Semiactive Control Strategies for a Fully Suspended Bicycle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2011 Cadillac STS Warranty Guide
Cadillac Limited Warranty and Owner Assistance Information - 2011 Black plate (1,1) IMPORTANT: This booklet contains important information about the vehicle's warranty coverage. It also explains owner assistance information and GM's participation in an Alternative Dispute Resolution Program. Keep this booklet with your vehicle and make it available to a Cadillac dealer if warranty work is needed. Be sure to keep it with your vehicle if you sell it so future owners will have the information. Owner's Name: Street Address: City & State: Vehicle Identification Number (VIN): Date Vehicle First Delivered or Put In Use: Odometer Reading on Date Vehicle First Delivered or Put In Use: Cadillac Limited Warranty and Owner Assistance Information - 2011 Black plate (2,1) Have you purchased the Genuine GM Protection Plan? The GM Protection Plan may be purchased within specific time/mileage limitations. Remember, if the service contract you are considering for purchase does not have the GM Protection Plan emblem shown above on it, then it is not the Genuine GM Protection Plan from GM. © 2010 Cadillac Motor Car Division, General Motors. All rights reserved. Printed in the U.S.A. GENERAL MOTORS, GM, CADILLAC, and the CADILLAC emblem are registered trademarks of General Motors LLC. Part No. 25966010 A First Printing Cadillac Limited Warranty and Owner Assistance Information - 2011 Black plate (3,1) 2011 Cadillac Limited Warranty and Owner Assistance Information Important Message to Cadillac Escalade Hybrid Vehicle Operation and Care . 18 Owners... .......................1 Warranty . 14 Maintenance and Warranty GM's Commitment . 1 What is Covered . 15 Service Records . 18 Owner Assistance . -

Global Monthly Is Property of John Doe Total Toyota Brand
A publication from April 2012 Volume 01 | Issue 02 global europe.autonews.com/globalmonthly monthly Your source for everything automotive. China beckons an industry answers— How foreign brands are shifting strategies to cash in on the world’s biggest auto market © 2012 Crain Communications Inc. All rights reserved. March 2012 A publication from Defeatglobal spurs monthly dAtA Toyota’s global Volume 01 | Issue 01 design boss Will Zoe spark WESTERN EUROPE SALES BY MODEL, 9 MONTHSRenault-Nissan’sbrought to you courtesy of EV push? www.jato.com February 9 months 9 months Unit Percent 9 months 9 months Unit Percent 2011 2010 change change 2011 2010 change change European sales Scenic/Grand Scenic ......... 116,475 137,093 –20,618 –15% A1 ................................. 73,394 6,307 +67,087 – Espace/Grand Espace ...... 12,656 12,340 +316 3% A3/S3/RS3 ..................... 107,684 135,284 –27,600 –20% data from JATO Koleos ........................... 11,474 9,386 +2,088 22% A4/S4/RS4 ..................... 120,301 133,366 –13,065 –10% Kangoo ......................... 24,693 27,159 –2,466 –9% A6/S6/RS6/Allroad ......... 56,012 51,950 +4,062 8% Trafic ............................. 8,142 7,057 +1,085 15% A7 ................................. 14,475 220 +14,255 – Other ............................ 592 1,075 –483 –45% A8/S8 ............................ 6,985 5,549 +1,436 26% Total Renault brand ........ 747,129 832,216 –85,087 –10% TT .................................. 14,401 13,435 +966 7% RENAULT ........................ 898,644 994,894 –96,250 –10% A5/S5/RS5 ..................... 54,387 59,925 –5,538 –9% RENAULT-NISSAN ............ 1,239,749 1,288,257 –48,508 –4% R8 ................................ -
GM Is Playing a Proactive and Expansive Role in Reducing the Impact of the Automobile on Our Environment
GM is playing a proactive and expansive role in reducing the impact of the automobile on our environment Our Products General Motors 2004/05 Corporate Responsibility Report Our Products Overview General Motors is committed to providing its customers with compelling products – products that reflect strong design themes, emphasize safety and quality, offer Key Issues fuel efficiency and low emissions, and meet customers' demands for performance Highlights and utility. Every day, GM employees strive for new and innovative ways to • Leading quality improve the vehicles the company builds and sells. performance >> • 350 Hybrid buses now in use >> What’s in the Chapter? • Continuous safety - GM's Vehicle Strategy Responsible Vehicle Use before, during and after GM's "gotta have" product strategy involves GM encourages drivers to use a crash >> delivering continuous improvement in Design, their vehicles responsibly, • GM's Fuel Economy/GHG Quality, Safety, Emissions, Fuel Economy, and both to reduce environmental emissions calculator >> Vehicle Recycling. impact and to increase the safety of vehicle occupants, Challenges Advanced Engines pedestrians and other road • Reducing vehicle New technologies such as Displacement on users. emissions >> Demand and Twin Port are the latest steps to • Expanding the range of enhancing engine efficiency. GM's latest Vehicle Design Hybrid vehicles we sell >> generation of cleaner diesel engines includes the GM's life-cycle thinking world's first diesel to meet the latest Euro 4 approach and initiatives such emission standards. GM also is introducing more as the Oil-Life System or lifecycle analysis (LCA) vehicles that can run on alternative fuels such as studies have helped GM make informed ethanol, LPG and CNG. -

