A Software Architecture for Embedded Telematics Devices on Linux Master of Science Thesis in Secure and Dependable Computer Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Create an Email with Subject Title “Embedded Software Engineer”, Email a Copy of Your Resume to [email protected]
To Apply for This Position: Create an email with subject title “Embedded Software Engineer”, email a copy of your resume to [email protected] Location Address: ALLEN PARK, MI,48101 Position Description: TITLE: Embedded Software Engineer ‐ Hypervisor OS technologies This position is responsible to develop QNX and Android operating system images for Ford infotainment products. This includes creating and integrating code for: bootloader, kernel, drivers, type 1 hypervisor, and build environment. Skills Required: • Lead the design, bring‐up and support of QNX and Android operating system images • Create virt‐io drivers for QNX or Android guest operating systems • Participate in root cause analysis of hardware quality problems and software defects • Participate in system design, documentation, and testing to deliver a best‐in‐class infotainment system Experience Required: • 5+ years operating system experience involving Linux or QNX • 5+ years C/C++ software development experience on embedded, mobile, or consumer electronic platforms Experience Preferred: • Experience with Type 1 hypervisors • Experience creating virt‐io drivers • Mastery of C/C++ language, GNU tool chain, and Unix (QNX, Linux, or equivalent) • Experience with embedded build systems including QNX system builder, buildroot, yocto, or equivalent • Knowledge of in‐vehicle signaling and communication mechanisms such as CAN • Proficiency with revision control including Git, Subversion, or equivalent • Multi‐site software project team experience Education Required: • Bachelor's degree in Computer Engineering, Electrical Engineering, Computer Science, or related Education Preferred: • Master's degree in Computer Engineering, Electrical Engineering or Computer Science Additional Information: Web Based Assessment not required for this position. Visa Sponsorship and Domestic Relocation is available for this position. -

Efficient Inter-Core Communications on Manycore Machines
ZIMP: Efficient Inter-core Communications on Manycore Machines Pierre-Louis Aublin Sonia Ben Mokhtar Gilles Muller Vivien Quema´ Grenoble University CNRS - LIRIS INRIA CNRS - LIG Abstract—Modern computers have an increasing num- nication mechanisms enabling both one-to-one and one- ber of cores and, as exemplified by the recent Barrelfish to-many communications. Current operating systems operating system, the software they execute increasingly provide various inter-core communication mechanisms. resembles distributed, message-passing systems. To sup- port this evolution, there is a need for very efficient However it is not clear yet how these mechanisms be- inter-core communication mechanisms. Current operat- have on manycore processors, especially when messages ing systems provide various inter-core communication are intended to many recipient cores. mechanisms, but it is not clear yet how they behave In this report, we study seven communication mech- on manycore processors. In this report, we study seven anisms, which are considered state-of-the-art. More mechanisms, that are considered state-of-the-art. We show that these mechanisms have two main drawbacks that precisely, we study TCP, UDP and Unix domain sock- limit their efficiency: they perform costly memory copy ets, pipes, IPC and POSIX message queues. These operations and they do not provide efficient support mechanisms are supported by traditional operating sys- for one-to-many communications. We do thus propose tems such as Linux. We also study Barrelfish message ZIMP, a new inter-core communication mechanism that passing, the inter-process communication mechanism of implements zero-copy inter-core message communications and that efficiently handles one-to-many communications. -

D-Bus, the Message Bus System Training Material
