Color Appearance Models Second Edition
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Color Models
Color Models Jian Huang CS456 Main Color Spaces • CIE XYZ, xyY • RGB, CMYK • HSV (Munsell, HSL, IHS) • Lab, UVW, YUV, YCrCb, Luv, Differences in Color Spaces • What is the use? For display, editing, computation, compression, …? • Several key (very often conflicting) features may be sought after: – Additive (RGB) or subtractive (CMYK) – Separation of luminance and chromaticity – Equal distance between colors are equally perceivable CIE Standard • CIE: International Commission on Illumination (Comission Internationale de l’Eclairage). • Human perception based standard (1931), established with color matching experiment • Standard observer: a composite of a group of 15 to 20 people CIE Experiment CIE Experiment Result • Three pure light source: R = 700 nm, G = 546 nm, B = 436 nm. CIE Color Space • 3 hypothetical light sources, X, Y, and Z, which yield positive matching curves • Y: roughly corresponds to luminous efficiency characteristic of human eye CIE Color Space CIE xyY Space • Irregular 3D volume shape is difficult to understand • Chromaticity diagram (the same color of the varying intensity, Y, should all end up at the same point) Color Gamut • The range of color representation of a display device RGB (monitors) • The de facto standard The RGB Cube • RGB color space is perceptually non-linear • RGB space is a subset of the colors human can perceive • Con: what is ‘bloody red’ in RGB? CMY(K): printing • Cyan, Magenta, Yellow (Black) – CMY(K) • A subtractive color model dye color absorbs reflects cyan red blue and green magenta green blue and red yellow blue red and green black all none RGB and CMY • Converting between RGB and CMY RGB and CMY HSV • This color model is based on polar coordinates, not Cartesian coordinates. -
When Red Lights Look Yellow
Publications 11-2005 When Red Lights Look Yellow Joanne M. Wood Queensland University of Technology David A. Atchison Queensland University of Technology Alex Chaparro Wichita State University, [email protected] Follow this and additional works at: https://commons.erau.edu/publication Part of the Cognition and Perception Commons, Musculoskeletal, Neural, and Ocular Physiology Commons, and the Ophthalmology Commons Scholarly Commons Citation Wood, J. M., Atchison, D. A., & Chaparro, A. (2005). When Red Lights Look Yellow. Investigative Ophthalmology & Visual Science, 46(11). https://doi.org/10.1167/iovs.04-1513 This Article is brought to you for free and open access by Scholarly Commons. It has been accepted for inclusion in Publications by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. When Red Lights Look Yellow Joanne M. Wood,1 David A. Atchison,1 and Alex Chaparro2 PURPOSE. Red signals are typically used to signify danger. This observer’s distance spectacle prescription. It did not occur study was conducted to investigate a situation identified by with lens powers in excess of ϩ1.00 D, as the signals became train drivers in which red signals appear yellow when viewed too blurred for the viewer to distinguish the color. A compre- at long distances (ϳ900 m) through progressive-addition hensive eye and vision examination of the train driver who had lenses. originally reported the color misperception revealed that his METHODS. A laboratory study was conducted to investigate the corrected vision was normal. The train driver was also shown effects of defocus, target size, ambient illumination, and sur- to have normal color vision, as assessed by the Ishihara, Farns- round characteristics on the extent of the color misperception worth Lantern, and Farnsworth D15 tests. -

An Improved SPSIM Index for Image Quality Assessment
S S symmetry Article An Improved SPSIM Index for Image Quality Assessment Mariusz Frackiewicz * , Grzegorz Szolc and Henryk Palus Department of Data Science and Engineering, Silesian University of Technology, Akademicka 16, 44-100 Gliwice, Poland; [email protected] (G.S.); [email protected] (H.P.) * Correspondence: [email protected]; Tel.: +48-32-2371066 Abstract: Objective image quality assessment (IQA) measures are playing an increasingly important role in the evaluation of digital image quality. New IQA indices are expected to be strongly correlated with subjective observer evaluations expressed by Mean Opinion Score (MOS) or Difference Mean Opinion Score (DMOS). One such recently proposed index is the SuperPixel-based SIMilarity (SPSIM) index, which uses superpixel patches instead of a rectangular pixel grid. The authors of this paper have proposed three modifications to the SPSIM index. For this purpose, the color space used by SPSIM was changed and the way SPSIM determines similarity maps was modified using methods derived from an algorithm for computing the Mean Deviation Similarity Index (MDSI). The third modification was a combination of the first two. These three new quality indices were used in the assessment process. The experimental results obtained for many color images from five image databases demonstrated the advantages of the proposed SPSIM modifications. Keywords: image quality assessment; image databases; superpixels; color image; color space; image quality measures Citation: Frackiewicz, M.; Szolc, G.; Palus, H. An Improved SPSIM Index 1. Introduction for Image Quality Assessment. Quantitative domination of acquired color images over gray level images results in Symmetry 2021, 13, 518. https:// the development not only of color image processing methods but also of Image Quality doi.org/10.3390/sym13030518 Assessment (IQA) methods. -

COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING
COLOR SPACE MODELS for VIDEO and CHROMA SUBSAMPLING Color space A color model is an abstract mathematical model describing the way colors can be represented as tuples of numbers, typically as three or four values or color components (e.g. RGB and CMYK are color models). However, a color model with no associated mapping function to an absolute color space is a more or less arbitrary color system with little connection to the requirements of any given application. Adding a certain mapping function between the color model and a certain reference color space results in a definite "footprint" within the reference color space. This "footprint" is known as a gamut, and, in combination with the color model, defines a new color space. For example, Adobe RGB and sRGB are two different absolute color spaces, both based on the RGB model. In the most generic sense of the definition above, color spaces can be defined without the use of a color model. These spaces, such as Pantone, are in effect a given set of names or numbers which are defined by the existence of a corresponding set of physical color swatches. This article focuses on the mathematical model concept. Understanding the concept Most people have heard that a wide range of colors can be created by the primary colors red, blue, and yellow, if working with paints. Those colors then define a color space. We can specify the amount of red color as the X axis, the amount of blue as the Y axis, and the amount of yellow as the Z axis, giving us a three-dimensional space, wherein every possible color has a unique position. -

Cielab Color Space
Gernot Hoffmann CIELab Color Space Contents . Introduction 2 2. Formulas 4 3. Primaries and Matrices 0 4. Gamut Restrictions and Tests 5. Inverse Gamma Correction 2 6. CIE L*=50 3 7. NTSC L*=50 4 8. sRGB L*=/0/.../90/99 5 9. AdobeRGB L*=0/.../90 26 0. ProPhotoRGB L*=0/.../90 35 . 3D Views 44 2. Linear and Standard Nonlinear CIELab 47 3. Human Gamut in CIELab 48 4. Low Chromaticity 49 5. sRGB L*=50 with RGB Numbers 50 6. PostScript Kernels 5 7. Mapping CIELab to xyY 56 8. Number of Different Colors 59 9. HLS-Hue for sRGB in CIELab 60 20. References 62 1.1 Introduction CIE XYZ is an absolute color space (not device dependent). Each visible color has non-negative coordinates X,Y,Z. CIE xyY, the horseshoe diagram as shown below, is a perspective projection of XYZ coordinates onto a plane xy. The luminance is missing. CIELab is a nonlinear transformation of XYZ into coordinates L*,a*,b*. The gamut for any RGB color system is a triangle in the CIE xyY chromaticity diagram, here shown for the CIE primaries, the NTSC primaries, the Rec.709 primaries (which are also valid for sRGB and therefore for many PC monitors) and the non-physical working space ProPhotoRGB. The white points are individually defined for the color spaces. The CIELab color space was intended for equal perceptual differences for equal chan- ges in the coordinates L*,a* and b*. Color differences deltaE are defined as Euclidian distances in CIELab. This document shows color charts in CIELab for several RGB color spaces. -

Several Color Appearance Phenomena in Color Reproduction
2nd International Conference on Electronic & Mechanical Engineering and Information Technology (EMEIT-2012) Several Color Appearance Phenomena in Color Reproduction Qin-ling Dai1,a, Xiao-zhou Li2*,b, Ai Xu2 1 School of Materials Engineering (Southwest Forestry University), Kunming, China 650224 2 Key Laboratory of Pulp & Paper Science and Technology (Shandong Polytechnic University), Ministry of Education, Ji’nan, China, 250353 [email protected], bcorresponding author: [email protected] Keywords: color reproduction, color appearance, color appearance phenomena Abstract. Color perceived performance was influenced by various color appearance phenomena caused by varying viewing conditions in color reproduction process. It is necessary to do some research on the color appearance phenomena to represent the color appearance models qualitatively and quantitatively and accurate color reproduction easily. Only the phenomena were studied thoroughly, could the color transmission and reproduction be well performed. The color appearance and common color appearance phenomena of color reproduction were analyzed in this paper. And the basic theory of color appearance in color reproduction was also studied. Introduction High fidelity digital printing plays an important role in high fidelity color transmission and reproduction and it is one of the most important techniques to perform high fidelity color reproduction. High fidelity digital printing helps to perform accurate color reproduction of the original which can’t be performed because of paper and ink in traditional printing process [1]. In color printing, the color difference caused by paper, ink and viewing conditions is various. The difference is not only colorimetric difference but also different color appearance phenomena. While the different color appearance phenomenon is the leading factor to influence the color vision perceived. -

