Long and Short-Range Air Navigation on Spherical Earth
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Celestial Navigation Tutorial
NavSoft’s CELESTIAL NAVIGATION TUTORIAL Contents Using a Sextant Altitude 2 The Concept Celestial Navigation Position Lines 3 Sight Calculations and Obtaining a Position 6 Correcting a Sextant Altitude Calculating the Bearing and Distance ABC and Sight Reduction Tables Obtaining a Position Line Combining Position Lines Corrections 10 Index Error Dip Refraction Temperature and Pressure Corrections to Refraction Semi Diameter Augmentation of the Moon’s Semi-Diameter Parallax Reduction of the Moon’s Horizontal Parallax Examples Nautical Almanac Information 14 GHA & LHA Declination Examples Simplifications and Accuracy Methods for Calculating a Position 17 Plane Sailing Mercator Sailing Celestial Navigation and Spherical Trigonometry 19 The PZX Triangle Spherical Formulae Napier’s Rules The Concept of Using a Sextant Altitude Using the altitude of a celestial body is similar to using the altitude of a lighthouse or similar object of known height, to obtain a distance. One object or body provides a distance but the observer can be anywhere on a circle of that radius away from the object. At least two distances/ circles are necessary for a position. (Three avoids ambiguity.) In practice, only that part of the circle near an assumed position would be drawn. Using a Sextant for Celestial Navigation After a few corrections, a sextant gives the true distance of a body if measured on an imaginary sphere surrounding the earth. Using a Nautical Almanac to find the position of the body, the body’s position could be plotted on an appropriate chart and then a circle of the correct radius drawn around it. In practice the circles are usually thousands of miles in radius therefore distances are calculated and compared with an estimate. -

Indoor Wireless Localization Using Haversine Formula
ISSN (Online) 2393-8021 ISSN (Print) 2394-1588 International Advanced Research Journal in Science, Engineering and Technology Vol. 2, Issue 7, July 2015 Indoor Wireless Localization using Haversine Formula Ganesh L1, DR. Vijaya Kumar B P2 M. Tech (Software Engineering), 4th Semester, M S Ramaiah Institute of Technology (Autonomous Institute Affiliated to VTU)Bangalore, Karnataka, India1 Professor& HOD, Dept. of ISE, MSRIT, Bangalore, Karnataka, India2 Abstract: Indoor wireless Localization is essential for most of the critical environment or infrastructure created by man. Technological growth in the areas of wireless communication access techniques, high speed information processing and security has made to connect most of the day-to-day usable things, place and situations to be connected to the internet, named as Internet of Things(IOT).Using such IOT infrastructure providing an accurate or high precision localization is a smart and challenging issue. In this paper, we have proposed mapping model for locating a static or a mobile electronic communicable gadgets or the things to which such electronic gadgets are connected. Here, 4-way mapping includes the planning and positioning of wireless AP building layout, GPS co-ordinate and the signal power between the electronic gadget and access point. The methodology uses Haversine formula for measurement and estimation of distance with improved efficiency in localization. Implementation model includes signal measurements with wifi position, GPS values and building layout to identify the precise location for different scenarios is considered and evaluated the performance of the system and found that the results are more efficient compared to other methodologies. Keywords: Localization, Haversine, GPS (Global positioning system) 1. -

Calculating Geographic Distance: Concepts and Methods Frank Ivis, Canadian Institute for Health Information, Toronto, Ontario, Canada
NESUG 2006 Data ManipulationData andManipulation Analysis Calculating Geographic Distance: Concepts and Methods Frank Ivis, Canadian Institute for Health Information, Toronto, Ontario, Canada ABSTRACT Calculating the distance between point locations is often an important component of many forms of spatial analy- sis in business and research. Although specialized software is available to perform this function, the power and flexibility of Base SAS® makes it easy to compute a variety of distance measures. An added advantage is that these measures can be customized according to specific user requirements and seamlessly incorporated with other SAS code. This paper outlines the basic concepts and methods involved in calculating geographic distance. Topics include distance calculations in two dimensions, considerations when dealing with latitude and longitude, measuring spherical distance, and map projections. In addition, several queries and calculations based on dis- tances are also demonstrated. INTRODUCTION For many types of databases, determining the distance between locations is often of considerable interest. From a company’s customer database, for example, one might want to examine the distances between customers’ homes and the retail locations where they had made purchases. Similarly, the distance between patients and hospitals may be used as a measure of accessibility to healthcare. In both these cases, an appropriate formula is required to calculate distances. The proper formula will depend on the nature of the data, the goals of the analy- sis, and the type of co-ordinates. The purpose of this paper is to outline various considerations in calculating geographic distances and provide appropriate implementations of the formulae in SAS. Some additional summary measures based on calculated distances will also be presented. -

