Capacitive Sensing for Robot Safety Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Proximity Capacitive Sensor Technology for Touch Sensing Applications
Proximity Sensing White Paper Proximity Capacitive Sensor Technology for Touch Sensing Applications By Bryce Osoinach, Systems and Applications Engineer Contents Introduction .........................................................................................................................................................3 Proximity Capacitive Sensor Overview ...............................................................................................................4 Capacitance Sensors in Touch Sensing Applications ........................................................................................5 Additional Applications for Proximity Capacitive Sensors ..................................................................................8 Multiple Electrodes and Shield Drive Technology ...............................................................................................9 Conclusion ........................................................................................................................................................11 Proximity Capacitive Sensor Technology 2 Freescale Semiconductor, Inc. Introduction In 1831 Michael Faraday discovered electro-magnetic induction. Essentially, he found that moving a conductor through a magnetic field creates voltage that is directly proportional to the speed of the movement—the faster the conductor moves, the higher the voltage. Today, inductive proximity sensors use Faraday’s Law of Electromagnetic Induction to detect the nearness of conductive materials without actually -

PCF8883 Capacitive Touch/Proximity Switch with Auto-Calibration, Large Voltage Operating Range, and Very Low Power Consumption Rev
PCF8883 Capacitive touch/proximity switch with auto-calibration, large voltage operating range, and very low power consumption Rev. 4.1 — 14 September 2016 Product data sheet 1. General description The integrated circuit PCF8883 is a capacitive touch and proximity switch that uses a patented (EDISEN) digital method to detect a change in capacitance on a remote sensing plate. Changes in the static capacitance (as opposed to dynamic capacitance changes) are automatically compensated using continuous auto-calibration. Remote sensing plates (e.g. conductive foil) can be connected directly to the IC1 or remotely using a coaxial cable. 2. Features and benefits Dynamic proximity switch Digital processing method Adjustable sensitivity, can be made very high Adjustable response time Wide input capacitance range (10 pF to 60 pF) Automatic calibration A large distance (several meters) between the sensing plate and the IC is possible Open-drain output (P-type MOSFET, external load between pin and ground) Designed for battery powered applications (IDD = 3 A, typical) Output configurable as push-button, toggle, or pulse Wide voltage operating range (VDD = 3 V to 9 V) Large temperature operating range (Tamb = 40 C to +85 C) Internal voltage regulator Available in SOIC8 and wafer level chip-size package 3. Applications Proximity detection Proximity sensing in Mobile phones Portable entertainment units Switch for medical applications Switch for use in explosive environments Vandal proof switches Transportation: Switches in or under upholstery, leather, handles, mats, and glass 1. The definition of the abbreviations and acronyms used in this data sheet can be found in Section 21. NXP Semiconductors PCF8883 Capacitive touch/proximity switch with auto-calibration Buildings: switch in or under carpets, glass, or tiles Sanitary applications: use of standard metal sanitary parts (e.g. -
Proximity Capacitive Sensor Technology for Touch Sensing Applications
