Force Measurement of Basilisk Lizard Running on Water by Andrew
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lizard Inspired Tail for the Dynamic Stabilization of Robotic Bodies
Lizard Inspired Tail for the Dynamic Stabilization of Robotic Bodies A Major Qualify Project Report Submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Bachelor of Science In Mechanical Engineering By Michael Berlied _______________ Approved by: Stephen Nestinger ______________ Date Completed: April 27, 2012 ABSTRACT The purpose of this project was to determine the feasibility of a lizard inspired tail for the dynamic stabilization of robotic bodies during aerial or aggressive maneuvers. A mathematical model was created to determine the effects of various tail designs. A physical model of the tail design was fabricated and used to determine feasibility of the design and evaluate the mathematical model. ii Table of Contents Abstract ........................................................................................................................................... ii Table of Figures .............................................................................................................................. v 1.0 Introduction ............................................................................................................................... 1 2.0 Methodology ............................................................................................................................. 2 3.0 Literature Review...................................................................................................................... 3 3.1 Lizard Physiology and Tail -

Literature Cited in Lizards Natural History Database
Literature Cited in Lizards Natural History database Abdala, C. S., A. S. Quinteros, and R. E. Espinoza. 2008. Two new species of Liolaemus (Iguania: Liolaemidae) from the puna of northwestern Argentina. Herpetologica 64:458-471. Abdala, C. S., D. Baldo, R. A. Juárez, and R. E. Espinoza. 2016. The first parthenogenetic pleurodont Iguanian: a new all-female Liolaemus (Squamata: Liolaemidae) from western Argentina. Copeia 104:487-497. Abdala, C. S., J. C. Acosta, M. R. Cabrera, H. J. Villaviciencio, and J. Marinero. 2009. A new Andean Liolaemus of the L. montanus series (Squamata: Iguania: Liolaemidae) from western Argentina. South American Journal of Herpetology 4:91-102. Abdala, C. S., J. L. Acosta, J. C. Acosta, B. B. Alvarez, F. Arias, L. J. Avila, . S. M. Zalba. 2012. Categorización del estado de conservación de las lagartijas y anfisbenas de la República Argentina. Cuadernos de Herpetologia 26 (Suppl. 1):215-248. Abell, A. J. 1999. Male-female spacing patterns in the lizard, Sceloporus virgatus. Amphibia-Reptilia 20:185-194. Abts, M. L. 1987. Environment and variation in life history traits of the Chuckwalla, Sauromalus obesus. Ecological Monographs 57:215-232. Achaval, F., and A. Olmos. 2003. Anfibios y reptiles del Uruguay. Montevideo, Uruguay: Facultad de Ciencias. Achaval, F., and A. Olmos. 2007. Anfibio y reptiles del Uruguay, 3rd edn. Montevideo, Uruguay: Serie Fauna 1. Ackermann, T. 2006. Schreibers Glatkopfleguan Leiocephalus schreibersii. Munich, Germany: Natur und Tier. Ackley, J. W., P. J. Muelleman, R. E. Carter, R. W. Henderson, and R. Powell. 2009. A rapid assessment of herpetofaunal diversity in variously altered habitats on Dominica. -
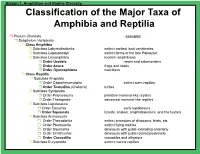
Classification of the Major Taxa of Amphibia and Reptilia
