Moderate-Cost Approaches for Hydrodynamic Testing of High Performance Sailing Vessels
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Seite 1 Von 7 VELUM Ng
VELUM ng - Wettfahrt Seite 1 von 7 Deutsch- Schweizerischer Motorboot-Club e.V. XL. Regatta der Eisernen 2015 L31304457 Deutsch- Schweizerischer Motorboot-Club e.V. vorläufige Ergebnisliste 1. Wettfahrt 28. November 2015 Low-Point Wettfahrtleitung: Matthias Hagner & Jörn Thamm Schiedsgericht: Christoph Zeiser Auswertung: Juan Gruber 29.11.2015 - 12:30:20 Gruppe: (1,0) Sportboote (Yardstick) 1.Wf / Startzeit: 28.11.2015 12:05:00 PL. NAT SEGELNR BOOTSNAME STEUERMANN/-FRAU BOOTSTYP CLUB GES.ZEIT BER.ZEIT 1 SUI 8 Mojo Ueli Naef KielJollenKreuzer SSCRo 00:49:34 00:55:42 2 GER 326 bloodhound Schwarz, Jo Melges 24 YCL 00:50:21 00:55:57 3 SUI 27 Sailbox Lukas Ziltener mOcean 26 SCST 00:48:24 00:56:17 4 GER 832 Corvus Begher Thomas Longtze YLB 00:48:00 00:56:28 5 GER 594 Sayonara light Jäger, Sascha Melges 24 YCF 00:51:53 00:57:39 6 SUI 809 Li Corbelli, Ruedi Longtze SCE 00:51:52 01:01:01 7 GER 461 Gamberro Felix Ertel Platu 25 SMCF 00:58:29 01:02:53 8 GER 820 TiPunsh Graf Elmar First Class 8 SCMB 01:00:24 01:03:35 9 GER 824 Wetfeet Kaller Eckhard Longtze YCM 00:55:01 01:04:44 10 GER 910 Sternschnuppe Nagel, Alexander First Class 8 NhSV 01:03:40 01:07:01 11 SUI 121 Tumachi Kuhn Marcel Beneteau 25 OD, Platu SVK 01:04:30 01:09:21 12 SUI 5 Cinque Blu Ruoff Severin Blu26 01:02:28 01:10:59 13 SUI 8 Schori Martin mOcean 26 SCWE 01:03:33 01:13:54 14 SUI 16 Ancora Blu Jeanneret Lionel Blu26 01:13:37 01:23:39 15 (DNC) SUI 909 Trybguet Gigli Max First Class 8 ASC DNC Statistik: gemeldet: 15, gestartet: 14, gewertet: 14 Gruppe: (1,0) Auslegerboote (Yardstick) 1.Wf / Startzeit: 28.11.2015 12:05:00 PL. -

Binnen-Yardstick Tiefwasser 2008
Österreichischer Segel-Verband Binnen-Yardstick Tiefwasser 2008 Die Zusatzbuchstaben nach der Bootstype bedeutet: HBK Hubkiel KMK Kimmkiel KLS Kielschwerter KUK Kurzkiel MTK Mittelkiel SCH Schwert SWK Schwenkkiel 11 metre One Design 86 14-Foot-Dinghi 93 18-Foot-Skiff 74 29er 100 49er 78 808er 100 8m One Design HBK 7/8 Spi 91 8m One Design HBK Topspi 89 A A-Cat 76 AS 21 -> K21 Achat-Jolle 121 Achilles 24 110 Akros (12m Mast) 90 Akros (bis 13m) 84 Akros (bis 14m) 83 Akros (gr. 14m) 82 Albin Express 102 Albin Viggen 115 Alp Sail Putiferio V 97 Alpa 22 117 Alpa 515 113 Alpa 550 124 Anderson 22 120 Aquila Kiel 113 Aquila Schwert 110 Argo 680 N 99 Asso 99 (Standard) 83 Assunta (Krainer) 96 Atalanta 616 110 B BB 11 122 BB 17 119 Balaton 21 MTK 112 Balaton 24 MTK 112 Balaton 25 MTK 113 Ballad 107 Bandholm 24 117 Banner 1/2 tonner 99 Banner 23 Racer MTK 93 Banner 28 Racer 100 Bavaria 29 Speed N 101 Bavaria 30/300 111 Bavaria 32 106 Bavaria 34 96 Bavaria 606 MTK 116 Bavaria 707 HBK 116 Bavaria 707 MTK 113 Bavaria 760 MTK 113 Bavaria 770 HBK 113 Bavaria 770 MTK 112 Bavaria 808 115 Bavaria 820 MTK 111 Bénéteau 