Proximity Sensing White Paper Proximity Capacitive Sensor Technology for Touch Sensing Applications By Bryce Osoinach, Systems and Applications Engineer Contents Introduction .........................................................................................................................................................3 Proximity Capacitive Sensor Overview ...............................................................................................................4 Capacitance Sensors in Touch Sensing Applications ........................................................................................5 Additional Applications for Proximity Capacitive Sensors ..................................................................................8 Multiple Electrodes and Shield Drive Technology ...............................................................................................9 Conclusion ........................................................................................................................................................11 Proximity Capacitive Sensor Technology 2 Freescale Semiconductor, Inc. Introduction In 1831 Michael Faraday discovered electro-magnetic induction. Essentially, he found that moving a conductor through a magnetic field creates voltage that is directly proportional to the speed of the movement—the faster the conductor moves, the higher the voltage. Today, inductive proximity sensors use Faraday’s Law of Electromagnetic Induction to detect the nearness of conductive materials without actually -

Distinguishing Users with Capacitive Touch Communication
Distinguishing Users with Capacitive Touch Communication Tam Vu, Akash Baid, Simon Gao, Marco Gruteser, Richard Howard, Janne Lindqvist, Predrag Spasojevic, Jeffrey Walling WINLAB, Rutgers University {tamvu, baid, gruteser, reh, janne, spasojev} @winlab.rutgers.edu {simongao, jeffrey.s.walling}@rutgers.edu ABSTRACT 1. INTRODUCTION As we are surrounded by an ever-larger variety of post-PC de- Mobile devices now provide us ubiquitous access to a vast array vices, the traditional methods for identifying and authenticating of media content and digital services. They can access our emails users have become cumbersome and time-consuming. In this pa- and personal photos, open our cars [41] or our garage doors [13], per, we present a capacitive communication method through which pay bills and transfer funds between our bank accounts, order mer- a device can recognize who is interacting with it. This method ex- chandise, as well as control our homes [10]. Arguably, they now ploits the capacitive touchscreens, which are now used in laptops, provide the de-facto single-sign on access to all our content and phones, and tablets, as a signal receiver. The signal that identifies services, which has proven so elusive on the web. the user can be generated by a small transmitter embedded into a As we increasingly rely on a variety of such devices, we tend to ring, watch, or other artifact carried on the human body. We ex- quickly switch between them and temporarily share them with oth- plore two example system designs with a low-power continuous ers [26]. We may let our children play games on our smartphones transmitter that communicates through the skin and a signet ring or share a tablet with colleagues or family members. -

Design, Fabrication and Testing of a Capacitive Sensor Using Delta-Sigma Modulation Charikleia Tsagkari University of Nevada, Las Vegas, [email protected]
UNLV Theses, Dissertations, Professional Papers, and Capstones 5-1-2017 Design, Fabrication and Testing of a Capacitive Sensor Using Delta-Sigma Modulation Charikleia Tsagkari University of Nevada, Las Vegas, [email protected] Follow this and additional works at: https://digitalscholarship.unlv.edu/thesesdissertations Part of the Electrical and Computer Engineering Commons Repository Citation Tsagkari, Charikleia, "Design, Fabrication and Testing of a Capacitive Sensor Using Delta-Sigma Modulation" (2017). UNLV Theses, Dissertations, Professional Papers, and Capstones. 3049. https://digitalscholarship.unlv.edu/thesesdissertations/3049 This Thesis is brought to you for free and open access by Digital Scholarship@UNLV. It has been accepted for inclusion in UNLV Theses, Dissertations, Professional Papers, and Capstones by an authorized administrator of Digital Scholarship@UNLV. For more information, please contact [email protected]. DESIGN, FABRICATION AND TESTING OF A CAPACITIVE SENSOR USING DELTA- SIGMA MODULATION By Charikleia Tsagkari Bachelor of Science in Electrical and Computer Engineering National Technical University of Athens 2009 A thesis submitted in partial fulfillment of the requirements for the Master of Science in Engineering – Electrical Engineering Department of Electrical and Computer Engineering Howard R. Hughes College of Engineering The Graduate College University of Nevada, Las Vegas May 2017 Copyright 2017 by Charikleia Tsagkari All Rights Reserved Thesis Approval The Graduate College The University of Nevada, Las Vegas May 1, 2017 This thesis prepared by Charikleia Tsagkari entitled DESIGN, FABRICATION AND TESTING OF A CAPACITIVE SENSOR USING DELTA-SIGMA MODULATION is approved in partial fulfillment of the requirements for the degree of Master of Science in Engineering – Electrical Engineering Department of Electrical and Computer Engineering R. -