Prediction of Munsell Appearance Scales Using Various Color-Appearance Models
Prediction of Munsell Appearance Scales Using Various Color- Appearance Models David R. Wyble,* Mark D. Fairchild Munsell Color Science Laboratory, Rochester Institute of Technology, 54 Lomb Memorial Dr., Rochester, New York 14623-5605 Received 1 April 1999; accepted 10 July 1999 Abstract: The chromaticities of the Munsell Renotation predict the color of the objects accurately in these examples, Dataset were applied to eight color-appearance models. a color-appearance model is required. Modern color-appear- Models used were: CIELAB, Hunt, Nayatani, RLAB, LLAB, ance models should, therefore, be able to account for CIECAM97s, ZLAB, and IPT. Models were used to predict changes in illumination, surround, observer state of adapta- three appearance correlates of lightness, chroma, and hue. tion, and, in some cases, media changes. This definition is Model output of these appearance correlates were evalu- slightly relaxed for the purposes of this article, so simpler ated for their uniformity, in light of the constant perceptual models such as CIELAB can be included in the analysis. nature of the Munsell Renotation data. Some background is This study compares several modern color-appearance provided on the experimental derivation of the Renotation models with respect to their ability to predict uniformly the Data, including the specific tasks performed by observers to dimensions (appearance scales) of the Munsell Renotation evaluate a sample hue leaf for chroma uniformity. No par- Data,1 hereafter referred to as the Munsell data. Input to all ticular model excelled at all metrics. In general, as might be models is the chromaticities of the Munsell data, and is expected, models derived from the Munsell System per- more fully described below. -

ROCK-COLOR CHART with Genuine Munsell® Color Chips
geological ROCK-COLOR CHART with genuine Munsell® color chips Produced by geological ROCK-COLOR CHART with genuine Munsell® color chips 2009 Year Revised | 2009 Production Date put into use This publication is a revision of the previously published Geological Society of America (GSA) Rock-Color Chart prepared by the Rock-Color Chart Committee (representing the U.S. Geological Survey, GSA, the American Association of Petroleum Geologists, the Society of Economic Geologists, and the Association of American State Geologists). Colors within this chart are the same as those used in previous GSA editions, and the chart was produced in cooperation with GSA. Produced by 4300 44th Street • Grand Rapids, MI 49512 • Tel: 877-888-1720 • munsell.com The Rock-Color Chart The pages within this book are cleanable and can be exposed to the standard environmental conditions that are met in the field. This does not mean that the book will be able to withstand all of the environmental conditions that it is exposed to in the field. For the cleaning of the colored pages, please make sure not to use a cleaning agent or materials that are coarse in nature. These materials could either damage the surface of the color chips or cause the color chips to start to delaminate from the pages. With the specifying of the rock color it is important to remember to replace the rock color chart book on a regular basis so that the colors being specified are consistent from one individual to another. We recommend that you mark the date when you started to use the the book. -

Ph.D. Thesis Abstractindex
COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS December 1996 Francisco Hideki Imai Graduate School of Science and Technology Chiba University, JAPAN Dedicated to my parents ii COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS A dissertation submitted to the Graduate School of Science and Technology of Chiba University in partial fulfillment of the requirements for the degree of Doctor of Philosophy by Francisco Hideki Imai December 1996 iii Declaration This is to certify that this work has been done by me and it has not been submitted elsewhere for the award of any degree or diploma. Countersigned Signature of the student ___________________________________ _______________________________ Yoichi Miyake, Professor Francisco Hideki Imai iv The undersigned have examined the dissertation entitled COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS presented by _______Francisco Hideki Imai____________, a candidate for the degree of Doctor of Philosophy, and hereby certify that it is worthy of acceptance. ______________________________ ______________________________ Date Advisor Yoichi Miyake, Professor EXAMINING COMMITTEE ____________________________ Yoshizumi Yasuda, Professor ____________________________ Toshio Honda, Professor ____________________________ Hirohisa Yaguchi, Professor ____________________________ Atsushi Imiya, Associate Professor v Abstract In recent years, many imaging systems have been developed, and it became increasingly important to exchange image data through the computer network. Therefore, it is required to reproduce color independently on each imaging device. In the studies of device independent color reproduction, colorimetric color reproduction has been done, namely color with same chromaticity or tristimulus values is reproduced. However, even if the tristimulus values are the same, color appearance is not always same under different viewing conditions. -