Haversine Formula Implementation to Determine Bandung City School Zoning Using Android Based Location Based Service
Haversine Formula Implementation to Determine Bandung City School Zoning Using Android Based Location Based Service Undang Syaripudin 1, Niko Ahmad Fauzi 2, Wisnu Uriawan 3, Wildan Budiawan Z 4, Ali Rahman 5 {[email protected] 1, [email protected] 2, [email protected] 3, [email protected] 4, [email protected] 5} Department of Informatics, UIN Sunan Gunung Djati Bandung 1,2,3,4,5 Abstract. The spread of schools in Bandung city, make the parents have difficulties choose which school is the nearest from the house. Therefore, when the children will go to school the just can go by foot. So, the purpose of this research is to make an application to determined the closest school based on zonation system using Haversine Formula as the calculation of the distance between school position with the house, and Location Based Service as the service to pointed the early position using Global Positioning System (GPS). The result of the research show that the accuracy of this calculation reaches 98% by comparing the default calculations from Google. Haversine Formula is very suitable to be applied in this research with the results which are not much different. Keywords: Global Positioning System (GPS), Bandung City, Haversine Formula, Location Based Service, zonation system, Rational Unified Process (RUP), PPDB 1 Introduction Starting in 2017, the Ministry of Education and Culture implements a zoning system for each school valid from elementary to high school/ vocational school. This zoning system aims to equalize the right to obtain education for school-age students. The PPDB revenue system is no longer based on academic achievement, but based on the distance of the student's residence with the school (zoning). -
Primer of Celestial Navigation
LIFEBOAT MANUAL By Lt. Comdr. A. E. Redifer, U.S.M.S. Lifeboat Training Officer, Avalon, Calif., Training Station *Indispensable to ordinary seamen preparing for the Lifeboat Examination. *A complete guide for anyone who may have to use a lifeboat. Construction, equipment, operation of lifeboats and other buoyant apparatus are here, along with the latest Government regulations which you need to know. 163 Pages More than 150 illustrations Indexed $2.00 METEOROLOGY WORKBOOK with Problems By Peter E. Kraght Senior Meteorologist, American Airlines, Inc. *Embodies author's experience in teaching hundreds of aircraft flight crews. *For self-examination and for classroom use. *For student navigator or meteorologist or weather hobbyist. *A good companion book to Mr. Kraght's Meteorology for Ship and Aircraft Operation, 0r any other standard reference work. 141 Illustrations Cloud form photographs Weather maps 148 Pages W$T x tl" Format $2.25 MERCHANT MARBMI OFFICERS' HANDBOOK By E. A. Turpin and W. A. MacEwen, Master Mariners "A valuable guide for both new candidates for . officer's license and the older, more experienced officers." Marine Engi- neering and Shipping Re$etu. An unequalled guide to ship's officers' duties, navigation, meteorology, shiphandling and cargo, ship construction and sta- bility, rules of the road, first aid and ship sanitation, and enlist- ments in the Naval Reserve all in one volume. 03 086 3rd Edition "This book will be a great help to not only beginners but to practical navigating officers." Harold Kildall, Instructor in Charge, Navigation School of the Washing- ton Technical Institute, "Lays bare the mysteries of navigation with a firm and sure touch . -
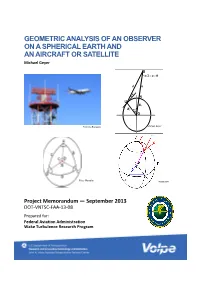
GEOMETRIC ANALYSIS of an OBSERVER on a SPHERICAL EARTH and an AIRCRAFT OR SATELLITE Michael Geyer
GEOMETRIC ANALYSIS OF AN OBSERVER ON A SPHERICAL EARTH AND AN AIRCRAFT OR SATELLITE Michael Geyer S π/2 - α - θ d h α N U Re Re θ O Federico Rostagno Michael Geyer Peter Mercator nosco.com Project Memorandum — September 2013 DOT-VNTSC-FAA-13-08 Prepared for: Federal Aviation Administration Wake Turbulence Research Program DOT/RITA Volpe Center TABLE OF CONTENTS 1. INTRODUCTION...................................................................................................... 1 1.1 Basic Problem and Solution Approach........................................................................................1 1.2 Vertical Plane Formulation ..........................................................................................................2 1.3 Spherical Surface Formulation ....................................................................................................3 1.4 Limitations and Applicability of Analysis...................................................................................4 1.5 Recommended Approach to Finding a Solution.........................................................................5 1.6 Outline of this Document ..............................................................................................................6 2. MATHEMATICS AND PHYSICS BASICS ............................................................... 8 2.1 Exact and Approximate Solutions to Common Equations ........................................................8 2.1.1 The Law of Sines for Plane Triangles.........................................................................................8 -
Haversine Formula - Wikipedia, the Free Encyclopedia
Haversine formula - Wikipedia, the free encyclopedia Haversine formula From Wikipedia, the free encyclopedia. The haversine formula is an equation important in navigation, giving great-circle distances between two points on a sphere from their longitudes and latitudes. It is a special case of a more general formula in spherical trigonometry, the law of haversines, relating the sides and angles of spherical "triangles". These names follow from the fact that they are customarily written in terms of the haversine function, given by haversin(θ) = sin2(θ/2). (The formulas could equally be written in terms of any multiple of the haversine, such as the older versine function (twice the haversine). Historically, the haversine had, perhaps, a slight advantage in that its maximum is one, so that logarithmic tables of its values could end at zero. These days, the haversine form is also convenient in that it has no coefficient in front of the sin2 function.) Contents ● 1 The haversine formula ● 2 The law of haversines ● 3 References ● 4 External links The haversine formula φ φ ∆φ φ − φ For two points on a sphere (of radius R) with latitudes 1 and 2, latitude separation = 1 2, and longitude separation ∆λ, where angles are in radians, the distance d between the two points (along a great circle of the sphere; see spherical distance) is related to their locations by the formula: http://en.wikipedia.org/wiki/Haversine_formula (1 of 5)11/18/2005 5:33:25 AM Haversine formula - Wikipedia, the free encyclopedia (the haversine formula) Let h denote haversin(d/R), given from above. -