25 siehe Platu 25 Blue Sail 24 N 94 Bianca 27 115 Bianca 28 111 Bianca 36 101 Big Gipsy 11,9m² 122 Big Gipsy 14m² 120 Biga 24 MTK 114 Binnenkieler 30m² V 100 Bolero 122 Bongo Kielskiff N 97 Brenta 24 Blue Sail 24 N 94 Brenta 30 N 87 Brio 23 115 C C&C 25 111 C&C 26 110 C&C 27 108 C&C 30 107 C&C 33 102 C&C 34 102 C&C 35 91 CBS 750 MTK 114 CR 25 Cruiser 97 Cadet (Jugendboot) 152 Calif 120 Caprise 113 Carina MTK + KLS 134 Carrera Formula Uno 85 Carrera Helmsman 91 Catalina22->Jaguar22 Challenger 22 SWK 124 Chaps 30 V 88 Chess N 106 Comet(ino) 700 MTK Normal 118 Comet(ino) 701 MTK 112 Comet(ino) 770 MTK 114 Comet(ino) 800 MTK 113 Comet(ino) 801 MTK 112 Comet(ino) 860 108 Commander 31 109 Condor 55 HBK 121 Condor 70 HBK 114 Conger 118 Conrad 20 123 Conrad 600 MTK 119 Conrad 760 GT 117 Contender 103 Contest 25 119 Contest 27 114 Contest 28 113 Contest 30 109 Corsair F31 Tri 92 Corsaire 123 D Daimio 116 Dart 18 84 Defender 27 111 Dehler 18 111 Dehler 22 MTK 112 Dehler 25 Cr. -

Österreichischer Segel Verband Yardstickliste Tiefwasser 2021
Österreichischer Segel Verband Yardstickliste Tiefwasser 2021 Stand: 26.4.2021 Diese Yardstickzahlen gelten bei allen Regatten in Österreich ausgenommen Neusiedlersee und Bodensee! Bootsklasse YS-Zahl 20-21 L. Änderung Kommentar # -- 11m one Design 86 - 2016 Spi: 76m² 12m OD 82 - - 14-Foot-Dinghi 93 - - 15m² Jollenkreuzer Oldie (Vollholz) 105 - 2014 15m² Jollenkreuzer Peiso Sport 109 - - 15m² Jollenkreuzer Regatta ab Bj. 91 100 - - 15m² Jollenkreuzer Regatta bis Bj. 90 102 - - 15m² Jollenkreuzer Touren 104 - - 16m² Jollenkreuzer Regatta 104 -1 2021 16m² Jollenkreuzer Touren 111 - - 18-Foot-Skiff 74 - - 2.4 mR 125 - 2017 20m² Jollenkreuzer 110 - - 20m² Jollenkreuzer Cerpes 102 - 2016 20m² Jollenkreuzer Gaffel 111 - - 20m² Jollenkreuzer Oldie (Vollholz) 103 - 2018 20m² Jollenkreuzer Prokes/Rumpf 103 - 2021 Prokes und Rumpf gleichgestellt 20m² Jollenkreuzer Regatta ab Bj. 93 94 +1 2021 20m² Jollenkreuzer Regatta bis Bj. 92 96 - - 20m² Jollenkreuzer Staempfli 104 - - 29er 100 - - 30m² Binnenkieler 100 - - 30m² Jollenkreuzer 98 - - 420er 114 - - 470er 104 - - 49er 78 - - 505er 96 - - 808er 100 - - 8m OD (klassenkonform) 92 - - 8m OD Topspi 90 - - A Achat-Jolle 121 - - Achilles 24 110 - - Akros (bis 12m Mast) 90 - - Akros (bis 13m Mast) 84 - - Akros (bis 14m Mast) 83 - - Akros (über 14m Mast) 82 - - Albin Alpha 29 104 - 2019 Albin Express 102 - - Albin Viggen 115 - - Alp Sail Putiferio 97 - - Alpa 22 117 - - Alpa 515 113 - - Alpa 550 124 - - Alpha 29 114 - 2014 Anderson 22 120 - - Antila 26 CC 116 - 2020 Aphodite 101 96 - - Aquila Kiel 113 -

MSCA Annual Survey 2019