Maemo Diablo D-Bus, The Message Bus System Training Material February 9, 2009 Contents 1 D-Bus, The Message Bus System 2 1.1 Introduction to D-Bus ......................... 2 1.2 D-Bus architecture and terminology ................ 3 1.3 Addressing and names in D-Bus .................. 4 1.4 Role of D-Bus in maemo ....................... 6 1.5 Programming directly with libdbus ................. 9 1 Chapter 1 D-Bus, The Message Bus System 1.1 Introduction to D-Bus D-Bus (the D originally stood for "Desktop") is a relatively new inter process communication (IPC) mechanism designed to be used as a unified middleware layer in free desktop environments. Some example projects where D-Bus is used are GNOME and Hildon. Compared to other middleware layers for IPC, D-Bus lacks many of the more refined (and complicated) features and for that reason, is faster and simpler. D-Bus does not directly compete with low level IPC mechanisms like sock- ets, shared memory or message queues. Each of these mechanisms have their uses, which normally do not overlap the ones in D-Bus. Instead, D-Bus aims to provide higher level functionality, like: Structured name spaces • Architecture independent data formatting • Support for the most common data elements in messages • A generic remote call interface with support for exceptions (errors) • A generic signalling interface to support "broadcast" type communication • Clear separation of per-user and system-wide scopes, which is important • when dealing with multi-user systems Not bound to any specific programming language (while providing a • design that readily maps to most higher level languages, via language specific bindings) The design of D-Bus benefits from the long experience of using other mid- dleware IPC solutions in the desktop arena and this has allowed the design to be optimised. -

OS Selection for Dummies
OS SELECTION HOW TO CHOOSE HOW TO CHOOSE Choosing your OS is the first step, so take the time to consider your choice fully. There are many parameters to take into account: l Is this a new project or the evolution of an existing product? l Using the same SW stack? Re-using existing code? l Is your team familiar with a particular OS? Ø Using an OS you are already comfortable with can help l What are the HW constraints of your system? Ø Some operating systems require more memory/processing power than others l Have no SW team? Not sure about the above? Ø Contact us so we can help you decide! Ø We can also introduce you to one of our many partners! 1 OS SELECTION OPEN SOURCE VS. COMMERCIAL OS Embedded OS BSP Provider $ Cost Open-Source OS Boundary Devices • Embedded Linux / Android Embedded Linux $0, included • Large pool of developers available with Board Purchase • Strong community • Royalty-free And / or partners 3rd Party - Commercial OS Partners • QNX / Win10 IoT / Green Hills $>0, depends on • Professional support requirements • Unique set of development tools 2 OS SELECTION OPEN SOURCE SELECTION OS SELECTION PROS CONS Embedded Linux Most powerful / optimized Complexity for newcomers solution, maintained by NXP • Build systems Ø Yocto / Buildroot Simpler solution, makefile- Not as flexible as Yocto Ø Everything built from scratch based, maintained by BD Desktop-like approach, Harder to customize, non- Package-based distribution easy-to-use atomic updates, no cross- • Ubuntu / Debian compilation SDK Apt install / update, millions • Packages installed from server of prebuilt packages available Android Millions of apps available, same number of developers, Resource-hungry, complex • AOSP-based (no GMS) development environment, BSP modifications (HAL) • APK applications IDE + debugging tools 3 SOFTWARE PARTNERS Boundary Devices has an industry-leading group of software partners. -

Message Passing Model
Message Passing Model Giuseppe Anastasi [email protected] Pervasive Computing & Networking Lab. (PerLab) Dept. of Information Engineering, University of Pisa PerLab Based on original slides by Silberschatz, Galvin and Gagne Overview PerLab Message Passing Model Addressing Synchronization Example of IPC systems Message Passing Model 2 Operating Systems Objectives PerLab To introduce an alternative solution (to shared memory) for process cooperation To show pros and cons of message passing vs. shared memory To show some examples of message-based communication systems Message Passing Model 3 Operating Systems Inter-Process Communication (IPC) PerLab Message system – processes communicate with each other without resorting to shared variables. IPC facility provides two operations: send (message ) – fixed or variable message size receive (message ) If P and Q wish to communicate, they need to: establish a communication link between them exchange messages via send/receive The communication link is provided by the OS Message Passing Model 4 Operating Systems Implementation Issues PerLab Physical implementation Single-processor system Shared memory Multi-processor systems Hardware bus Distributed systems Networking