Transverse Oscillations of an Underwater Beam-Cable System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 2. Electrical Theory
Open Research Online The Open University’s repository of research publications and other research outputs Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea Thesis How to cite: Mitchell, Andrew George Cairncross (2014). Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea. PhD thesis The Open University. For guidance on citations see FAQs. c 2014 A.G.C. Mitchell Version: Version of Record Link(s) to article on publisher’s website: http://dx.doi.org/doi:10.21954/ou.ro.00009a49 Copyright and Moral Rights for the articles on this site are retained by the individual authors and/or other copyright owners. For more information on Open Research Online’s data policy on reuse of materials please consult the policies page. oro.open.ac.uk Thesis: Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea Author: Andrew George Cairncross Mitchell BSc. (Hons.) Electronics and Microprocessor Engineering, University of Strathclyde, 1984 Thesis: Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea Submitted for PhD, 30th September 2012 The Open University Faculty of Mathematics, Computing and Technology Thesis: Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea Thesis: Theoretical and Experimental Investigations Into Umbilical Cables for Communications Under the Sea Abstract Continual advances are being made in the control and monitoring of subsea oil wells by the application of new technology for sensors, subsea processing and communications devices. With these advances, the demands on the subsea umbilical are constantly increasing with deployment lengths and depths growing and the quantity of controlled functions now greater than ever. -

Ss521-Ah-Pro-010 0910-Lp-103-2583 Revision 1
Downloaded from http://www.everyspec.com SS521-AH-PRO-010 0910-LP-103-2583 REVISION 1 TECHNICAL MANUAL U.S. NAVY DIVING UMBILICAL (UBA MK 20 AND MK 21) DESCRIPTION, MATERIALS, AND ASSEMBLY GPC, A Joint Venture Contract N00024-01-D-4018 SUPERSEDES: SS521-AH-PRO-010, APRIL 1997. DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED. PUBLISHED BY DIRECTION OF COMMANDER, NAVAL SEA SYSTEMS COMMAND. Downloaded from http://www.everyspec.com Downloaded from http://www.everyspec.com SS521-AH-PRO-010 0910-LP-103-2583 REVISION 1 TECHNICAL MANUAL U.S. NAVY DIVING UMBILICAL (UBA MK 20 AND MK 21) DESCRIPTION, MATERIALS, AND ASSEMBLY GPC, A Joint Venture Contract N00024-01-D-4018 SUPERSEDES: SS0521-AH-PR0-010, APRIL 1997. DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED. PUBLISHED BY DIRECTION OF COMMANDER, NAVAL SEA SYSTEMS COMMAND. 24 FEBRUARY 2005 Downloaded from http://www.everyspec.com SS521-AH-PRO-010 LIST OF EFFECTIVE PAGES Date of Issue: Original ...........................................................0.................................................................... April 15, 1997 Revision ..........................................................1.............................................................. February 24, 2005 Total number of pages in this publication is 75, consisting of the following: Page No. Change No. Title and A ...................................................................................................................................................1 Change -