Detecting Touchscreen Events Using a Smartphone Protective Case
The Curious Case of the Curious Case: Detecting touchscreen events using a smartphone protective case Tomer Gluck, Rami Puzis, Yossi Oren and Asaf Shabtai Ben-Gurion University of the Negev Beer-Sheva, Israel [email protected], fpuzis,yos,[email protected] Abstract—Security-conscious users are very careful with soft- computation and communication functions. Farshteindiker et ware they allow their phone to run. They are much less al. suggest a method by which an implant in close proximity careful with the choices they make regarding accessories such to the phone can use the phone itself to exfiltrate data. This as headphones or chargers and only few, if any, care about method is using a transducer that can be placed inside the cyber security threats coming from the phone’s protective protective case and communicate with a web-page through case. We show how a malicious smartphone protective case the gyroscope readings. Farshteindiker et al. also discuss can be used to detect and monitor the victim’s interaction several options for supplying power to such a device. Our with the phone’s touchscreen, opening the door to keylogger- paper focuses on the data collection functionality of the like attacks, threatening the user’s security and privacy. This implant. In particular, we present a method for remotely feat is achieved by implementing a hidden capacitive sensing detecting touch screen events using a malicious smartphone mechanism inside the case. Our attack is both sensitive enough protective case, which is cheap and simple enough to be to track the user’s finger location across the screen, and mass-produced. -

Carpacio: Repurposing Capacitive Sensors to Distinguish Driver and Passenger Touches on In-Vehicle Screens
Session: Touch UIST 2017, Oct. 22–25, 2017, Québec City, Canada Carpacio: Repurposing Capacitive Sensors to Distinguish Driver and Passenger Touches on In-Vehicle Screens Edward Jay Wang1,, Jake Garrison1,, Eric Whitmire2, Mayank Goel3, Shwetak Patel1,2 Department of Electrical Paul G. Allen School of Computer School of Computer Engineering1 Science and Engineering2 Science3 University of Washington University of Washington Carnegie Mellon University Seattle, WA Seattle, WA Pittsburg, PA {ejaywang, omonoid}@uw.edu {emwhit, shwetak}@cs.washington.edu [email protected] ABSTRACT Standard vehicle infotainment systems often include touch screens that allow the driver to control their mobile phone, navigation, audio, and vehicle configurations. For the driver’s safety, these interfaces are often disabled or simplified while the car is in motion. Although this reduced functionality aids in reducing distraction for the driver, it also disrupts the usability of infotainment systems for passengers. Current infotainment systems are unaware of the seating position of their user and hence, cannot adapt. We present Carpacio, a system that takes advantage of the capacitive coupling created between the touchscreen and the electrode present in the seat when the user touches the capacitive screen. Using this capacitive coupling phenomenon, a car infotainment system can intelligently Figure 1: Carpacio is a system that differentiates whether a distinguish who is interacting with the screen seamlessly, driver or passenger touches the screen in a car by measuring and adjust its user interface accordingly. Manufacturers can the parasitically coupled signal from the screen. easily incorporate Carpacio into vehicles since the included before a driver or passenger can access the full set of seat occupancy detection sensor or seat heating coils can be features. -

Advanced RC Phase Delay Capacitive Sensor Interface Circuits for MEMS