System + Communication networks Message Passing Model 5 Operating Systems Implementation Issues PerLab Logical properties Can a link be associated with more than two processes? How many links can there be between every pair of communicating processes? What is the capacity of a link? Is the size of a message that the link can accommodate fixed or variable? Is a link unidirectional or bi-directional? Message Passing Model 6 Operating Systems Implementation Issues PerLab Other Aspects Addressing Synchronization Buffering Message Passing Model 7 Operating Systems Overview PerLab Message Passing Model Addressing Synchronization Example of IPC systems Message Passing Model 8 Operating Systems Direct Addressing PerLab Processes must name each other explicitly. -

The Glib/GTK+ Development Platform
The GLib/GTK+ Development Platform A Getting Started Guide Version 0.8 Sébastien Wilmet March 29, 2019 Contents 1 Introduction 3 1.1 License . 3 1.2 Financial Support . 3 1.3 Todo List for this Book and a Quick 2019 Update . 4 1.4 What is GLib and GTK+? . 4 1.5 The GNOME Desktop . 5 1.6 Prerequisites . 6 1.7 Why and When Using the C Language? . 7 1.7.1 Separate the Backend from the Frontend . 7 1.7.2 Other Aspects to Keep in Mind . 8 1.8 Learning Path . 9 1.9 The Development Environment . 10 1.10 Acknowledgments . 10 I GLib, the Core Library 11 2 GLib, the Core Library 12 2.1 Basics . 13 2.1.1 Type Definitions . 13 2.1.2 Frequently Used Macros . 13 2.1.3 Debugging Macros . 14 2.1.4 Memory . 16 2.1.5 String Handling . 18 2.2 Data Structures . 20 2.2.1 Lists . 20 2.2.2 Trees . 24 2.2.3 Hash Tables . 29 2.3 The Main Event Loop . 31 2.4 Other Features . 33 II Object-Oriented Programming in C 35 3 Semi-Object-Oriented Programming in C 37 3.1 Header Example . 37 3.1.1 Project Namespace . 37 3.1.2 Class Namespace . 39 3.1.3 Lowercase, Uppercase or CamelCase? . 39 3.1.4 Include Guard . 39 3.1.5 C++ Support . 39 1 3.1.6 #include . 39 3.1.7 Type Definition . 40 3.1.8 Object Constructor . 40 3.1.9 Object Destructor . -
Message Passing
COS 318: Operating Systems Message Passing Jaswinder Pal Singh Computer Science Department Princeton University (http://www.cs.princeton.edu/courses/cos318/) Sending A Message Within A Computer Across A Network P1 P2 Send() Recv() Send() Recv() Network OS Kernel OS OS COS461 2 Synchronous Message Passing (Within A System) Synchronous send: u Call send system call with M u send system call: l No buffer in kernel: block send( M ) recv( M ) l Copy M to kernel buffer Synchronous recv: u Call recv system call M u recv system call: l No M in kernel: block l Copy to user buffer How to manage kernel buffer? 3 API Issues u Message S l Buffer (addr) and size l Message type, buffer and size u Destination or source send(dest, msg) R l Direct address: node Id, process Id l Indirect address: mailbox, socket, recv(src, msg) channel, … 4 Direct Addressing Example Producer(){ Consumer(){ ... ... while (1) { for (i=0; i<N; i++) produce item; send(Producer, credit); recv(Consumer, &credit); while (1) { send(Consumer, item); recv(Producer, &item); } send(Producer, credit); } consume item; } } u Does this work? u Would it work with multiple producers and 1 consumer? u Would it work with 1 producer and multiple consumers? u What about multiple producers and multiple consumers? 5 Indirect Addressing Example Producer(){ Consumer(){ ... ... while (1) { for (i=0; i<N; i++) produce item; send(prodMbox, credit); recv(prodMbox, &credit); while (1) { send(consMbox, item); recv(consMbox, &item); } send(prodMbox, credit); } consume item; } } u Would it work with multiple producers and 1 consumer? u Would it work with 1 producer and multiple consumers? u What about multiple producers and multiple consumers? 6 Indirect Communication u Names l mailbox, socket, channel, … u Properties l Some allow one-to-one mbox (e.g. -
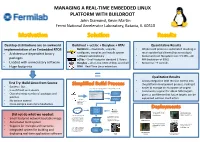
MANAGING a REAL-TIME EMBEDDED LINUX PLATFORM with BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510