Station 1. Amphibian and Reptile Diversity Classification of the Major Taxa of Amphibia and Reptilia ! Phylum Chordata examples ! Subphylum Vertebrata ! Class Amphibia ! Subclass Labyrinthodontia extinct earliest land vertebrates ! Subclass Lepospondyli extinct forms of the late Paleozoic ! Subclass Lissamphibia modern amphibians ! Order Urodela newts and salamanders ! Order Anura frogs and toads ! Order Gymnophiona caecilians ! Class Reptilia ! Subclass Anapsida ! Order Captorhinomorpha extinct stem reptiles ! Order Testudina (Chelonia) turtles ! Subclass Synapsida ! Order Pelycosauria primitive mammal-like reptiles ! Order Therapsida advanced mammal-like reptiles ! Subclass Lepidosaura ! Order Eosuchia early lepidosaurs ! Order Squamata lizards, snakes, amphisbaenians, and the tuatara ! Subclass Archosauria ! Order Thecodontia extinct ancestors of dinosaurs, birds, etc ! Order Pterosauria extinct flying reptiles ! Order Saurischia dinosaurs with pubis extending anteriorly ! Order Ornithischia dinosaurs with pubis rotated posteriorly ! Order Crocodilia crocodiles and alligators ! Subclass Euryapsida extinct marine reptiles Station 1. Amphibian Skin AMPHIBIAN SKIN Most amphibians (amphi = double, bios = life) have a complex life history that often includes aquatic and terrestrial forms. All amphibians have bare skin - lacking scales, feathers, or hair -that is used for exchange of water, ions and gases. Both water and gases pass readily through amphibian skin. Cutaneous respiration depends on moisture, so most frogs and salamanders are -

COSTA RICA, NEW YEAR CUSTOM TOUR TRIP REPORT DECEMBER 2015/JANUARY 2016 by Eduardo Ormaeche
COSTA RICA, NEW YEAR CUSTOM TOUR TRIP REPORT DECEMBER 2015/JANUARY 2016 By Eduardo Ormaeche Resplendent Quetzal (photo Kevin Easley), one of the main targets of this tour www.birdingecotours.com [email protected] 2 | T R I P R E P O R T Costa Rica New Year Custom Tour 2015/2016 Detailed Itinerary Day 1, December 28 Birding the gardens of the Hotel Bougainvillea north of San José. Birding at different locations along Cerro de la Muerte. Birding around Savegre Mountain Lodge. Overnight Savegre Mountain Lodge Day 2, December 29 Full day birding around Savegre Mountain Lodge. Overnight Savegre Mountain Lodge Day 3, December 30 Birding Savegre Mountain Lodge and the páramo on Los Quetzales National Park. Transfer to Selva Verde Lodge near Puerto Viejo. Birding the hummingbird garden at Braulio Carrillo National Park and the Sarapiquí River. Overnight Selva Verde Lodge Day 4, December 31 Birding at La Selva Biological Station. Visit Cinco Ceibas Rainforest Reserve. Overnight Selva Verde Lodge Day 5, January 1 Birding the Virgen del Socorro road and the hummingbird garden at Braulio Carrillo National Park. Transfer to San José. Overnight Hotel Bougainvillea Day 6, January 2 Farewell and departure Our last custom tour of 2015 was a short 6-days tour in Costa Rica, which included two of the main natural habitats: The Caribbean lowlands in the northern part of the country, including visits to the famous La Selva Biological Station, the Sarapiquí River and Selva Verde Lodge, and the cloudforest of the Cordillera de Talamanca, including Cerro de la Muerte and Savegre Mountain Lodge. -

Eddies Reflections on Fisheries Conservation Departments Headwaters 3 American Fishes 10 Watermarks 4 Meanders 30 Eddies Pioneers 8 Vol