2020 MSCA Annual Survey Report International Musto Skiff Class Association ABOUT THE MUSTO SKIFF CLASS The Musto Skiff Class Association (MSCA) The Musto Skiff is a high-performance single-handed trapeze dinghy that is great fun to sail with a large community of sailors representing over 28 countries. The Musto Skiff Class Association (MSCA) is run by the members for the members. As a World Sailing International Class, the MSCA hosts annual World Championships in addition to supporting local class associations who host National Regattas, Open Meetings and training events throughout the year. The class benefits from long-term partnerships with international sponsors and partners including Musto, Ovington Boats Ltd, Harken, Hyde Sails, Selden Masts, and ACO Ltd. www.mustoskiff.com Photo credit: Bernardi Bibiloni Bigas, 2017 (www.bernardibibiloni.com) ABOUT THIS SURVEY The Survey Purpose The 2020 MSCA Annual Survey is created by the Musto Skiff Class Association (MSCA) International Committee, in partnership with the class boat builder and partner, Ovington Boats Ltd. The purpose of the survey is to gather feedback from class members and the wider sailing community on all Musto Skiff activities. This includes feedback on the boat experience, training, organised events, class marketing activities, sponsors and more. In each survey, MSCA members also have the opportunity to vote for International Committee Members and Country Representatives, as well as voting on proposed ideas for the future growth and longevity of the class. The feedback is used to ensure the successful planning and delivery of future events. It also helps the International Committee to understand what members want from the class association, and how the class can position itself to attract new and talented sailors. -
2017 Annual Class Survey
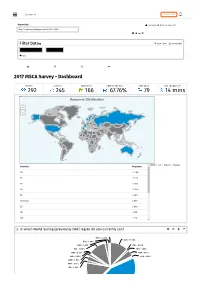
Surveys Upgrade Now Report Link Download Data & Reports http://www.questionpro.com/t/PC5elZa3A2 Filter Data Save Filter Reset Filter Survey Status All Add 2017 MSCA Survey - Dashboard VIEWED STARTED COMPLETED COMPLETION RATE DROP OUTS TIME TO COMPLETE 292 245 166 67.76% 79 14 mins 0300 Response Distribution + - World | US | Canada | Europe Countries Responses GB 44.08% DE 15.10% CH 11.43% AU 10.20% NL 4.08% Unknown 2.86% ES 2.86% SE 1.63% NO 1.22% 2. In which World Sailing (previously ISAF) region do you currently sail? Other : 0.52% AUS : 11.98% USA : 1.04% SWE : 2.08% BUL : 0.52% SUI : 11.46% CRO : 1.04% RUS : 0.52% ESP : 4.17% NZL : 0.52% FRA : 0.52% NOR : 1.56% NED : 3.12% IRL : 1.56% GER : 15.10% GBR : 44.27% Answer Count Percent 20% 40% 60% 80% 100% AUS 23 11.98% AUT 0 0% BEL 0 0% BRA 0 0% BUL 1 0.52% CAN 0 0% CRO 2 1.04% CYP 0 0% CZE 0 0% DEN 0 0% ESP 8 4.17% EST 0 0% FIN 0 0% FRA 1 0.52% GBR 85 44.27% GER 29 15.1% GRE 0 0% HKG 0 0% HUN 0 0% IRL 3 1.56% ITA 0 0% JPN 0 0% LAT 0 0% LIB 0 0% MLT 0 0% NED 6 3.12% NOR 3 1.56% NZL 1 0.52% POL 0 0% POR 0 0% RSA 0 0% RUS 1 0.52% SLO 0 0% SUI 22 11.46% SWE 4 2.08% TUR 0 0% UAE 0 0% UKR 0 0% USA 2 1.04% Other 1 0.52% Total 192 100 % 3. -
• Edition 5 • April 2011 Spring Has Finally Sprung and We Have an Abundance of Exciting Things Planned for This Year at TBYC!