MANAGING A REAL-TIME EMBEDDED LINUX PLATFORM WITH BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510 Desktop distributions are an awkward Buildroot + ucLibc + Busybox + RTAI Quantitative Results implementation of an Embedded RTOS Buildroot – downloads, unpacks, • Whole build process is automated resulting in • Architecture-dependent binary configures, compiles and installs system much quicker build times (hours not days) software automatically • Kernel and root filesystem size: 3.5 MB – 20 packages uClibc – Small-footprint standard C library MB (reduction of 99%) • Loaded with unnecessary software Busybox – all-in-one UNIX utilities and shell • Boot-time: ~9 seconds • Huge footprints RTAI – Real-Time Linux extensions = Qualitative Results • Allows integration with revision control into First Try: Build Linux from Source the platform development process, making it • Success! But.. 2. Buildroot’s menuconfig generates a package configuration file easier to manage an ecosystem of targets • Is as difficult as it sounds and kernel configuration file • Community support for x86 & ARM targets Linux Kernel • Overwhelming number of packages and Configuration gives us confidence that future targets can be patches Package supported without much effort 1. Developer Configuration • No version control configures build via Buildroot’s • Cross-compile even more headaches menuconfig Internet Build Process Power Supply Control Quench Protection Git / CVS / SVN and Regulation for the System for Tevatron Did not do what we needed: Fermilab Linac Electron Lens (TEL II) 3. The build process pulls 4. The output from the software packages from build process is a kernel • Small-footprint network bootable image the internet and custom bzImage bzImage file with an softare packages from a integrated root filesystem ARM Cortex A-9 source code repository file PC/104 AMD • Automated build system Geode SBC Beam Position Monitor Power Supply Control prototype for Fermilab and Regulation for • Support for multiple architectures 5. -
Linux Based Mobile Operating Systems
INSTITUTO SUPERIOR DE ENGENHARIA DE LISBOA Área Departamental de Engenharia de Electrónica e Telecomunicações e de Computadores Linux Based Mobile Operating Systems DIOGO SÉRGIO ESTEVES CARDOSO Licenciado Trabalho de projecto para obtenção do Grau de Mestre em Engenharia Informática e de Computadores Orientadores : Doutor Manuel Martins Barata Mestre Pedro Miguel Fernandes Sampaio Júri: Presidente: Doutor Fernando Manuel Gomes de Sousa Vogais: Doutor José Manuel Matos Ribeiro Fonseca Doutor Manuel Martins Barata Julho, 2015 INSTITUTO SUPERIOR DE ENGENHARIA DE LISBOA Área Departamental de Engenharia de Electrónica e Telecomunicações e de Computadores Linux Based Mobile Operating Systems DIOGO SÉRGIO ESTEVES CARDOSO Licenciado Trabalho de projecto para obtenção do Grau de Mestre em Engenharia Informática e de Computadores Orientadores : Doutor Manuel Martins Barata Mestre Pedro Miguel Fernandes Sampaio Júri: Presidente: Doutor Fernando Manuel Gomes de Sousa Vogais: Doutor José Manuel Matos Ribeiro Fonseca Doutor Manuel Martins Barata Julho, 2015 For Helena and Sérgio, Tomás and Sofia Acknowledgements I would like to thank: My parents and brother for the continuous support and being the drive force to my live. Sofia for the patience and understanding throughout this challenging period. Manuel Barata for all the guidance and patience. Edmundo Azevedo, Miguel Azevedo and Ana Correia for reviewing this document. Pedro Sampaio, for being my counselor and college, helping me on each step of the way. vii Abstract In the last fifteen years the mobile industry evolved from the Nokia 3310 that could store a hopping twenty-four phone records to an iPhone that literately can save a lifetime phone history. The mobile industry grew and thrown way most of the proprietary operating systems to converge their efforts in a selected few, such as Android, iOS and Windows Phone. -

Operating System Components for an Embedded Linux System
INSTITUTEFORREAL-TIMECOMPUTERSYSTEMS TECHNISCHEUNIVERSITATM¨ UNCHEN¨ PROFESSOR G. F ARBER¨ Operating System Components for an Embedded Linux System Martin Hintermann Studienarbeit ii Operating System Components for an Embedded Linux System Studienarbeit Executed at the Institute for Real-Time Computer Systems Technische Universitat¨ Munchen¨ Prof. Dr.-Ing. Georg Farber¨ Advisor: Prof.Dr.rer.nat.habil. Thomas Braunl¨ Author: Martin Hintermann Kirchberg 34 82069 Hohenschaftlarn¨ Submitted in February 2007 iii Acknowledgements At first, i would like to thank my supervisor Prof. Dr. Thomas Braunl¨ for giving me the opportunity to take part at a really interesting project. Many thanks to Thomas Sommer, my project partner, for his contribution to our good work. I also want to thank also Bernard Blackham for his assistance by email and phone at any time. In my opinion, it was a great cooperation of all persons taking part in this project. Abstract Embedded systems can be found in more and more devices. Linux as a free operating system is also becoming