Performance Improvement of Automotive Suspension Systems Using Inerters and an Adaptive Controller
Performance Improvement of Automotive Suspension Systems using Inerters and an Adaptive Controller by Ankur Agrawal A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Applied Science in Mechanical Engineering Waterloo, Ontario, Canada, 2013 c Ankur Agrawal 2013 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract The possible benefits of employing inerters in automotive suspensions are explored for passenger comfort and handling. Different suspension strut designs in terms of the relative arrangement of springs, dampers and inerters have been considered and their performance compared with that of a conventional system. An alternate method of electrically realizing complex mechanical circuits by using a linear motor (or a rotary motor with an appropriate mechanism) and a shunt circuit is then proposed and evaluated for performance. However, the performance improvement is shown from simulations to be significant only for very stiff suspensions, unlike those in passenger vehicles. Hence, the concept is not taken up for prototyping. Variable damping can be implemented in suspension systems in various ways, for exam- ple, using magneto-rheological (MR) fluids, proportional valves, or variable shunt resistance with a linear electromagnetic motor. Hence for a generic variable damping system, a control algorithm is developed which can provide more comfort and better handling simultaneously compared to a passive system. After establishing through simulations that the proposed adaptive control algorithm can demonstrate a performance better than some controllers in prior-art, it is implemented on an actual vehicle (Cadillac STS) which is equipped with MR dampers and several sensors. -
V8.1 Supported Vehicle List
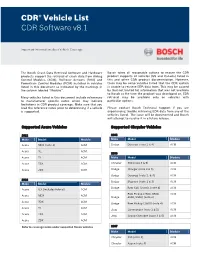
® CDR Vehicle List CDR Software v8.1 Important Information about Vehicle Coverage The Bosch Crash Data Retrieval Software and Hardware Bosch takes all reasonable actions to ensure the CDR products support the retrieval of crash data from Airbag product supports all vehicles (US and Canada) listed in Control Modules (ACM), Roll-over Sensors (ROS) and this and other CDR product documentation. However, Powertrain Control Modules (PCM) installed in vehicles there may be some vehicles listed that the CDR system listed in this document as indicated by the markings in is unable to retrieve EDR data from. This may be caused the column labeled ‘‘Module’’. by (but not limited to) information that was not available to Bosch at the time the product was developed or, EDR Many vehicles listed in this document include references retrieval may be available only on vehicles with to manufacturer specific notes which may indicate particular options. limitations in CDR product coverage. Make sure that you read the reference notes prior to determining if a vehicle Please contact Bosch Technical Support if you are is supported. experiencing trouble retrieving EDR data from any of the vehicles listed. The issue will be documented and Bosch will attempt to resolve it in a future release. Supported Acura Vehicles Supported Chrysler Vehicles 2012 2005 Make Model Module Make Model Module Acura MDX (note 1) ACM Dodge Durango (note 2 & 4) ACM Acura RL ACM 2006 Acura TL ACM Make Model Module Acura TSX ACM Chrysler 300 (note 3 & 5) ACM Acura ZDX ACM Dodge Charger (note -

PDF of the 2005 Cadillac STS Ordering Guide
2005 Cadillac STS STANDARD EQUIPMENT S = Standard Equipment A = Available -- (dashes) = Not Available D = ADI Available = Included in Equipment Group = Included in Equipment Group but upgradeable Codes listed in the shaded column titled Ref. Only RPO Code are for internal use only and should not be ordered. Free Ref. STS (V6) RWD/AWD 6DW29 STS (V8) RWD/AWD 6DC29 Flow Only Description RPO RPO 1SA 1SB 1SC 1SD 1SE 1SF 1SG Code Code AY0 Air bags, frontal dual-stage and side-thorax S1 S1 S1 S1 S1 S1 S1 for driver and front passenger, head curtain for front and outboard rear passengers 1 - Head curtain air bags are designed to help reduce the risk of head and neck injuries to front and rear seat occupants on the near side of certain side-impact collisions. Always use safety belts and proper child restraints, even in vehicles equipped with air bags. Children are safer when properly secured in a rear seat, See the Owner's Manual for more safety information. K14 Air filtration system, outside recirculating air -- S S -- S S S filter Aluminum Trim Package, premium S S -- S -- -- -- aluminum trim, includes center stack, console and IP spear molding Armrest, center, front S S S S S S S Armrest, center, rear, includes dual S S S S S S S cupholders Climate Control, dual-zone, includes S S S S S S S individual climate settings for driver and right front passenger Console, floor, includes floor shifter, integral S S S S S S S armrest, storage compartment, cupholders and (2) auxiliary power outlets Cruise control, electronic with set and S S S S S S S -