www.tbyc.org • Edition 5 • April 2011 Spring has finally sprung and we have an abundance of exciting things planned for this year at TBYC! Firstly the Summer Glitter Ball on June 4th has had a huge response, and 170 of you have bought tickets - making it a massive sellout event! So ladies and gentlemen, have your sequins, diamonds and sparkles at the ready for what is guaranteed to be a fantastic night. April will be a busy month, not only for TBYC but also London, with the Royal Wedding on April 29th. We are planning a big Royal Wedding Party on that night with a red, white and blue “Back To The 80's” theme, so don't miss out on one of the biggest parties of the year! Not forgetting the Easter weekend hog roast on Sunday April 24th. Keep your eyes peeled for tickets and ticket discounts for those who buy them for both events. These will be on posters around the club and on the website. Let us know if you have been to any great events elsewhere and would like to see them at TBYC, whether it be a casino night, a cocktail party or beer tasting. Let us know - we would love to have your great ideas! Finally, we are going to start offering a combined ticket booking discount for certain events, like the hog roast and Royal Wedding party, and people who attend the Christmas party will receive a discount on tickets for New Year’s Eve. We hope this will encourage more ticket buying and bookings! Kylie Hello, I would like to introduce myself to you. -

NOR Benelux2019
! 48th. Benelux championship 2019 Notice of Race August 17th & 18th , 2019 at WV Scharendijke on the Grevelingenmeer Organizing Authority: The races will be organized by the Watersport Vereniging Scharendijke and Royal Yacht Club van België 1. RULES 1. The regatta will be governed by the rules as defined in the Racing Rules of Sailing (RRS), this NOR and the Sailing Instructions. No national prescriptions will apply. 2. The latest international class rules will apply. 3. If there is a conflict between the NOR and the S.I. the S.I. will take precedence. 4. Every person on board who has its domicile in the Netherlands or Belgium shall present its sailing license upon request at the registration.. 5. Change of crew or material during the regatta is subject to approval by the race committee. Approval will not be given when the required license cannot be shown. 6. When the word “shall” is used means that this phrase is mandatory 2. ELIGIBILITY AND ENTRIES 1. The regatta is open to all boats in the following classes: 470, Contender, Europe, FD, FJ, Finn, Laser 4.7, Laser Radial, Laser Standard, Musto Skiff, OK-jol, RS 500, RS Aero, Snipe, Solo, Splash 2. All eligible boats may register by completing the online entry form at the race management platform Manage2sail: https://www.manage2sail.com/en-BE/event/BNL2019#!/ All required information must be submitted to validate the registration. 3. All classes with at least 5 (five) competitors will have a separated ranking. All classes with less than 5 (five) competitors will race together with a ranking with handicap system. -

Yachting Western Australia – Yearbook 2013 – 2014 | Page 1 YACHTING WESTERN AUSTRALIA (INC)
YEAR BOOK 2013-2014 SHACKS HOLDEN SUPPORTING YOU ON WATER & LAND. SHACKS HOLDEN SUPPORTING YOU ON WATER & LAND. 9432 9432 SHACKS 64 QUEEN VICTORIA ST FREMANTLE www.shacksholden.com.au HOLDEN 9432 9432 SHACKS 64 QUEEN VICTORIA ST FREMANTLE [email protected] HOLDEN [email protected] DL3711 INDEX YWA Office Bearers 2 INFORMATION YWA Past Presidents 2 Sailing Pathways 12 YWA Life Members 2 Swan River Racing Committee 13 What Does Yachting WA Do For You 3 Definitions of Coastal Yacht Racing Areas 13 Club Census 18 REPORTS Recreational Skippers Ticket 19 President 5 Affiliated Yacht Clubs 21 General Manager 6 Yacht Club Information 