Advanced RC Phase Delay Capacitive Sensor Interface Circuits for MEMS by Yuan Meng A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of Science Auburn, Alabama May 9, 2015 Keywords: capacitive sensor, interface circuit, RC network, phase delay, MEMS Copyright 2015 by Yuan Meng Approved by Robert Dean, Chair, Associate Professor of Electrical and Computer Engineering Thomas Baginski, Professor of Electrical and Computer Engineering Thaddeus Roppel, Associate Professor of Electrical and Computer Engineering Abstract Many types of sensors in MEMS technology convert a measurand to a proportional change in capacitance. One of the techniques of measuring capacitance is utilizing the phase delay of an RC network with a resistor and the sensor capacitor. Specifically, the state of an input square wave signal is delayed by the RC network and gives a pulse width modulated signal according to the phase delay at the output, which is proportional to the capacitance, if the resistance is fixed. However, the response of this method becomes severely nonlinear if the phase delay is bigger than approximately 45°. Two improved implementations are presented to avoid the nonlinearity caused by the capacitor being not fully charged and discharged each cycle. The first one uses a PMOSFET switch to charge the unknown capacitor and an NMOSFET to discharge it during each measurement cycle. The second one uses an analog switch to switch the resistance to be significantly lower when the capacitor needs to be fully charged or discharged in each cycle. Both methods were simulated and proved effective. -
Status and Future of Touch Technollogies
Status and Future of Touch Technologies Geoff Walker Senior Touch Technologist Intel Corporation Presented at the Pacific Northwest (PNW) Chapter of SID on May 1st, 2013 1 Agenda Status of Touch Technologies Touch Penetration Multi-Touch Infrared ITO-Replacement Materials Embedded Touch Stylus P-Cap Futures 2 Status of Touch Technologies 3 Status of Touch Source: Gizmodo (Michelangelo's "The Creation Of Adam“, in the Sistine Chapel, 1511) 4 Status of Touch Technologies By Size & Application 30”) 30”) Format - 17”) – – – Touch Technology Mobile (2” Stationary Commercial (10” Stationary Consumer (10” Large ( >30”) Projected Capacitive A A A A Surface Capacitive L Analog Resistive L A L Analog Multi-Touch Resistive (AMR) D D D Digital Multi-Touch Resistive D Surface Acoustic Wave (SAW) A D A Acoustic Pulse Recognition (APR) D A D Dispersive Signal Technology (DST) L Traditional Infrared (IR) A A Multi-Touch Infrared A E E Camera-Based Optical A A Planar Scatter Detection (PSD) E Vision-Based (In-Cell Optical) D Embedded (In-Cell/On-Cell Capacitive) A Force Sensing D A = Active L = Legacy E = Emerging D = Dead/Dying 5 Touch Penetration 6 Touch Penetration…1 What’s left to penetrate? Mobile phones – DisplaySearch (DS) estimates 95% in 2018 Tablets – 100% Ultrabooks – Intel requires touch on Ultrabooks™ on Haswell Notebooks – DS estimates 37% in 2018 All-in-ones – It’s a roller-coaster; DS estimates 23% in 2018 Monitors (consumer) – Very resistant; DS estimates <2% in 2018 Large-format – Interactive digital signage: S..L..O..W -

Prototyping a Capacitive Sensing Device for Gesture Recognition Chenglong Lin
University of Arkansas, Fayetteville ScholarWorks@UARK Computer Science and Computer Engineering Computer Science and Computer Engineering Undergraduate Honors Theses 5-2019 Prototyping a Capacitive Sensing Device for Gesture Recognition Chenglong Lin Follow this and additional works at: https://scholarworks.uark.edu/csceuht Part of the Digital Circuits Commons, Electrical and Electronics Commons, Electronic Devices and Semiconductor Manufacturing Commons, and the Service Learning Commons Recommended Citation Lin, Chenglong, "Prototyping a Capacitive Sensing Device for Gesture Recognition" (2019). Computer Science and Computer Engineering Undergraduate Honors Theses. 70. https://scholarworks.uark.edu/csceuht/70 This Thesis is brought to you for free and open access by the Computer Science and Computer Engineering at ScholarWorks@UARK. It has been accepted for inclusion in Computer Science and Computer Engineering Undergraduate Honors Theses by an authorized administrator of ScholarWorks@UARK. For more information, please contact [email protected]. Prototyping a Capacitive Sensing Device for Gesture Recognition Presented to the Department of Computer Science and Computer Engineering College of Engineering University of Arkansas Fayetteville, AR In Partial Fulfillment of the Requirements for the award of Honors for Bachelor of Science in Computer Engineering by Chenglong Lin May 2019 Abstract Capacitive sensing is a technology that can detect proximity and touch. It can also be utilized to measure position and acceleration of gesture motions. This technology has many applications, such as replacing mechanical buttons in a gaming device interface, detecting respiration rate without direct contact with the skin, and providing gesture sensing capability for rehabilitation devices. In this thesis, an approach to prototype a capacitive gesture sensing device using the Eagle PCB design software is demonstrated. -

