mark Shirley · Anthony Colaprete · Leonid Osetinsky Received: 8 October 2010 / Accepted: 25 January 2011 / Published online: 19 February 2011 © US Government 2011 Abstract The primary objective of the Lunar Crater Observation and Sensing Satellite (LCROSS) was to confirm the presence or absence of water ice in a permanently shad- owed region (PSR) at a lunar pole. LCROSS was classified as a NASA Class D mission. Its payload, the subject of this article, was designed, built, tested and operated to support a condensed schedule, risk tolerant mission approach, a new paradigm for NASA science missions. All nine science instruments, most of them ruggedized commercial-off-the-shelf (COTS), successfully collected data during all in-flight calibration campaigns, and most im- portantly, during the final descent to the lunar surface on October 9, 2009, after 112 days in space. LCROSS demonstrated that COTS instruments and designs with simple interfaces, can provide high-quality science at low-cost and in short development time frames. Building upfront into the payload design, flexibility, redundancy where possible even with the science measurement approach, and large margins, played important roles for this new type of pay- load. The environmental and calibration approach adopted by the LCROSS team, compared to existing standard programs, is discussed. The description, capabilities, calibration and in- flight performance of each instrument are summarized. Finally, this paper goes into depth about specific areas where the instruments worked differently than expected and how the flexibility of the payload team, the knowledge of instrument priority and science trades, and proactive margin maintenance, led to a successful science measurement by the LCROSS payload’s instrument complement. -

Moon Landings - Luna 9
Age Research cards 7-11 years Moon landings - Luna 9 About Credit-Pline On the 3 February 1966, Luna 9 made history by being the first crewless space mission to make a soft landing on the surface of the Moon. It was the ninth mission in the Soviet Union’s Luna programme (the previous five missions had all experienced spacecraft failure). The Soviet Union existed from 1922 to 1991 and was the largest country in the world; it was made up of 15 states, the largest of which was the Russian Republic, now called Russia. The Space Race is a term that is used to describe the competition between the United States of America and the Soviet Union which lasted from 1955 to 1969, as both countries aimed to be the first to get humans to the Moon. Working scientifically The Luna 9 spacecraft had a mass of 98kg (about outwards to make sure the spacecraft was stable the same as a baby elephant) and it carried before it began its scientific exploration. communication equipment to send information back to Earth, a clock, a heating system, a power The camera on board took many photographs of source and a television system. The spacecraft the lunar surface including some panoramic included scientific equipment for two enquiries: images. These images were transmitted back to one to find out what the lunar surface was like; Earth using radio waves. Although the Soviet and another to find out how much dangerous Union didn’t release these photographs to the rest radiation there was on the lunar surface.