1. Math Olympiad Dark Arts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Snakes in the Plane
Snakes in the Plane by Paul Church A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Mathematics in Computer Science Waterloo, Ontario, Canada, 2008 c 2008 Paul Church I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract Recent developments in tiling theory, primarily in the study of anisohedral shapes, have been the product of exhaustive computer searches through various classes of poly- gons. I present a brief background of tiling theory and past work, with particular empha- sis on isohedral numbers, aperiodicity, Heesch numbers, criteria to characterize isohedral tilings, and various details that have arisen in past computer searches. I then develop and implement a new “boundary-based” technique, characterizing shapes as a sequence of characters representing unit length steps taken from a finite lan- guage of directions, to replace the “area-based” approaches of past work, which treated the Euclidean plane as a regular lattice of cells manipulated like a bitmap. The new technique allows me to reproduce and verify past results on polyforms (edge-to-edge as- semblies of unit squares, regular hexagons, or equilateral triangles) and then generalize to a new class of shapes dubbed polysnakes, which past approaches could not describe. My implementation enumerates polyforms using Redelmeier’s recursive generation algo- rithm, and enumerates polysnakes using a novel approach. -

Session 9: Pigeon Hole Principle and Ramsey Theory - Handout
Session 9: Pigeon Hole Principle and Ramsey Theory - Handout “Suppose aliens invade the earth and threaten to obliterate it in a year’s time unless human beings can find the Ramsey number for red five and blue five. We could marshal the world’s best minds and fastest computers, and within a year we could probably calculate the value. If the aliens demanded the Ramsey number for red six and blue six, however, we would have no choice but to launch a preemptive attack.” image: Frank P. Ramsey (1903-1926) quote: Paul Erd¨os (1913-1996) The following dots are in general position (i.e. no three lie on a straight line). 1) If it exists, find a convex quadrilateral in this cluster of dots. 2) If it exists, find a convex pentagon in this cluster of dots. 3) If it exists, find a convex hexagon in this cluster of dots. 4) If it exists, find a convex heptagon in this cluster of dots. 5) If it exists, find a convex octagon in this cluster of dots. 6) Draw 8 points in general position in such a way that the points do not contain a convex pentagon. 7) In my family there are 2 adults and 3 children. When our family arrives home how many of us must enter the house in order to ensure there is at least one adult in the house? 8) Show that among any collection of 7 natural numbers there must be two whose sum or difference is divisible by 10. 9) Suppose a party has six people. -

Orthocorrespondence and Orthopivotal Cubics
Forum Geometricorum b Volume 3 (2003) 1–27. bbb FORUM GEOM ISSN 1534-1178 Orthocorrespondence and Orthopivotal Cubics Bernard Gibert Abstract. We define and study a transformation in the triangle plane called the orthocorrespondence. This transformation leads to the consideration of a fam- ily of circular circumcubics containing the Neuberg cubic and several hitherto unknown ones. 1. The orthocorrespondence Let P be a point in the plane of triangle ABC with barycentric coordinates (u : v : w). The perpendicular lines at P to AP , BP, CP intersect BC, CA, AB respectively at Pa, Pb, Pc, which we call the orthotraces of P . These orthotraces 1 lie on a line LP , which we call the orthotransversal of P . We denote the trilinear ⊥ pole of LP by P , and call it the orthocorrespondent of P . A P P ∗ P ⊥ B C Pa Pc LP H/P Pb Figure 1. The orthotransversal and orthocorrespondent In barycentric coordinates, 2 ⊥ 2 P =(u(−uSA + vSB + wSC )+a vw : ··· : ···), (1) Publication Date: January 21, 2003. Communicating Editor: Paul Yiu. We sincerely thank Edward Brisse, Jean-Pierre Ehrmann, and Paul Yiu for their friendly and valuable helps. 1The homography on the pencil of lines through P which swaps a line and its perpendicular at P is an involution. According to a Desargues theorem, the points are collinear. 2All coordinates in this paper are homogeneous barycentric coordinates. Often for triangle cen- ters, we list only the first coordinate. The remaining two can be easily obtained by cyclically permut- ing a, b, c, and corresponding quantities. Thus, for example, in (1), the second and third coordinates 2 2 are v(−vSB + wSC + uSA)+b wu and w(−wSC + uSA + vSB )+c uv respectively. -