22 Coastal Committee 7 Swan River Yacht Racing Course Marks 26 Offshore Racing Committee 7 Affiliated Class Associations 31 Racing Rules Committee 7 Class Association Information 32 Race Management Committee 8 SPECIAL EVENTS REVIEW Recreational Skippers Ticket 8 Cock of the Swan 2013 41 Safety Committee 8 Fremantle to Bali 42 Swan River Racing Committee 9 Honorary Service 43 Development & participation 9 Ron Tough Yachting Foundation 44 Cruising & Power Yacht Committee 10 WA Yachting Awards 45 Yachting WA Cruising and Power Yacht Committee 11 Front Cover: Tackers Programme at Mandurah Offshore Fishing and Sailing Club YACHTING WA BOARD OF MANAGEMENT 2013-2014 President Vice President Treasurer Board Member Board Member DENYS PEARCE MARK FITZHARDINGE JOHN HEYDON MARK DONATI ALAN JOHNS Board Member since 2010 aBoard Member since Elected August 2009. Elected August 2010 Elected August 2004 -

Notice of Race
www.fos.breizhskiff.com NOTICE OF RACE TROPHY L a c d u D E R Saturday 31st March, Sunday 1st & Monday 2nd of April 2018 Organized by : Ligue de l’Enseignement Meuse Station Nautique 51290 GIFFAUMONT Tel: 03 26 62 10 30 Email: [email protected] Preamble: French is the official language for the event. In case of translation the French text shall prevail. 1. RULES The regatta will be governed by: 1.1. The rules as defined in The Racing Rules of Sailing (2017/2020) 1.2. National regulations applying to foreign competitors defined in joined appendix named “prescriptions” 1.3. FFVOILE regulations 1.4. Police Regulations of the Lake 1.5. Class rules, unless any of them is changed by the sailing instructions 1.6. This Notice of Race. 2. ADVERTISING In accordance with World Sailing Regulation 20 (Advertising Code) as modified by the Advertising regulation of the FFVoile, the boat may be required to display advertising chosen and supplied by the organizing authority. Competitors wearing on their sailboat an advertisement other than those chosen and supplied by the organizing authority, must present the card or ad hoc authorization. The organizing authority shall submit to the race committee, before the start of the first race of the event, the list of competitors who presented their card or ad hoc authorization. 3. ELIGIBILITY AND REGISTRATION 3.1. The regatta is open to: Skiff: Moth International, RS600 FF, 18 Pieds Australien, 49er, 14 Pieds International, 49er FX, RS800, Laser 5000, Boss, B14, Musto skiff, AC10, RS700, Swift Solo, 29erXX, Cherub, Vis, IC10, 29er, 4000, Iso, RS600, Epoh, 59er, Spice, RS400, D-One, RS500, Paper Jet, RS500 Mylar, Contender, RS500 Dacron, Buzz, Moth International no foil, RS 100 10 m2, RS100 8 m2, RS300. -

Thorpe Bay Yacht Club 49Er, 29Er and Musto Skiff Open Meeting Sailing Instructions 1
Thorpe Bay Yacht Club 49er, 29er and Musto Skiff Open Meeting Sailing Instructions 1. Rules 1.1. The regatta will be governed by the ‘Rules’ as defined in Racing Rules of Sailing, the prescriptions of the RYA, the rules of the class, except if any of these are changed by these sailing instructions, and the supplementary sailing instructions. 2. Entries 2.1. Eligibility - Eligible boats may be entered by completing registration with the organising authority as in the supplementary sailing instructions. 2.2. Disclaimer of Liability - Competitors participate in the regatta entirely at their own risk. See RRS Rule 4, Decision to Race. The organising authority will not accept any liability for material damage or personal injury or death sustained in conjunction with or prior to, during or after the regatta. 2.3. Insurance - Each participating boat shall be insured with valid third party liability insurance with a minimum of £2,000,000 per event. 3. Notices to Competitors - Notices will be posted on the official notice board located in the clubhouse lobby. 4. Changes to Sailing Instructions - Any changes to the sailing instructions will be posted at least 1 hour before the start of a race they affect. 5. Safety - RRS40 is changed, flag Y will not be used. Adequate personal buoyancy must be worn by all competitors whilst afloat and the penalty for non- observance will be disqualification. Wetsuits or drysuits are not sufficient on their own. 6. Signals Made Ashore 6.1. Signals made ashore will be displayed on the flagstaff in front of the clubhouse. 6.2. -