Amron 8225I-UM 2-Diver Air Control Systems User Manual REV
Instruction Manual for Amron International, Inc. Model 8225i & 8225iC-01 2-Diver Air Control Systems S/N: 1380 Aspen Way, Vista California 92081-8349 United States of America Phone: (760) 208-6500 Fax (760) 599-3857 email: [email protected] web: www.amronintl.com This manual and the information contained herein are provided for use as an operation and maintenance guide. No license or rights to manufacture, reproduce, or sell either the manual or articles described herein are given. Amron International, Inc. reserves the right to change specifications without notice. Copyright© 2021 Amron International, Inc. MODEL 8225i & 8225iC-01 USER MANUAL TABLE OF CONTENTS 1. INTRODUCTION AND SPECIFICATIONS ............................................................................................ 1 1.1 Introduction .................................................................................................................................... 1 1.2 Specifications Air Control .............................................................................................................. 2 1.3 Specifications Depth Monitoring (Pneumo) ................................................................................... 3 1.4 Specifications Communications (8225iC-01 Model Only) ............................................................. 4 1.5 Specifications Enclosure ............................................................................................................... 4 2. OPTIONS AND ACCESSORIES .......................................................................................................... -
Seeking Signals in The
$: t j ! Ij ~ ,l IOJ I ~ , I I I! 1I I 1 " Edited by Elizabeth N. Shor Layout by jo p. griffith June 1997 Published by: Marine Physical Laboratory ofthe Scripps Institution of Oceanography University of California, San Diego We gratefully acknowledge the following for use of their photographs in this publication: Christine Baldwin W. Robert Cherry Defense Nuclear Agency Fritz Goro William S. Hodgkiss Alan C. Jones MPL Photo Archives SIO Archives (UCSD) Eric T. Slater SIO Reference Series 97-5 ii Contents Introduction: How MPL Came To Be Betty Shor 1 Carl Eckart and the Marine Physical Laboratory Leonard Liebermann 6 Close Encounter of the Worst Kind Fred Fisher and Christine Baldwin 9 Early Days of Seismic and Magnetic Programs at MPL Arthur D. Raft 10 Recollections of Work at the Marine Physical Laboratory: A Non-Academic Point of View Dan Gibson 23 Capricorn Expedition, 1952 Alan C. Jones 39 Que Sera Sera R. J. Smith 42 A Beginning in Undersea Research Fred Noel Spiess ....... 46 The Value of MPL to the Navy Charles B. Bishop 51 The Outhouse Fred Fisher ....... 54 Exploring the Gulf of Alaska and Beyond George G. Shor, Jr 55 Chinook Expedition, 1956 Alan C. Jones 59 Operation HARDTACK I W. Robert Cherry 62 DELTIC and DIMUS, Two Siblings Victor C. Anderson 65 MPL and ARTEMIS Victor C. Anderson 71 Early Days of MPL Christine Baldwin 78 There's Always a Way Around the Rules George G. Shor, Jr 82 iii A Saga from Graduate Student to FLIP Fred Fisher 85 Anchoring FLIP in Deep Water Earl Bronson 95 Then There was SLIP Fred Fisher ...... -
Environmental Statement
Environmental Statement INFORMATION SHEET Project name: Beatrice Wind Farm Demonstrator Project DTI Project Reference: D/2875/2005 Type of project: Demonstration of offshore wind farm Undertaker name: Talisman Energy (UK) Limited Address: 163 Holburn Street Aberdeen AB10 6BZ Licensees/Owners: Talisman Energy (UK) Limited Anticipated commencement of works: May 2006 Short description of project: Proposed installation and operation of two stand- alone wind turbine generating units (WTGs) to provide electrical power to the Beatrice platforms. The WTGs will be supported on small steel jackets piled into the seabed, and will be 88m high with blades 63m long. The WTGs will be linked to the Beatrice AP platform by a buried umbilical containing the electrical cable. Date and reference number of any Beatrice Decommissioning Programme earlier Statement related to this RDBF/003/00006C-01 and 02 project: December 2004 Significant environmental impacts Underwater noise from piling identified: Potential interaction with birds at sea Statement prepared by: Talisman Energy (UK) Limited – 1– TALISMAN ENVIRONMENTAL STATEMENT ACKNOWLEDGEMENTS Talisman is grateful for the support, advice and comments received from all organisations and individuals during the consultation programme. Thanks are due to the Moray Firth Partnership for help in organising major stakeholder meetings, and to the University of Aberdeen Lighthouse Field Station for access to unpublished data. This Environmental Statement was prepared with support from BMT Cordah Limited. Design and production by The Big Picture. – 2– CONTENTS CONTENTS 1 NON-TECHNICAL SUMMARY . .9 1.1 Introduction . .9 1.2 Description of proposed project . .10 1.3 Environmental setting for the proposed WTGs . .11 1.4 Consultation programme . -
Subsea Umbilical and Riser Integrity Monitoring
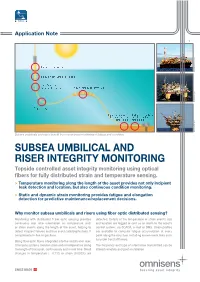
Application Note 1 Sunlight - temperature © Stéphane © Bommert Bend stiffener - strain and fatigue Shock/abrasion/ clashing - temperature Buoyancy modules - temperature © Øyvind Hagen Weight - fatigue Touch-down point - Geohazard - landslide, abrasion, friction - seismic - strain/ temperature temperature © Michael Grimes Subsea umbilicals and risers benefi t from continuous monitoring of fatigue and condition. SUBSEA UMBILICAL AND RISER INTEGRITY MONITORING Topside controlled asset integrity monitoring using optical fi bers for fully distributed strain and temperature sensing. > Temperature monitoring along the length of the asset provides not only incipient leak detection and location, but also continuous condition monitoring. > Static and dynamic strain monitoring provides fatigue and elongation detection for predictive maintenance/replacement decisions. Why monitor subsea umbilicals and risers using fiber optic distributed sensing? Monitoring with distributed fi ber optic sensing provides detected. Details of the temperature or strain event’s size continuous real time information on temperature and/ and location are logged or sent as an alarm to the asset’s or strain events along the length of the asset, helping to control system, via SCADA, e-mail or SMS. Strain profi les detect incipient failures and thus avoid catastrophic loss. It are available to compute fatigue accumulation at every compliments in-line inspections. point along the structure, including known weak links such as under bend stiffeners. Using fi ber optic fi bers integrated into the umbilical or riser, Omnisens systems monitor strain and/or temperature along The frequency and type of information transmitted can be the length of that asset, continuously and in real time. Small altered remotely and post-installation. changes in temperature (± 0.1°C) or strain (0.002%) are 2 Umbilicals Umbilicals are increasing in length, weight, complexity and power transmission ability in response to deep- water production and subsea processing demand. -