Cevians, Symmedians, and Excircles Cevian Cevian Triangle & Circle
10/5/2011 Cevians, Symmedians, and Excircles MA 341 – Topics in Geometry Lecture 16 Cevian A cevian is a line segment which joins a vertex of a triangle with a point on the opposite side (or its extension). B cevian C A D 05-Oct-2011 MA 341 001 2 Cevian Triangle & Circle • Pick P in the interior of ∆ABC • Draw cevians from each vertex through P to the opposite side • Gives set of three intersecting cevians AA’, BB’, and CC’ with respect to that point. • The triangle ∆A’B’C’ is known as the cevian triangle of ∆ABC with respect to P • Circumcircle of ∆A’B’C’ is known as the evian circle with respect to P. 05-Oct-2011 MA 341 001 3 1 10/5/2011 Cevian circle Cevian triangle 05-Oct-2011 MA 341 001 4 Cevians In ∆ABC examples of cevians are: medians – cevian point = G perpendicular bisectors – cevian point = O angle bisectors – cevian point = I (incenter) altitudes – cevian point = H Ceva’s Theorem deals with concurrence of any set of cevians. 05-Oct-2011 MA 341 001 5 Gergonne Point In ∆ABC find the incircle and points of tangency of incircle with sides of ∆ABC. Known as contact triangle 05-Oct-2011 MA 341 001 6 2 10/5/2011 Gergonne Point These cevians are concurrent! Why? Recall that AE=AF, BD=BF, and CD=CE Ge 05-Oct-2011 MA 341 001 7 Gergonne Point The point is called the Gergonne point, Ge. Ge 05-Oct-2011 MA 341 001 8 Gergonne Point Draw lines parallel to sides of contact triangle through Ge. -

Finite Projective Geometries 243
FINITE PROJECTÎVEGEOMETRIES* BY OSWALD VEBLEN and W. H. BUSSEY By means of such a generalized conception of geometry as is inevitably suggested by the recent and wide-spread researches in the foundations of that science, there is given in § 1 a definition of a class of tactical configurations which includes many well known configurations as well as many new ones. In § 2 there is developed a method for the construction of these configurations which is proved to furnish all configurations that satisfy the definition. In §§ 4-8 the configurations are shown to have a geometrical theory identical in most of its general theorems with ordinary projective geometry and thus to afford a treatment of finite linear group theory analogous to the ordinary theory of collineations. In § 9 reference is made to other definitions of some of the configurations included in the class defined in § 1. § 1. Synthetic definition. By a finite projective geometry is meant a set of elements which, for sugges- tiveness, are called points, subject to the following five conditions : I. The set contains a finite number ( > 2 ) of points. It contains subsets called lines, each of which contains at least three points. II. If A and B are distinct points, there is one and only one line that contains A and B. HI. If A, B, C are non-collinear points and if a line I contains a point D of the line AB and a point E of the line BC, but does not contain A, B, or C, then the line I contains a point F of the line CA (Fig. -

The Parameterized Complexity of Finding Point Sets with Hereditary Properties
The Parameterized Complexity of Finding Point Sets with Hereditary Properties David Eppstein1 Computer Science Department, University of California, Irvine, USA [email protected] Daniel Lokshtanov2 Department of Informatics, University of Bergen, Norway [email protected] Abstract We consider problems where the input is a set of points in the plane and an integer k, and the task is to find a subset S of the input points of size k such that S satisfies some property. We focus on properties that depend only on the order type of the points and are monotone under point removals. We show that not all such problems are fixed-parameter tractable parameterized by k, by exhibiting a property defined by three forbidden patterns for which finding a k-point subset with the property is W[1]-complete and (assuming the exponential time hypothesis) cannot be solved in time no(k/ log k). However, we show that problems of this type are fixed-parameter tractable for all properties that include all collinear point sets, properties that exclude at least one convex polygon, and properties defined by a single forbidden pattern. 2012 ACM Subject Classification Theory of computation → Design and analysis of algorithms Keywords and phrases parameterized complexity, fixed-parameter tractability, point set pattern matching, largest pattern-avoiding subset, order type 1 Introduction In this work, we study the parameterized complexity of finding subsets of planar point sets having hereditary properties, by analogy to past work on hereditary properties of graphs. In graph theory, a hereditary properties of graphs is a property closed under induced subgraphs. -
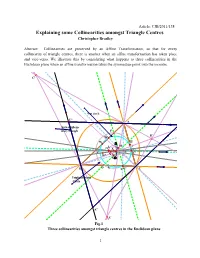
Explaining Some Collinearities Amongst Triangle Centres Christopher Bradley
Article: CJB/2011/138 Explaining some Collinearities amongst Triangle Centres Christopher Bradley Abstract: Collinearities are preserved by an Affine Transformation, so that for every collinearity of triangle centres, there is another when an affine transformation has taken place and vice-versa. We illustrate this by considering what happens to three collinearities in the Euclidean plane when an affine transformation takes the symmedian point into the incentre. C' 9 pt circle C'' A B'' Anticompleme ntary triangle F B' W' W E' L M V O X Z E F' K 4 V' K'' Y G T H N' D B U D'U' C Triplicate ratio Circle A'' A' Fig.1 Three collinearities amongst triangle centres in the Euclidean plane 1 1. When the circumconic, the nine-point conic, the triplicate ratio conic and the 7 pt. conic are all circles The condition for this is that the circumconic is a circle and then the tangents at A, B, C form a triangle A'B'C' consisting of the ex-symmedian points A'(– a2, b2, c2) and similarly for B', C' by appropriate change of sign and when this happen AA', BB', CC' are concurrent at the symmedian point K(a2, b2, c2). There are two very well-known collinearities and one less well-known, and we now describe them. First there is the Euler line containing amongst others the circumcentre O with x-co-ordinate a2(b2 + c2 – a2), the centroid G(1, 1, 1), the orthocentre H with x-co-ordinate 1/(b2 + c2 – a2) and T, the nine-point centre which is the midpoint of OH. -