The Forgotten Trigonometric Functions, Or How Trigonometry Was Used in the Ancient Art of Navigation (Before GPS!)
The Forgotten Trigonometric Functions, or How Trigonometry was used in the Ancient Art of Navigation (Before GPS!) Recently, as I was exploring some mathematical concept I came across some terms that were suspiciously similar to some familiar trigonometric functions. What is an excosecant? How about a Havercosine? As it turns out, these belong to a family of trigonometric functions that once enjoyed very standard usage, in very notable and practical fields, but in recent times have become nearly obsolete. ( ) Versine !"#$%& ! = 1 − cos ! !(!!!"# !) = The most basic of this family of functions is the ! versine, or versed sine. The versine, abbreviated ! 1 − cos ! versin of some angle x is actually calculated by = 2 !! ! 2 subtracting the cosine of x from 1; that is versin(x) = 1 - cos (x). Through some manipulations with half- 1 = 2 !"#! ! !! angle identities, we can see another equivalent 2 expression: Notice, we do not need the ± as the versine will always represent non-negative value (since cosine ranges from negative one to positive one, one minus these values will range from zero to two). This was especially helpful as navigators used logarithms in their calculations, so they could always take the logarithm of the versine. It is interesting that the Latin name for versine is either sinus versus (flipped sine, to distinguish from sinus rectus, the vertical sine) or sagitta, meaning arrow. It is easy to see, when looking at a drawing of the sine, cosine and versine why the reference to arrow occurs. Envision a bow and arrow; on the sketch, the arc AB is the bow, segment AB is the bowstring, and segment CD is the drawn arrow shaft, thus, the reference to an arrow. -

Haversine Navigation
Haversine Navigation Abstract This is to provide a practical means for cruise planning using either the computer spreadsheet, the hand held calculator, or applications (apps) available for the iPhone or iPad. Background Shortly after achieving the grade of Navigator with the Shrewsbury River Power Squadron in April of 1962, I took an active interest in the mathematics of sight reduction that went beyond the methods of HO 211 and HO 214. Preferring analytic over graphic voyage planning provided the motive for these studies. Please remember that this was done before the computer, GPS, and even the most basic hand held calculator. Today using data (waypoint information) from a Cruising Guide, it is easier and faster to plan with the computer. The spherical trigonometry equations taught left an ambiguity when the initial course was close to due east or west. Further solutions using the Spherical Law of Cosines fall apart when the distances are very small; short distances are most important to the vast majority of weekend sailors. Haversines resolved these issues. Today there are dozens of websites that will give you the course and distance between two points on the earth given the Latitude and Longitude of each. Many of these sites report the distance in kilometers which require a definition of the radius of the earth. The haversine method herein described uses a unit radius; thus, a distance as an angle readily resolves to nautical miles; therefore, I am going to limit this to a simple definition of the haversine and practical topics for cruise planning with the spreadsheet on the computer and to solutions on the handheld calculator as well as on the iPhone and iPad. -