U.S. Fish and Wildlife Service Summer/Fall 2010 Eddies Reflections on Fisheries Conservation Departments Headwaters 3 American Fishes 10 Watermarks 4 Meanders 30 Eddies Pioneers 8 Vol. 3, No. 2 Publisher Features Bryan Arroyo, Assistant Director Invasive Species in our “Rock Snot” Poses U.S. Fish and Wildlife Service Fisheries and Habitat Conservation Waters–12 Problems for Fisheries Susan Jewell Conservation–22 Executive Editor John Bryan Stuart Leon, Ph.D. Deputy Editor Giant Salvinia–16 Conservation in a Richard Christian Bob Pitman Quagga-mire–26 David Britton, Ph.D. Editor Craig Springer Associate Editor Kenai’s Most Lauren Merriam Unwanted–20 Contributing writers Jeffry Anderson Jeffry Anderson Ken Peters David Britton, Ph.D. Bob Pitman John Bryan Randi Sue Smith Ricky Campbell Joe Starinchak Jason Goldberg Aaron Woldt Susan Jewell Bradley A. Young. Ph.D. Thomas McCoy Editorial Advisors Mark Brouder, U.S. Fish and Wildlife Service Ryck Lydecker, Boat Owners Association of the United States Mark Maskill, U.S. Fish and Wildlife Service Hal Schramm, Ph.D., U.S. Geological Survey Michael Smith, U.S. Fish and Wildlife Service (retired) Denise Wagner, U.S. Fish and Wildflife Service Assistant Regional Directors – Fisheries Julie Collins (Acting), Pacific Region Robert Clarke (Acting), Pacific Southwest Region Jaime Geiger, Ph.D., Northeast Region Linda Kelsey, Southeast Region Mike Oetker, Southwest Region Steve Klosiewski (Acting), Alaska Region Service Sharon Rose (Acting), Mountain–Prairie Region Mike Weimer, Midwest Region Park Contact For subscriptions, visit National www.fws.gov/eddies, email [email protected] Pythons have invaded the Florida Everglades. Read about call 505 248-6867, or write to: one man’s snake experience, returning home to Florida in Craig Springer this issue’s Meanders, page 30. -

Anolis Equestris) Should Be Removed When Face of a Watch
VOLUME 15, NUMBER 4 DECEMBER 2008 ONSERVATION AUANATURAL ISTORY AND USBANDRY OF EPTILES IC G, N H , H R International Reptile Conservation Foundation www.IRCF.org Central Netted Dragons (Ctenophorus nuchalis) from Australia are popular in captivity due to their striking appearance and great temperament. See article on p. 226. Known variously as Peters’ Forest Dragon, Doria’s Anglehead Lizard, or Abbott’s Anglehead Lizard (depending on subspecies), Gonocephalus doriae is known from southern Thailand, western Malaysia, and Indonesia west of Wallace’s Line SHANNON PLUMMER (a biogeographic division between islands associated with Asia and those with plants and animals more closely related to those on Australia). They live in remaining forested areas to elevations of 1,600 m (4,800 ft), where they spend most of their time high in trees near streams, either clinging to vertical trunks or sitting on the ends of thin branches. Their conservation status has not been assessed. MICHAEL KERN KENNETH L. KRYSKO KRISTA MOUGEY Newly hatched Texas Horned Lizard (Phrynosoma cornutum) on the Invasive Knight Anoles (Anolis equestris) should be removed when face of a watch. See article on p. 204. encountered in the wild. See article on p. 212. MARK DE SILVA Grenada Treeboas (Corallus grenadensis) remain abundant on many of the Grenadine Islands despite the fact that virtually all forested portions of the islands were cleared for agriculture during colonial times. This individual is from Mayreau. See article on p. 198. WIKIPEDIA.ORG JOSHUA M. KAPFER Of the snakes that occur in the upper midwestern United States, Populations of the Caspian Seal (Pusa caspica) have declined by 90% JOHN BINNS Bullsnakes (Pituophis catenifer sayi) are arguably the most impressive in in the last 100 years due to unsustainable hunting and habitat degra- Green Iguanas (Iguana iguana) are frequently edificarian on Grand Cayman. -

Herpetology at the Isthmus Species Checklist