Canadian Upgrade Program Overview Canadian Wireless Service Providers Plan to Decommission Their 2G Code Division Multiple Access (CDMA) Network Through 2015
Bulletin No.: 15-08-44-001C Date: Jun-2015 Subject: GM of Canada OnStar® Cellular Communication Upgrade Models: 2000-2014 GM Passenger Cars and Light Duty Trucks 2015 Buick Enclave 2015 Cadillac Escalade Models (Built W/O VV4) 2015 Chevrolet Camaro, Express, Traverse 2015 Chevrolet Silverado 2500/3500, Suburban, Tahoe (Built W/O VV4) 2015 GMC Acadia, Savana 2015 GMC Sierra 2500/3500, Yukon Models (Built W/O VV4) Equipped with OnStar® (RPO UE1) Attention: This Bulletin does not apply to vehicles equipped with RPO UE0. This Bulletin has been revised to update the miscellaneous product ordering information, Labor Time Information, Parts Information, both instructions under the Replacement Instructions and to add OnStar® Module Bracket Modification section at the end of the bulletin. Please discard Corporate Bulletin Number 15-08-44-001B. Canadian Upgrade Program Overview Canadian wireless service providers plan to decommission their 2G Code Division Multiple Access (CDMA) network through 2015. OnStar® currently depends on active and functioning 2G CDMA networks to deliver services. As a result, in order to continue to provide OnStar® services without interruption, Canadian vehicles that do not have OnStar® 3G/4G LTE will need a hardware upgrade. In order to upgrade their vehicle hardware and continue receiving OnStar® services, a customer will receive a letter from OnStar® with instructions for the upgrade process when the hardware is available for installation on their vehicle. There are different versions of hardware required for vehicles that will be available at different times in early 2015, so it is important that customers first receive the communication from OnStar® to begin the upgrade process. -
2009 Cadillac STS/STS-V Navigation System M
2009 Cadillac STS/STS-V Navigation System M Overview ........................................................ 1-1 Voice Recognition ........................................... 4-1 Overview .................................................. 1-2 Voice Recognition ...................................... 4-2 Features and Controls ..................................... 2-1 Vehicle Customization ..................................... 5-1 Features and Controls ................................ 2-2 Vehicle Customization ................................. 5-2 Navigation Audio System ................................ 3-1 Phone ............................................................ 6-1 Navigation Audio System ............................ 3-2 Phone ...................................................... 6-2 Index .................................................................1 ® ® GENERAL MOTORS, GM, the GM Emblem, CADILLAC, Dolby is manufactured under license from Dolby Laboratories. Dolby® and the double-D symbol the CADILLAC Crest & Wreath, and the name STS ® are registered trademarks of General Motors are trademarks of Dolby Laboratories. Corporation. The information in this manual supplements the owner manual. This manual includes the latest information DTS and DTS Digital available at the time it was printed. We reserve the right Surround are registered to make changes in the product after that time without trademarks of Digital notice. For vehicles first sold in Canada, substitute Theater Systems, Inc. the name General Motors of Canada Limited -

Download but Meet the Buick Terraza
MOTOR page- 11/8/04 3:26 PM Page 1 Chevy Corvette 20 November 2004 MOTOR page- 11/8/04 3:27 PM Page 2 CARS ARE BACK! Tech Preview of the 2005 Domestics BY PAUL WEISSLER Chrysler 300 After a multiyear infatuation with SUVs, the domestic automakers have ‘rediscovered’ the automobile. Our annual report covers several all-new models that have resulted from this new marketing direction. ord is calling 2005 the Year of the Car, and is introduc- ing brand-new cars and carlike “crossover” vehicles. But Fit’s not alone, as General Motors and the Chrysler Group also are focusing on the passenger car for 2005. At Ford, the new Mustang gets the most head-turning looks, of course, but the new Ford 500 and Mercury Montego sedans, and the Freestyle “almost SUV,” are a higher volume group. At Chrysler, the in-your-face 300 and Dodge Magnum wagon are getting plenty of attention. And GM has several significant new Dodge Magnum cars—the compact Chevrolet Cobalt (which replaces the Cava- lier), Pontiac G6 (replacing the Grand Am), Buick LaCrosse (replacing the Regal and Century), Cadillac STS (replacing the Seville) and the Corvette, which is irreplaceable. Let’s delve further into it and see what the three domestic camps are offering for 2005. Ford The Ford 500 and its sister Mercury Montego clearly are cars, but what’s the Freestyle? The North American Car of the Year jury placed it in the truck/SUV category (it has suspension modifications to increase ride height and a wagon-type body with three-row seating), but it’s technically very close to the 500. -

Magnesium: Where Have We Been, Where Are We Going?