2019 Sail Freo Notice of Race
[DP] denotes a rule for which the penalty is at the discretion of the protest committee. 1 RULES 1.1 The regatta will be governed by the rules as defined in The Racing Rules of Sailing (RRS). 1.2 [DP] The Australian Sailing Special Regulation Part 2 Off the Beach Boats will apply. 1.3 Arbitration will be conducted in accordance with RRS Appendix T. 1.4 Contender – See Appendix 1.1 regarding RRS Appendix P5 2 ADVERTISING Boats may be required to display advertising chosen and supplied by the organising authority. 3 ELIGIBILITY AND ENTRY 3.1 The regatta is open to all boats of the following classes. Optimist Intermediate Optimist Open Open Skiff Flying Ant Mirror Laser 4.7 Laser Radial Laser Standard 420 470 29er 505 Hobie 16 Musto Skiff Contender Bic Techno SB20 Etchell Flying Fifteen Viper 3.2 Classes which are not invited by NoR 3.1 above are encouraged to contact the Organising Authority and detail a proposal to attend the event with fleet numbers of six or more entries. Invitation to additional classes may be issued at the discretion of the Organising Authority. 3.3 Competitors must be financial members of a yacht or sailing club that is affiliated with a National Authority recognised by World Sailing. 3.4 Eligible boats shall enter by completing the online entry form available on the Event Website HERE 3.5 Entry submission deadlines Action Date Early Bird Entry Prize and T-Shirt 0900 Monday 30th September Design Competition 2019 Sail Freo T-Shirt guaranteed 0900 Monday 7th October for entries received before Close of Entries 0900 on Monday 14th October 3.6 Late entries may be accepted at the discretion of the Organising Authority. -

Race Officer Guide
Whitstable Yacht Club RRAACCEE OOFFFFIICCEERR GGUUIIDDEE for shore-based and committee boat starts These notes will guide you through race officer duty, from course setting through to the recording of results. If you are in doubt about any aspect of running the race, don’t hesitate to ask another sailor or club officer for help. Prior to your duty, please familiarise yourself with the sailing instructions published on page 20 and in the WYC programme. Contents p 2 Introduction p 3 Weather forecasts p 4 Getting started p 5 Safety cover p 6 Radios p 7 Setting the course p 8-10 Starting the race p 11 During the race – shorten course p 12 Finishing and recording p 12 Abandonment and cancellation p 13 Classes and handicaps p 14 Useful contact numbers p 15-17 PY handicap list and sail insignia p 18 Committee boat starts – additional information p 20-22 WYC Sailing instructions 1 Introduction The race officer has the responsibility of running a race which enables all competitors to enjoy a day of fair competition in reasonable safety. … The race officer should ensure that the race team arrives at least 1½ hours before the start of the race, with an up to date weather forecast (see page 3). For a committee boat start, the team should arrive at least 2 hours before the start. Where the procedure for a committee boat start differs, see notes in blue type. Additional information will be found on page 18. This guide was compiled in February 2009 and, as far as reasonably possible, contains information that was correct at that time.