Herpetology at the Isthmus Species Checklist AMPHIBIANS BUFONIDAE true toads Atelopus zeteki Panamanian Golden Frog Incilius coniferus Green Climbing Toad Incilius signifer Panama Dry Forest Toad Rhaebo haematiticus Truando Toad (Litter Toad) Rhinella alata South American Common Toad Rhinella granulosa Granular Toad Rhinella margaritifera South American Common Toad Rhinella marina Cane Toad CENTROLENIDAE glass frogs Cochranella euknemos Fringe-limbed Glass Frog Cochranella granulosa Grainy Cochran Frog Espadarana prosoblepon Emerald Glass Frog Sachatamia albomaculata Yellow-flecked Glass Frog Sachatamia ilex Ghost Glass Frog Teratohyla pulverata Chiriqui Glass Frog Teratohyla spinosa Spiny Cochran Frog Hyalinobatrachium chirripoi Suretka Glass Frog Hyalinobatrachium colymbiphyllum Plantation Glass Frog Hyalinobatrachium fleischmanni Fleischmann’s Glass Frog Hyalinobatrachium valeroi Reticulated Glass Frog Hyalinobatrachium vireovittatum Starrett’s Glass Frog CRAUGASTORIDAE robber frogs Craugastor bransfordii Bransford’s Robber Frog Craugastor crassidigitus Isla Bonita Robber Frog Craugastor fitzingeri Fitzinger’s Robber Frog Craugastor gollmeri Evergreen Robber Frog Craugastor megacephalus Veragua Robber Frog Craugastor noblei Noble’s Robber Frog Craugastor stejnegerianus Stejneger’s Robber Frog Craugastor tabasarae Tabasara Robber Frog Craugastor talamancae Almirante Robber Frog DENDROBATIDAE poison dart frogs Allobates talamancae Striped (Talamanca) Rocket Frog Colostethus panamensis Panama Rocket Frog Colostethus pratti Pratt’s Rocket -

Invasive Reptiles and Amphibians of Florida!
1 Invasive Reptiles and Amphibians of Florida! 2 Created by: Thompson Antony Lauren Diaz Sean McKnight Alana Palau JoAnna Platzer Illustrated by Lauren Diaz Invasive Ecology of Reptiles and Amphibians Dr. Steven Johnson & Dr. Christina Romagosa University of Florida 2014 ---------------------------------------------------------------------------------------------------------------------------- Welcome What is an invasive species? Where are they found in Florida? What do they look like? How can I help? You came to the right coloring book, my friend! These questions and so many more can be answered by grabbing some crayons and turning the page. Things you will need: Your favorite coloring utensils Thinking cap 3 What is an INVASIVE SPECIES ??? An invasive species is a plant or animal that is moved from its native area to another and causes economic or environmental harm to the new area. There are 6 main ways a plant or animal can move from its native home to a non-native area: 1. Biological control: moved by humans to help control other animals 2. Hitchhike: catches a free ride on cars, boats, or planes 3. Food: Some people eat frog legs or other animal parts 4. Plant trade: hiding in a plant is a sneaky way to travel 5. Pet Trade: people want animals they can’t find in their backyard 6. Intentional: Someone brought it for some specific reason For many invasive reptiles and amphibians in Florida, the animals came through the pet trade. 4 Brown Anole Anolis sagrei This is a Cuban Brown Anole! The brown anole is originally from Cuba, but came to Florida when it hitched a ride on some cargo. -
It Is Time for a New Classification of Anoles (Squamata: Dactyloidae)