0DJQHVLXP:KHUH+DYH:H%HHQ:KHUH$UH:H*RLQJ" $<HDU5HWURVSHFWLYHRQWKH8VHRI0DJQHVLXP %\-RVHSK&%HQHG\N(GLWRU/LJKW0HWDO$JH 6WhigVXi [dgbVi^dc VWdji i]Z VYkVciV\Zdjh egdeZgi^Zh d[ bV\" cZh^jbVcY^ihVaadnh# ^cXZ^ihÃghiejWa^XVi^dc^cBVn&.)(!A^\]iBZiVa >c hjbbVg^o^c\ YZXVYZh d[ bV\cZh^jb egd\gZhh! 6\ZbV\Vo^cZ]VhWZZcXdaaVi^c\i]Zegd\gZhhVcY ^cXajY^c\ i]Z ¸jeh VcY Ydlch!¹ i]Z fjZhi^dch id WZ i]Z ZXdcdb^X jeh"VcY"Ydlch d[ bV\cZh^jb! i]Z VchlZgZY·l]ZgZ]VkZlZWZZc!l]ZgZVgZlZ\d^c\4· a^\]iZhid[i]ZXdbbdY^ina^\]ibZiVah#HiVgi^c\l^i] VgZeZg]VehWZhiVchlZgZYWnhiVgi^c\l^i]i]ZegZhZci! Hi]ZÃghi^hhjZd[A^\]iBZiVa6\Z!^ih[djcYZg!Gdn;Zaadb?g# ^#Z#!l]ZgZVgZlZcdl4 lgdiZVWdjii]ZbV\cZh^jbegdYjXi^dcegdXZhhZhd[i]Z i^bZh bjX] i]Z hVbZ idYVn# I]^h Vgi^XaZ hjbbVg^oZh BV\cZh^jb/L]ZgZ6gZLZCdl4 i]Z egd\gZhh bVYZ ^c bV\cZh^jb iZX]cdad\n i]gdj\] i]Z YZXVYZh! l^i] Zbe]Vh^h dc i]Z jhZ d[ bV\cZh^jb# 9ZhXg^W^c\ i]Z egZhZci h^ijVi^dc ^c i]Z ldgaY d[ I]Z nZVg &.)( lVh V lViZgh]ZY nZVg [dg bV\cZh^jb bV\cZh^jb! ^i ^h Vei id eVgVe]gVhZ 8]VgaZh 9^X`Zch ^c egdYjXi^dc!l^i]ldgaYl^YZegdYjXi^dceZV`^c\i]VinZVg XVeijg^c\i]ZZhhZcXZd[VcZck^gdcbZci^ci]Zb^Yhid[ YjZidi]ZlVgZ[[dgiVcYi]Zc[Vaa^c\egZX^e^idjhanVii]Z ijgbd^aVcYX]Vc\Z/ ZcYd[LL>>WnV[VXidgd[*%i^bZh#>iidd`YZXVYZh[dg I]ZhZVgZi]ZWZhid[i^bZh0i]ZhZVgZi]Zldghid[i^bZh# i]Z bVg`Zi id gZXdkZg id l]ZgZ ^i ^h idYVn·hdbZ [djg I]Zedh^i^kZh^YZd[i]ZegZhZcibV\cZh^jbhXZcVg^d i^bZhi]ZldgaYl^YZegdYjXi^dcaZkZaYjg^c\^iheZV`^c ]VhbVcn[VXZih!bVcnd[l]^X]VgZbVYZVeeVgZciVii]Z LL>>·l^i]XgZY^iYjZ^caVg\ZeVgiidi]ZgZbVg`VWaZ +*i]6ccjVaLdgaYBV\cZh^jb8dc[ZgZcXZ0i]ZcZ\Vi^kZ egdeZgi^Zh -

Inspect and Correct Camshaft Position Sensor-Bank 1 Exhaust Or Cams…
9/1/2019 #PI0090E: Intermittent Engine Hesitation or Flutter Without DTC (Inspect and Correct Camshaft Position Sensor-Bank 1 Exhaust or Cams… Report a problem with this article Intermittent Engine Hesitation or Flutter Without DTC (Inspect and Correct Camshaft Position Sensor - Bank 1 Exhaust or Camshaft Position Sensor - Bank 1 Intake Harness Connector Terminals Subject: for Intermittent Conditions and Poor Connections) 2004-2006 Buick Rendezvous 2008-2012 Buick Enclave 2010-2012 Buick LaCrosse 2004-2012 Cadillac CTS, SRX 2006-2012 Cadillac STS 2008-2012 Chevrolet Equinox 2009-2012 Chevrolet Malibu, Traverse 2010-2012 Chevrolet Camaro Models: 2012 Chevrolet Captiva Sport, Caprice PPV, Impala 2007-2012 GMC Acadia 2010-2012 GMC Terrain 2007-2009 Pontiac G6 2008-2009 Pontiac G8, Torrent 2007-2010 Saturn OUTLOOK 2008-2009 Saturn AURA 2008-2010 Saturn VUE Equipped