Sensing Techniques for Tablet+Stylus Interaction
Sensing Techniques for Tablet+Stylus Interaction Ken Hinckley1, Michel Pahud1, Hrvoje Benko1, Pourang Irani1,2, Francois Guimbretiere1,3, Marcel Gavriliu1, Xiang 'Anthony' Chen1, Fabrice Matulic1, Bill Buxton1, & Andy Wilson1 1Microsoft Research, Redmond, WA 2University of Manitoba, Dept. of 3Cornell University, Information {kenh, benko, mpahud, bibuxton, Comp. Sci., Winnipeg, MB, Science Department, Ithaca, NY awilson}@microsoft.com Canada, [email protected] [email protected] ABSTRACT As witnessed by the proliferation in mobile sensing We explore grip and motion sensing to afford new [7,12,19,23,24,39], there is great potential to resolve such techniques that leverage how users naturally manipulate ambiguities using sensors, rather than foisting complexity on tablet and stylus devices during pen + touch interaction. We the user to establish the missing context [6]. As sensors and can detect whether the user holds the pen in a writing grip or computation migrate into tiny mobile devices, pens no longer tucked between his fingers. We can distinguish bare-handed need to be conceived primarily as passive intermediaries inputs, such as drag and pinch gestures produced by the without a life once they move away from the display. nonpreferred hand, from touch gestures produced by the hand holding the pen, which necessarily impart a detectable motion signal to the stylus. We can sense which hand grips the tablet, and determine the screen's relative orientation to the pen. By selectively combining these signals and using them to complement one another, we can tailor interaction to the context, such as by ignoring unintentional touch inputs while writing, or supporting contextually-appropriate tools such as a magnifier for detailed stroke work that appears Figure 1. -
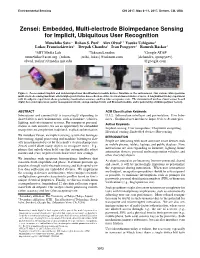
Zensei: Embedded, Multi-Electrode Bioimpedance Sensing for Implicit, Ubiquitous User Recognition
Environmental Sensing CHI 2017, May 6–11, 2017, Denver, CO, USA Zensei: Embedded, Multi-electrode Bioimpedance Sensing for Implicit, Ubiquitous User Recognition 1 1 1† 2 Munehiko Sato ∗ Rohan S. Puri Alex Olwal Yosuke Ushigome Lukas Franciszkiewicz2 Deepak Chandra3 Ivan Poupyrev3 Ramesh Raskar1 1MIT Media Lab 2Takram London 3Google ATAP [email protected], rohan, ushi, lukas @takram.com dchandra, ipoupyrev olwal, raskar @media.mit.edu{ { } { @google.com } } Figure 1. Zensei embeds implicit and uninterrupted user identification in mobile devices, furniture or the environment. Our custom, wide-spectrum multi-electrode sensing hardware allows high-speed wireless data collection of the electrical characteristics of users. A longitudinal 22-day experiment with 46 subjects experiment shows promising classification accuracy and low false acceptance rate. The miniaturized wireless Zensei sensor board (right) has a microprocessor, power management circuit, analog sensing circuit, and Bluetooth module, and is powered by a lithium polymer battery. ABSTRACT ACM Classification Keywords Interactions and connectivity is increasingly expanding to H.5.2. Information interfaces and presentation: User Inter- shared objects and environments, such as furniture, vehicles, faces - Graphical user interfaces; Input devices & strategies. lighting, and entertainment systems. For transparent personal- Author Keywords ization in such contexts, we see an opportunity for embedded recognition, to complement traditional, explicit authentication. Implicit sensing; User recognition; Ubiquitous computing, Electrical sensing; Embedded devices; Bio-sensing We introduce Zensei, an implicit sensing system that leverages INTRODUCTION bio-sensing, signal processing and machine learning to clas- sify uninstrumented users by their body’s electrical properties. People are interacting with more and more smart devices such Zensei could allow many objects to recognize users.