Range-Based Autonomous Underwater Vehicle Navigation Expressed in Geodetic Coordinates
Range-Based Autonomous Underwater Vehicle Navigation Expressed in Geodetic Coordinates Rami S. Jabari Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering Daniel J. Stilwell, Chair Wayne L. Neu Craig A. Woolsey May 6, 2016 Blacksburg, Virginia Keywords: Autonomous Underwater Vehicle, Navigation Copyright 2016, Rami S. Jabari Range-Based Autonomous Underwater Vehicle Navigation Expressed in Geodetic Coordinates Rami S. Jabari (ABSTRACT) Unlike many terrestrial applications, GPS is unavailable to autonomous underwater ve- hicles (AUVs) while submerged due to the rapid attenuation of radio frequency signals in seawater. Underwater vehicles often use other navigation technologies. This thesis describes a range-based acoustic navigation system that utilizes range measurements from a single moving transponder with a known location to estimate the position of an AUV in geodetic coordinates. Additionally, the navigation system simultaneously estimates the currents act- ing on the AUV. Thus the navigation system can be used in locations where currents are unknown. The main contribution of this work is the implementation of a range-based navigation system in geodetic coordinates for an AUV. This range-based navigation system is imple- mented in the World Geodetic System 1984 (WGS 84) coordinate reference system. The navigation system is not restricted to the WGS 84 ellipsoid and can be applied to any refer- ence ellipsoid. This thesis documents the formulation of the navigation system in geodetic coordinates. Experimental data gathered in Claytor Lake, VA, and the Chesapeake Bay is presented. Range-Based Autonomous Underwater Vehicle Navigation Expressed in Geodetic Coordinates Rami S. -

Earth-Satellite Geometry
EARTH-REFERENCED AIRCRAFT NAVIGATION AND SURVEILLANCE ANALYSIS Michael Geyer S π/2 - α - θ d h α N U Re Re θ O Michael Geyer Frederick de Wit Navigation Vertical Plane Model Peter Mercator Federico Rostagno Spherical Surface Model Surveillance Project Memorandum — June 2016 DOT-VNTSC-FAA-16-12 Prepared for: Federal Aviation Administration Wake Turbulence Research Office DOT Volpe Center FOREWORD This document addresses a basic function of aircraft (and other vehicle) surveillance and navi- gation systems analyses — quantifying the geometric relationship of two or more locations relative to each other and to the earth. Here, geometry means distances and angles, including their projections in a defined coordinate frame. Applications that fit well with these methods include (a) planning a vehicle’s route; (b) determining the coverage region of a radar or radio installation; and (c) calculating a vehicle’s latitude and longitude from measurements (e.g., of slant- and spherical-ranges or range differences, azimuth and elevation angles, and altitudes). The approach advocated is that the three-dimensional problems inherent in navigation/surveil- lance analyses should, to the extent possible, be re-cast as a sequence of sub-problems: . Vertical-Plane Formulation (two-dimensional (2D) problem illustrated in top right panel on cover) — Considers the vertical plane containing two problem-specific locations and the center of a spherical earth, and utilizes plane trigonometry as the primary analysis method. This formulation provides closed-form solutions. Spherical-Surface Formulation (2D problem illustrated in bottom left panel on cover) — Considers two or three problem-specific locations on the surface of a spherical earth; utilizes spherical trigonometry as the primary analysis method. -

Resolving the Shortest Path Problem Using the Haversine Algorithm
Journal of Critical Reviews ISSN- 2394-5125 Vol 7, Issue 1, 2020 Resolving the Shortest Path Problem using the Haversine Algorithm Dwi Arman Prasetya1, Phong Thanh Nguyen2*, Rinat Faizullin3, Iswanto Iswanto4, Edmond Febrinicko Armay5 1University of Merdeka Malang, Malang, Indonesia. Email: [email protected] 2Department of Project Management, Ho Chi Minh City Open University, Vietnam. Email: [email protected] 3Kalashnikov Izhevsk state technical university, Russia 4Department of Engineer Profession Program, Universitas Muhammadiyah Yogyakarta, Yogyakarta, Indonesia 5Department of Physics, Lund University Received: 07.10.2019 Revised: 08.11.2019 Accepted: 09.12.2019 Abstract: Route search requires a useful and accurate algorithm to calculate the distance between two objects, especially on a round surface such as the earth. This algorithm provides a considerable circle distance between two locations on a non-flat surface. The distance of the two objects is determined based on longitude and latitude. Haversine is an algorithm that can determine the distance between two objects on the surface of a sphere. Haversine has now been developed by using a simple formula, which with computer calculations, can provide a very accurate level of precision between two points. Research with Haversine will be applied to determine the closest location. A graph is a diagram that contains specific information if interpreted correctly. The graph is used to describe various kinds of existing structures. The purpose is as a visualization of objects to make them easier to understand. The Haversine algorithm can determine the distance of two coordinates of the earth. By applying this method, the distance between the two coordinates can be determined.