Powering the Blue Economy: Exploring Opportunities for Marine Renewable Energy in Martime Markets
™ Exploring Opportunities for Marine Renewable Energy in Maritime Markets April 2019 This report is being disseminated by the U.S. Department of Energy (DOE). As such, this document was prepared in compliance with Section 515 of the Treasury and General Government Appropriations Act for fiscal year 2001 (Public Law 106-554) and information quality guidelines issued by DOE. Though this report does not constitute “influential” information, as that term is defined in DOE’s information quality guidelines or the Office of Management and Budget’s Information Quality Bulletin for Peer Review, the study was reviewed both internally and externally prior to publication. For purposes of external review, the study benefited from the advice and comments of nine energy industry stakeholders, U.S. Government employees, and national laboratory staff. NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. -

ATMOSPHERIC DIVING SUITS Kyznecov RR, Egorov IB
УДК 004.9 ATMOSPHERIC DIVING SUITS Kyznecov R.R., Egorov I.B., Scientific adviser: senior teacher Labusheva T.M. Siberian Federal University In our lives, information technology is found almost in everything - in smart stoves and in supercomputers. And atmospheric diving suits are not an exception. The report is dedicated to them. It will show the way they are connected to our future profession and what they can do. The most important periods of the atmospheric diving suit evolution are given below: LETHBRIDGE 1715 (UK) The first recorded attempt at protecting a diver in a rigid armor was done by John Lethbridge of Devonshire. It happened in England in 1715. The oak suit offered by him had a viewing port and holes for the diver’s arms. Water was kept out of the suit by greased leather cuffs which sealed around the operator’s arms. The device was said to have made many working dives to 60ft/18m. Lethbridge’s device probably performed as claimed. It is known from the painstaking work of Belgian expert, Robert Stenuit. Working under the protection of Comex with assistance from Comex’s founder, Henri Delauze, Stenuit imitated and operated as the "Lethbridge Engine," using only materials and techniques available in day time. JIM In 1960s an English company called DHB was interested very mush in Atmospheric Diving Suits. With the help of the government it started to perfect the Peress Tritonia suit from 1930 that it found out by coincidence and luck. After performing some tests with the old suit it became obvious that the joints had to be designed again. -
Manned Space Flight Applications Glenair Discrete Interconnect Designs and Technologies Have Been a Part of Manned Space Flight for These Past 50+ Years
GLENAIR • JANUARY 2021 • VOLUME 25 • NUMBER 1 for Manned Space Behind-the-scenes at Glenair GSS, Salem GER PLUS an in-depth look at INTERCONNECT TECHNOLOGY Flight space radiation 50+ Years of GLENAIR Crewed-Flight Interconnect A Select History of Glenair Connectors and Backshells Design History in Manned Space Flight Applications Glenair discrete interconnect designs and technologies have been a part of manned space flight for these past 50+ years. And, as mentioned, we have demonstrated capability in-house to integrate our many unique and signature interconnect technologies into turnkey systems and assemblies. In each of the following examples, Glenair performed exactly in this manner, acting not merely as a supplier, but as an application engineering and design partner to these landmark programs. Glass-Sealed Hermetics for the X-38 Crew Return Vehicle Glenair supplied specialized glass-sealed hermetic connectors to The X-38 program, an experimental autonomous spacecraft designed and built for the purposes of shuttling space crew back to Earth in an orbital emergency. The X-38 Glenair has been an essential go-to supplier and design partner for Crew Return Vehicle hermetically-sealed connectors on space flight programs since the 1980s. < Hermetic sealing available in circular and rectangular packages Glenair: The Most Trusted QwikClamp® Backshells for the International Space Station The Glenair QwikClamp® backshell was purpose-designed for use on the ISS. Name in Manned Space Select parts were gold plated for resistance to atomic oxygen corrosion and radiation damage, others were supplied in our “M” code electroless nickel plating. All designs were equipped with a unique strain relief clamp that eliminated sharp surfaces and angles to prevent Connectors and Cables potential damage to astronaut life support space suits and lenair’s history of interconnect innovation for manned space Commander Ed White’s “Golden gloves. -