more and more important in embedded applications. Linux even replaces other operating systems in certain areas (e.g. mobile phones). This thesis deals with the employment of Linux in embedded systems. Various architectures of embedded systems are introduced and the characteristics of common operating systems for these devices are reviewed. The architecture of Linux is examined by looking at the particular components such as kernel, standard C libraries and POSIX tools for embedded systems. Furthermore, there is a survey of real-time extensions for the Linux kernel. The thesis also treats software development for embedded Linux ranging from the prerequi- sites for compiling software to the debugging of binaries. -
Building Meego with OBS an Introduction to the Meego Build Infrastructure
» The Linux Foundation Building MeeGo with OBS An Introduction to the MeeGo Build Infrastructure .................. By Rudolf Streif, The Linux Foundation June 2011 A Publication By The Linux Foundation Characters from the MeeGo Project (http://www.meego.com) http://www.linuxfoundation.org Background Building a Linux distribution from scratch can be a daunting task. Besides the obligatory Linux kernel itself with its myriad of configuration options, a working Linux distribution requires hundreds if not thousands of additional packages to form a viable platform for desktop, server, mobile or any other type of specialized applications. For embedded Linux solutions, the complexity scales with the need to support multiple and different processor architectures, hardware platforms with limited resources, requirements for cross toolchains, and more. The MeeGo project leverages the strengths of the Open Build Service (OBS) for distribution and application development. MeeGo has established a 6-months release cadence mounting two releases per year in April and October in addition to maintenance releases in-between. To support this, the MeeGo OBS environment builds bootable MeeGo images for the various MeeGo device categories and user experiences (Handset, Netbook, Tablet PC, In-vehicle Infotainment, and Smart TV) targeting multiple different hardware platforms for IA, ARM, etc. For application development, the MeeGo OBS allows developers to easily build their software packages utilizing the same infrastructure the MeeGo distributions were built with, validating dependencies and providing binary compliance. In this whitepaper, we will provide a brief introduction to the MeeGo build infrastructure and how it is utilized to support the MeeGo development process. Then we demonstrate the use of the OBS WebUI and the command-line client osc with step-by-step instructions. -
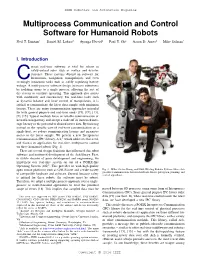
Multiprocess Communication and Control Software for Humanoid Robots Neil T
IEEE Robotics and Automation Magazine Multiprocess Communication and Control Software for Humanoid Robots Neil T. Dantam∗ Daniel M. Lofaroy Ayonga Hereidx Paul Y. Ohz Aaron D. Amesx Mike Stilman∗ I. Introduction orrect real-time software is vital for robots in safety-critical roles such as service and disaster response. These systems depend on software for Clocomotion, navigation, manipulation, and even seemingly innocuous tasks such as safely regulating battery voltage. A multi-process software design increases robustness by isolating errors to a single process, allowing the rest of the system to continue operating. This approach also assists with modularity and concurrency. For real-time tasks such as dynamic balance and force control of manipulators, it is critical to communicate the latest data sample with minimum latency. There are many communication approaches intended for both general purpose and real-time needs [19], [17], [13], [9], [15]. Typical methods focus on reliable communication or network-transparency and accept a trade-off of increased mes- sage latency or the potential to discard newer data. By focusing instead on the specific case of real-time communication on a single host, we reduce communication latency and guarantee access to the latest sample. We present a new Interprocess Communication (IPC) library, Ach,1 which addresses this need, and discuss its application for real-time, multiprocess control on three humanoid robots (Fig. 1). There are several design decisions that influenced this robot software and motivated development of the Ach library. First, to utilize decades of prior development and engineering, we implement our real-time system on top of a POSIX-like Operating System (OS)2.