The Algebra of Projective Spheres on Plane, Sphere and Hemisphere
Journal of Applied Mathematics and Physics, 2020, 8, 2286-2333 https://www.scirp.org/journal/jamp ISSN Online: 2327-4379 ISSN Print: 2327-4352 The Algebra of Projective Spheres on Plane, Sphere and Hemisphere István Lénárt Eötvös Loránd University, Budapest, Hungary How to cite this paper: Lénárt, I. (2020) Abstract The Algebra of Projective Spheres on Plane, Sphere and Hemisphere. Journal of Applied Numerous authors studied polarities in incidence structures or algebrization Mathematics and Physics, 8, 2286-2333. of projective geometry [1] [2]. The purpose of the present work is to establish https://doi.org/10.4236/jamp.2020.810171 an algebraic system based on elementary concepts of spherical geometry, ex- tended to hyperbolic and plane geometry. The guiding principle is: “The Received: July 17, 2020 Accepted: October 27, 2020 point and the straight line are one and the same”. Points and straight lines are Published: October 30, 2020 not treated as dual elements in two separate sets, but identical elements with- in a single set endowed with a binary operation and appropriate axioms. It Copyright © 2020 by author(s) and consists of three sections. In Section 1 I build an algebraic system based on Scientific Research Publishing Inc. This work is licensed under the Creative spherical constructions with two axioms: ab= ba and (ab)( ac) = a , pro- Commons Attribution International viding finite and infinite models and proving classical theorems that are License (CC BY 4.0). adapted to the new system. In Section Two I arrange hyperbolic points and http://creativecommons.org/licenses/by/4.0/ straight lines into a model of a projective sphere, show the connection be- Open Access tween the spherical Napier pentagram and the hyperbolic Napier pentagon, and describe new synthetic and trigonometric findings between spherical and hyperbolic geometry. -

Single Digits
...................................single digits ...................................single digits In Praise of Small Numbers MARC CHAMBERLAND Princeton University Press Princeton & Oxford Copyright c 2015 by Princeton University Press Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 6 Oxford Street, Woodstock, Oxfordshire OX20 1TW press.princeton.edu All Rights Reserved The second epigraph by Paul McCartney on page 111 is taken from The Beatles and is reproduced with permission of Curtis Brown Group Ltd., London on behalf of The Beneficiaries of the Estate of Hunter Davies. Copyright c Hunter Davies 2009. The epigraph on page 170 is taken from Harry Potter and the Half Blood Prince:Copyrightc J.K. Rowling 2005 The epigraphs on page 205 are reprinted wiht the permission of the Free Press, a Division of Simon & Schuster, Inc., from Born on a Blue Day: Inside the Extraordinary Mind of an Austistic Savant by Daniel Tammet. Copyright c 2006 by Daniel Tammet. Originally published in Great Britain in 2006 by Hodder & Stoughton. All rights reserved. Library of Congress Cataloging-in-Publication Data Chamberland, Marc, 1964– Single digits : in praise of small numbers / Marc Chamberland. pages cm Includes bibliographical references and index. ISBN 978-0-691-16114-3 (hardcover : alk. paper) 1. Mathematical analysis. 2. Sequences (Mathematics) 3. Combinatorial analysis. 4. Mathematics–Miscellanea. I. Title. QA300.C4412 2015 510—dc23 2014047680 British Library -