Developing Submergence Science for the Next Decade (DESCEND–2016)
Developing Submergence Science for the Next Decade (DESCEND–2016) Workshop Proceedings January 14-15, 2016 ii Table of Contents ACKNOWLEDGMENTS ............................................................................................................ iv EXECUTIVE SUMMARY ............................................................................................................ 1 BENTHIC ECOSYSTEMS ........................................................................................................... 11 COASTAL ECOSYSTEMS .......................................................................................................... 24 PELAGIC ECOSYSTEMS ........................................................................................................... 28 POLAR SYSTEMS .................................................................................................................... 31 BIOGEOCHEMISTRY ............................................................................................................... 41 ECOLOGY AND MOLECULAR BIOLOGY ................................................................................... 48 GEOLOGY .............................................................................................................................. 53 PHYSICAL OCEANOGRAPHY ................................................................................................... 59 APPENDICES .......................................................................................................................... 65 Appendix -

Land Beneath the Waves, Submerged Landscapes and Sea Level Change
EUROPEAN MARINE BOARD Land Beneath the Waves Submerged landscapes and sea level change A joint geoscience-humanities strategy for European Continental Shelf Prehistoric Research Land Beneath the Waves: Submerged landscapes and sea level change Land Beneath the Waves: Position Paper 21 Wandelaarkaai 7 I 8400 Ostend I Belgium Tel.: +32(0)59 34 01 63 I Fax: +32(0)59 34 01 65 E-mail: [email protected] www.marineboard.eu www.marineboard.eu European Marine Board The Marine Board provides a pan-European platform for its member organizations to develop common priorities, to advance marine research, and to bridge the gap between science and policy in order to meet future marine science challenges and opportunities. The Marine Board was established in 1995 to facilitate enhanced cooperation between European marine science organizations towards the development of a common vision on the research priorities and strategies for marine science in Europe. Members are either major national marine or oceanographic institutes, research funding agencies, or national consortia of universities with a strong marine research focus. In 2014, the Marine Board represents 35 Member Organizations from 18 countries. The Board provides the essential components for transferring knowledge for leadership in marine research in Europe. Adopting a strategic role, the Marine Board serves its member organizations by providing a forum within which marine research policy advice to national agencies and to the European Commission is developed, with the objective of promoting the establishment of the European marine Research Area. www.marineboard.eu European Marine Board Member Organizations UNIVERSITÉS MARINES Irish Marine Universities National Research Council of Italy Consortium MASTS Design: Zoeck nv Cover image: Diver surveying Pavlopetri Early Bronze Age site (Credit: J. -

Reprocessing Summary and Guide for Fujinon/Fujifilm Flexible GI Endoscopes
│ Medical Systems U.S.A., Inc. – Endoscopy Division Reprocessing Summary and Guide for Fujinon/Fujifilm Flexible GI Endoscopes Flexible endoscopes are reusable medical devices which require special handling after each clinical use to render them safe for subsequent patient procedures. Endoscopic instruments should be subjected to appropriate reprocessing steps as described in detail in each endoscope Operation Manual/Instructions for Use (IFU). Reprocessing procedures are device-specific due to the fact that though seemingly similar in external appearance, their internal designs particularly lumens in indirect patient contact may vary significantly from one model to the next even within the same brand and/or endoscope type. Individuals involved in the reprocessing of flexible endoscopes should be adequately trained on device-specific instrumentation and adhere to infection prevention and control standards. It is recommended that healthcare facilities should establish institutional quality assurance and safety programs addressing all endoscopy activities including endoscope preparation, reprocessing, maintenance, tracking, etc. Written standard operating procedures (SOPs) should be developed for endoscopy activities including documentation of comprehensive training and competency requirements for staff associated with endoscope use and preparation of instruments for subsequent patient procedures. Reprocessing can be broken down into the following basic steps: 1) Pre-Cleaning (performed in the examination room) 2) Leak Testing (performed in a “cleaning room”/decontamination area) 3) Cleaning/Rinsing (performed in a “cleaning room”/decontamination area) 4) High-Level Disinfection/Rinsing/Final Drying (performed in a “cleaning room”/decontamination area) This IFU Summary Guide has been prepared based upon Fujinon/Fujifilm manual reprocessing recommendations as described in Fujinon/Fujifilm Operation Manuals (IFUs).