with 6 Cylinder Engine RPO LAU, LF1, LFW, LFX, LLT, LP1 or LY7 This PI is being revised to add the engine RPO LFX, the 2004-2006 Buick Rendezvous, the 2012 Chevrolet Caprice PPV, Captiva Sport and Impala to the Application Table, and update the Application Table and Warranty Information. Please discard PI0090D. The following diagnosis might be helpful if the vehicle exhibits the symptoms described in this PI. Condition/Concern Some customers may comment on an intermittent engine hesitation or flutter. This condition may be caused by intermittent conditions and poor connections at the terminals in the harness connector for the Camshaft Position Sensor - Bank 1 Exhaust or Camshaft -

Thomas J. Murphy, III V. 24 Street Cadillac
Thomas J. Murphy, III v. 24th Street Cadillac Corporation t/a Chesapeake Cadillac Jaguar et al. - No. 95, 1998 Term MOTOR VEHICLE LEASING ACT, Maryland Code (1990 Repl. Vol., 1998 Supp), Commercial Law Article, § 14-2001 et seq., incorporating the AUTOMOTIVE WARRANTY ENFORCEMENT ACT, Md. Code (1990 Repl. Vol., 1998 Supp.), Commercial Law Art., § 14-501 et seq. — Reasonable number of repair attempts is an issue for the trier of fact. Circuit Court for Baltimore County Case # 03-C-96-006783 CN IN THE COURT OF APPEALS OF MARYLAND No. 95 September Term, 1998 ________________________________________ THOMAS J. MURPHY, III v. 24th STREET CADILLAC CORPORATION t/a CHESAPEAKE CADILLAC JAGUAR et al. ________________________________________ Bell, C. J. Eldridge Rodowsky Chasanow Raker Wilner Cathell JJ. _______________________________________ Opinion by Chasanow, J. ________________________________________ Filed: April 15, 1999 This case requires that we address the construction of the remedial provisions of Maryland’s Consumer Motor Vehicle Leasing Contracts Act (the Act) for the first time since it was enacted in 1987. Maryland Code (1990 Repl. Vol., 1998 Supp.), Commercial Law Article, § 14-2001 et seq.1 The Act extends the warranty provisions of Maryland’s Automotive Warranty Enforcement Act, § 14-501 et seq., better known as the “lemon law,” to automobile leasing arrangements. The petition arises out of an action filed under the Act by Mr. Thomas J. Murphy, III (Mr. Murphy) against 24th Street Cadillac Corporation, t/a Chesapeake Cadillac Jaguar (Chesapeake) and General Motors (GM). Mr. Murphy seeks to invoke the Act’s remedial provision requiring a manufacturer to accept return of a leased vehicle and refund monies related to the lease agreement.