The Art of Digital Black & White by Jeff Schewe There's Just Something
The Art of Digital Black & White By Jeff Schewe There’s just something magical about watching an image develop on a piece of photo paper in the developer tray…to see the paper go from being just a blank white piece of paper to becoming a photograph is what many photographers think of when they think of Black & White photography. That process of watching the image develop is what got me hooked on photography over 30 years ago and Black & White is where my heart really lives even though I’ve done more color work professionally. I used to have the brown stains on my fingers like any good darkroom tech, but commercially, I turned toward color photography. Later, when going digital, I basically gave up being able to ever achieve what used to be commonplace from the darkroom–until just recently. At about the same time Kodak announced it was going to stop making Black & White photo paper, Epson announced their new line of digital ink jet printers and a new ink, Ultrachrome K3 (3 Blacks- hence the K3), that has given me hope of returning to darkroom quality prints but with a digital printer instead of working in a smelly darkroom environment. Combine the new printers with the power of digital image processing in Adobe Photoshop and the capabilities of recent digital cameras and I think you’ll see a strong trend towards photographers going digital to get the best Black & White prints possible. Making the optimal Black & White print digitally is not simply a click of the shutter and push button printing. -
Rethinking Color Cameras
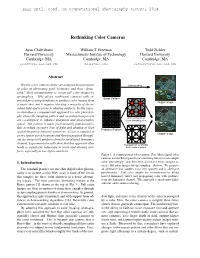
Rethinking Color Cameras Ayan Chakrabarti William T. Freeman Todd Zickler Harvard University Massachusetts Institute of Technology Harvard University Cambridge, MA Cambridge, MA Cambridge, MA [email protected] [email protected] [email protected] Abstract Digital color cameras make sub-sampled measurements of color at alternating pixel locations, and then “demo- saick” these measurements to create full color images by up-sampling. This allows traditional cameras with re- stricted processing hardware to produce color images from a single shot, but it requires blocking a majority of the in- cident light and is prone to aliasing artifacts. In this paper, we introduce a computational approach to color photogra- phy, where the sampling pattern and reconstruction process are co-designed to enhance sharpness and photographic speed. The pattern is made predominantly panchromatic, thus avoiding excessive loss of light and aliasing of high spatial-frequency intensity variations. Color is sampled at a very sparse set of locations and then propagated through- out the image with guidance from the un-aliased luminance channel. Experimental results show that this approach often leads to significant reductions in noise and aliasing arti- facts, especially in low-light conditions. Figure 1. A computational color camera. Top: Most digital color cameras use the Bayer pattern (or something like it) to sub-sample 1. Introduction color alternatingly; and then they demosaick these samples to create full-color images by up-sampling. Bottom: We propose The standard practice for one-shot digital color photog- an alternative that samples color very sparsely and is otherwise raphy is to include a color filter array in front of the sensor panchromatic. -

Illumination and Distance
PHYS 1400: Physical Science Laboratory Manual ILLUMINATION AND DISTANCE INTRODUCTION How bright is that light? You know, from experience, that a 100W light bulb is brighter than a 60W bulb. The wattage measures the energy used by the bulb, which depends on the bulb, not on where the person observing it is located. But you also know that how bright the light looks does depend on how far away it is. That 100W bulb is still emitting the same amount of energy every second, but if you are farther away from it, the energy is spread out over a greater area. You receive less energy, and perceive the light as less bright. But because the light energy is spread out over an area, it’s not a linear relationship. When you double the distance, the energy is spread out over four times as much area. If you triple the distance, the area is nine Twice the distance, ¼ as bright. Triple the distance? 11% as bright. times as great, meaning that you receive only 1/9 (or 11%) as much energy from the light source. To quantify the amount of light, we will use units called lux. The idea is simple: energy emitted per second (Watts), spread out over an area (square meters). However, a lux is not a W/m2! A lux is a lumen per m2. So, what is a lumen? Technically, it’s one candela emitted uniformly across a solid angle of 1 steradian. That’s not helping, is it? Examine the figure above. The source emits light (energy) in all directions simultaneously.