Zootaxa 3477: 1–108 (2012) ISSN 1175-5326 (print edition) www.mapress.com/zootaxa/ ZOOTAXA Copyright © 2012 · Magnolia Press Monograph ISSN 1175-5334 (online edition) urn:lsid:zoobank.org:pub:32126D3A-04BC-4AAC-89C5-F407AE28021C ZOOTAXA 3477 It is time for a new classification of anoles (Squamata: Dactyloidae) KIRSTEN E. NICHOLSON1, BRIAN I. CROTHER2, CRAIG GUYER3 & JAY M. SAVAGE4 1Department of Biology, Central Michigan University, Mt. Pleasant, MI 48859, USA. E-mail: [email protected] 2Department of Biology, Southeastern Louisiana University, Hammond, LA 70402, USA. E-mail: [email protected] 3Department of Biological Sciences, Auburn University, Auburn, AL 36849, USA. E-mail: [email protected] 4Department of Biology, San Diego State University, San Diego, CA 92182, USA. E-mail: [email protected] Magnolia Press Auckland, New Zealand Accepted by S. Carranza: 17 May 2012; published: 11 Sept. 2012 KIRSTEN E. NICHOLSON, BRIAN I. CROTHER, CRAIG GUYER & JAY M. SAVAGE It is time for a new classification of anoles (Squamata: Dactyloidae) (Zootaxa 3477) 108 pp.; 30 cm. 11 Sept. 2012 ISBN 978-1-77557-010-3 (paperback) ISBN 978-1-77557-011-0 (Online edition) FIRST PUBLISHED IN 2012 BY Magnolia Press P.O. Box 41-383 Auckland 1346 New Zealand e-mail: [email protected] http://www.mapress.com/zootaxa/ © 2012 Magnolia Press All rights reserved. No part of this publication may be reproduced, stored, transmitted or disseminated, in any form, or by any means, without prior written permission from the publisher, to whom all requests to reproduce copyright material should be directed in writing. This authorization does not extend to any other kind of copying, by any means, in any form, and for any purpose other than private research use. -

Standard Common and Current Scientific Names for North American Amphibians, Turtles, Reptiles & Crocodilians
STANDARD COMMON AND CURRENT SCIENTIFIC NAMES FOR NORTH AMERICAN AMPHIBIANS, TURTLES, REPTILES & CROCODILIANS Sixth Edition Joseph T. Collins TraVis W. TAGGart The Center for North American Herpetology THE CEN T ER FOR NOR T H AMERI ca N HERPE T OLOGY www.cnah.org Joseph T. Collins, Director The Center for North American Herpetology 1502 Medinah Circle Lawrence, Kansas 66047 (785) 393-4757 Single copies of this publication are available gratis from The Center for North American Herpetology, 1502 Medinah Circle, Lawrence, Kansas 66047 USA; within the United States and Canada, please send a self-addressed 7x10-inch manila envelope with sufficient U.S. first class postage affixed for four ounces. Individuals outside the United States and Canada should contact CNAH via email before requesting a copy. A list of previous editions of this title is printed on the inside back cover. THE CEN T ER FOR NOR T H AMERI ca N HERPE T OLOGY BO A RD OF DIRE ct ORS Joseph T. Collins Suzanne L. Collins Kansas Biological Survey The Center for The University of Kansas North American Herpetology 2021 Constant Avenue 1502 Medinah Circle Lawrence, Kansas 66047 Lawrence, Kansas 66047 Kelly J. Irwin James L. Knight Arkansas Game & Fish South Carolina Commission State Museum 915 East Sevier Street P. O. Box 100107 Benton, Arkansas 72015 Columbia, South Carolina 29202 Walter E. Meshaka, Jr. Robert Powell Section of Zoology Department of Biology State Museum of Pennsylvania Avila University 300 North Street 11901 Wornall Road Harrisburg, Pennsylvania 17120 Kansas City, Missouri 64145 Travis W. Taggart Sternberg Museum of Natural History Fort Hays State University 3000 Sternberg Drive Hays, Kansas 67601 Front cover images of an Eastern Collared Lizard (Crotaphytus collaris) and Cajun Chorus Frog (Pseudacris fouquettei) by Suzanne L. -

Broken Screens: the Regulation of Live Animal Imports in the United States