Three Years of Graphs and Music: Some Results in Graph Theory and Its
Three years of graphs and music : some results in graph theory and its applications Nathann Cohen To cite this version: Nathann Cohen. Three years of graphs and music : some results in graph theory and its applications. Discrete Mathematics [cs.DM]. Université Nice Sophia Antipolis, 2011. English. tel-00645151 HAL Id: tel-00645151 https://tel.archives-ouvertes.fr/tel-00645151 Submitted on 26 Nov 2011 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. UNIVERSITE´ DE NICE-SOPHIA ANTIPOLIS - UFR SCIENCES ECOLE´ DOCTORALE STIC SCIENCES ET TECHNOLOGIES DE L’INFORMATION ET DE LA COMMUNICATION TH ESE` pour obtenir le titre de Docteur en Sciences de l’Universite´ de Nice - Sophia Antipolis Mention : INFORMATIQUE Present´ ee´ et soutenue par Nathann COHEN Three years of graphs and music Some results in graph theory and its applications These` dirigee´ par Fred´ eric´ HAVET prepar´ ee´ dans le Projet MASCOTTE, I3S (CNRS/UNS)-INRIA soutenue le 20 octobre 2011 Rapporteurs : Jørgen BANG-JENSEN - Professor University of Southern Denmark, Odense Daniel KRAL´ ’ - Associate -

1 2. the Lattice 2 3. the Components of Plane Symmetry Groups 3 4
PLANE SYMMETRY GROUPS MAXWELL LEVINE Abstract. This paper discusses plane symmetry groups, also known as pla- nar crystallographic groups or wallpaper groups. The seventeen unique plane symmetry groups describe the symmetries found in two-dimensional patterns such as those found on weaving patterns, the work of the artist M.C. Escher, and of course wallpaper. We shall discuss the fundamental components and properties of plane symmetry groups. Contents 1. What are Plane Symmetry Groups? 1 2. The Lattice 2 3. The Components of Plane Symmetry Groups 3 4. Generating Regions 5 5. The Crystallographic Restriction 6 6. Some Illustrated Examples 7 References 8 1. What are Plane Symmetry Groups? Since plane symmetry groups basically describe two-dimensional images, it is necessary to make sense of how such images can have isometries. An isometry is commonly understood as a distance- and shape-preserving map, but we must define isometries for this new context. 2 Definition 1.1. A planar image is a function Φ: R −! fc1; : : : ; cng where c1 ··· cn are colors. Note that we must make a distinction between a planar image and an image of a function. Definition 1.2. An isometry of a planar image Φ is an isometry f : R2 −! R2 such that 8~x 2 R2; Φ(f(~x)) = Φ(~x). Definition 1.3. A translation in the plane is a function T : ~x −! ~x + ~v where ~v is a vector in the plane. Two translations T1 : ~x −! ~x + ~v1 and T2 : ~x −! ~x + ~v2 are linearly independent n if ~v1 and ~v2 are linearly independent. -
Difference Geometry
Difference Geometry Hans-Peter Schröcker Unit Geometry and CAD University Innsbruck July 22–23, 2010 Lecture 6: Cyclidic Net Parametrization Net parametrization Problem: Given a discrete structure, find a smooth parametrization that preserves essential properties. Examples: I conjugate parametrization of conjugate nets I principal parametrization of circular nets I principal parametrization of planes of conical nets I principal parametrization of lines of HR-congruence I ... Dupin cyclides I inversion of torus, revolute cone or revolute cylinder I curvature lines are circles in pencils of planes I tangent sphere and tangent cone along curvature lines I algebraic of degree four, rational of bi-degree (2, 2) Dupin cyclide patches as rational Bézier surfaces Supercyclides (E. Blutel, W. Degen) I projective transforms of Dupin cyclides (essentially) I conjugate net of conics. I tangent cones Cyclides in CAGD I surface approximation (Martin, de Pont, Sharrock 1986) I blending surfaces (Böhm, Degen, Dutta, Pratt, . ; 1990er) Advantages: I rich geometric structure I low algebraic degree I rational parametrization of bi-degree (2, 2): I curvature line (or conjugate lines) I circles (or conics) Dupin cyclides: I offset surfaces are again Dupin cyclides I square root parametrization of bisector surface Rational parametrization (Dupin cyclides) Trigonometric parametrization (Forsyth; 1912) 0 1 µ(c - a cos θ cos ) + b2 cos θ 1 Φ: f (θ, ) = B b sin θ(a - µ cos ) C a - c cos θ cos @ A b sin (c cos θ - µ) p a, c, µ 2 R; b = a2 - c2 Representation as Bézier surface 1. θ = 2 arctan u, = 2 arctan v α0u + β0 α00v + β00 2.