Broken Screen S The Regulation of Live Animal Imports in the United States DEFENDERS OF WILDLIFE Defenders of Wildlife is a national, nonprofit membership organization dedicated to the protection of all native wild animals and plants in their natural communities. PROJECT CONTRIBUTORS The Consortium for Conservation Medicine (CCM) is a collaborative institution linking Johns Hopkins Bloomberg School of Public Health, Tufts University School of Veterinary Medicine Center for Conservation Medicine, The University of Pittsburgh Graduate School of Public Health, the University of Wisconsin-Madison Nelson Institute for Environmental Studies, the U.S. Geological Society National Wildlife Health Center and the Wildlife Trust. CCM strives to understand the links among human changes to the environment, the health of all species including humans, and the conservation of biodiversity. www.conservationmedicine.org The Invasive Species Specialist Group (ISSG) is part of the Species Survival Commission of The World Conservation Union (IUCN). The ISSG consist of about 150 scientific and policy experts on invasive species from more than 40 countries. The ISSG aims to reduce threats to natural ecosystems and the native species they contain by increasing awareness of invasive alien species, and of ways to prevent, control or eradicate them. www.issg.org ACKNOWLEDGEMENTS Defenders of Wildlife Principal Author: Peter T. Jenkins Co-authors: Kristen Genovese, Heidi Ruffler Additional assistance: Carroll Muffett, Stas Burgiel, Kelly Malsch, Timm Kroeger, Mark Cheater, Robert Irvin and Gabriela Chavarria Researcher: David Tucker Editor: Kate Davies Art Director: Jen Lee Consortium for Conservation Medicine Principal Contributor: Katherine F. Smith Additional assistance: Peter Daszak and Lisa Schloegel IUCN Invasive Species Specialist Group Principal Contributor: Michael Browne Additional assistance: Shyama Pagad, UniServices Ltd. -

New Bluetongue Lizard and Sailfin Dragon Lizard Taxa from Indonesia (Squamata:Sauria)
Australasian Journal of Herpetology Australasian12 Journal of Herpetology 24:12-15. ISSN 1836-5698 (Print) Published 30 August 2014. ISSN 1836-5779 (Online) New Bluetongue Lizard and Sailfin Dragon Lizard taxa from Indonesia (Squamata:Sauria). RAYMOND T. HOSER 488 Park Road, Park Orchards, Victoria, 3114, Australia. Phone: +61 3 9812 3322 Fax: 9812 3355 E-mail: snakeman (at) snakeman.com.au Received 10 November 2013, Accepted 6 March 2014, Published 30 August 2014. ABSTRACT The Indonesian Bluetongued Skinks (Genus Tiliqua Gray, 1825) and the Indonesian Sailfined Dragon Lizards (Genus Hydrosaurus Kaup, 1828) are common in captivity and have been subjected to extensive studies. Notwithstanding the publication of several major taxonomic revisions of both groups, there has been ongoing taxonomic confusion spanning many years. This has not been properly resolved by the most recent publications. This paper seeks to remove ongoing taxonomic instability by formally naming obvious and yet unnamed taxa from Indonesia for the first time. The urgency of these actions is underscored by the combined effects of habitat destruction and increased interest in these taxa by traders and collectors. In terms of the latter, it is important that regional lineages be maintained should there arise a need to reintroduce species into the wild at a later date. Keywords: Taxonomy; Australasia; New Guinea; Indonesia; Tiliqua; Hydrosaurus; species; gigas; Seram; Irian Jaya; Halmahera; Papua; New Guinea; subspecies; keyensis; evanescens; new species; alburyi; new subspecies; grantturneri; glennsheai. INTRODUCTION Moresby, Papua New Guinea, and believed to be distributed In spite of the global popularity of the Australasian Bluetongued throughout the east of New Guinea, east of the Huon Peninsula, Skinks (Genus Tiliqua Gray, 1825) and Sailfined Dragon Lizards as well as across the drier parts of the southern half of the (Genus Hydrosaurus Kaup, 1828) and relevant detailed island, including eastern Irian Jaya in the region of Merauke.