Cranfield University Wesley Linton Analysis Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Liste Des Participants Au 22/08/2011 Sous Réserve
Liste des participants au 22/08/2011 Sous réserve WEKK-END "FLORIO" C'est un bel évènement gratuit pour le public à Saint-Brieuc et dans la communauté d'agglomération de Saint-Brieuc le dernier week-end du mois d'août les 26, 27 et 28 août. Entre autre, une montée de régularité en ville en Bretagne le dimanche 28 août ! Cet évènement, "La Coupe Florio", déjà connu pour son succès, 200 000 spectateurs il y à 84 ans en 1927, est remis sur le devant de la scène à l'initiative de "Saint-Brieuc Entreprises" qui coordonne l'évènement, avec la complicité l'Armor Trophy Automobile (ATA) bien connu pour ses organisations en véhicules anciens sportifs avec la participation de la FIVA de la FFVE, de l'ABVA, de l'ACO et bien sûr de nombreux partenaires. Week-end "à la carte" PROGRAMME: · Vendredi 26 août : Concours d'élégance, en nocturne 35 véhicules "capots longs à n'en plus finir " · Samedi 27 août : Découverte de la baie de St-Brieuc / expo, 200 véhicules - autos - motos - utilitaires solex o 08h00 à 09h30 : Arrivée des véhicules, 10h00 départ o 10h30 à 13h30 : Découverte du Pays de Saint-Brieuc : Boucle de 50 à 60km à avec un arrêt "dégustation" à mi-parcours. o 13h30 Retour des véhicules au parc des promenades o 13h30 à 18h30: Exposition des véhicules au parc des Promenades et dans les rues piétonnes du centre-ville de Saint-Brieuc. · Dimanche 28 août : Montée historique, 80 véhicules à caractère "sportif" o Matin : Essais o Après midi : Montée de régularité NOTA : FFVE : Fédération Française de Véhicules d'Epoque FIVA : Fédération Internationale de Véhicules Anciens ABVA : Association Bretonne de Véhicules Anciens ATA : Armor Trophée Automobile ACO : Automobile Club de L'Ouest Vendredi 26 août 2011 21h00 à 24h00 Concours d'élégance Coordination Gilles Gaucher Délégué régional Fédération Française Véhicules Epoque FFVE Le coup d'envoi de cette édition 2011 sera donné à 21hOO lors du concours d'élégance par Claude DELAGNEAU, Président de la Fédération Française de Véhicules d'Epoque. -

2013-Carlisle-Import-Kit
OFFICIAL DIRECTORY PARTNER VISIT BUILDING T FOR YOUR EVENT SHIRTS AT THE CARLISLE STORE WELCOME ED BUCZESKIE, EVENT MANAGER IF YOU FIND YOUR PRIZE, BUY IT. IT MAY BE GONE SOON elcome to the 28th edition of the Carlisle Import & his is our second year as an offi cial partner of Carlisle WKit Nationals, the event that’s oft en referred to as TEvents, and we’re proud to be working with Carlisle an international celebration. Each year, we have vehicles to create these directories. Pick up a free copy of our from at least seven countries and nearly 40 unique magazines at one of the several newsstands at the show. manufacturers. In addition to the aforementioned Carlisle Import & Kit Nationals is a place for import vehicles, we have replicas that pay tribute to dreamers, where someone with a good skill set and numerous manufacturers from a variety of countries. some time can use sweat-equity to create the replica If that’s not enough, we also have kit vehicles that are Cobra of their dreams. Or if you want to change out totally unique creations from some incredible designers. your old-fashioned carburetor to a modern injection We are honored to host all of the clubs, groups and system, you’ll fi nd what you need here. individuals that make up this great show! In today’s world, we all spend a lot of time on My role in this international celebration is to the Internet, both for business and for our hobbies. provide an enjoyable venue with activities and But nothing beats walking down an aisle fi lled with guests that will ultimately make for an unforgettable vendors who are enthusiasts just like you, who are glad weekend. -

The Magazine for Lotus and Caterham Seven Enthusiasts © © Logo Is the Property of the Lotus Seven Club G.B
L O W F L Y I N G The Magazine for Lotus and Caterham Seven enthusiasts © © Logo is the property of The Lotus Seven Club G.B. Unauthorised use is strictly forbidden B r i t a i n PARTS FOR ALL SEVEN MODELS - 1957 TO DATE RAPID MAIL ORDER SERVICE, VISA EXPORT ORDERS WELCOME ENGINE BUILDING, TUNING, NEW & EXCHANGE UNITS TRANSMISSION, NEW & RECONDITIONED SERVICING, REPAIRS & RESTORATIONS ACCIDENT REPAIRS We have available 6 x 14 FORD centre JUPITER WHEELS and 6 x 13 SUPERLITES in FORD and TRIUMPH stud patterns. These are no longer available as original equipment but we have limited stocks to replace those damaged wheels. HISTORIC SEVEN PARTS SUPPLIERS FACTORY APPOINTED PARTS & SERVICE CENTRE H E D L I N E ^ H COM PONENTS TEL: (01883) 346515 FAX: (01883) 341604 TIMBER HALL. 19 TIMBER LANE, CATERHAM, SURREY CR3 6LZ ENGLAND 9 Ja m e s W h itin g 38 Glenfield Road, Ashford, Surrey TW15 1JL Telephone: 01784 241466 Fax: 01784 250915 AAAJOR SERVICE FORD ZETEC (or annual service) Comprehensive packages are available £105.00 + PARTS for the ZETEC engine installation which INTERIM SERVICE includes ail the necessary components. (or six months) Main package consists of approximately £65.00 + p a r t s 150 parts to install the engine, which Prices quoted are for X/F, ZETEC, include mountings (engine & alternator), K-series & VAUXHALL hoses, header tank, water tubes, stainless steel hose clips, nuts, bolts washes etc. Kit comes complete with We stock a full range of service and repair parts for the SEVEN and offer an efficient drawings, parts listings and instructions. -

2018 Brochure 245X167mm.Pdf
2016 Brochure Covers_245x167mm_V1.indd 2 24/02/2017 15:38 OWN THE ROAD The road can be your friend or your adversary. Some roads are benign and easy to enjoy time with. Others make it their business to challenge you – throwing you cheeky turns, switchbacks and gradients. These are the roads that the Caterham driver, with their light feet and fast hands, actively seeks out; the roads that give it all they’ve got but never quite have enough to take down the expert pilot and the legendary Seven – a tag team made in automotive combat heaven. Driving doesn’t have to be a fight. It’s just more fun sometimes if you get in the ring. THE SEVEN FAMILY SEVEN270 SEVEN310 Plenty of smiles, as the Seven 270’s free-revving Born out of a happy accident, the Seven 310 has a At a little over 500kg and with engines Ford Sigma engine provides all–round driving power and rev limit increase over the Seven 270 that ranging from 80 to 310bhp, the Seven enjoyment. produces the very best from the Sigma engine. offers a broad range of performance 0–60 MPH TOP SPEED POWER PACKS 0–60 MPH TOP SPEED POWER PACKS from swift to astonishing, with the key 60 60 60 60 60 60 60 60 60 60 60 60 MPH 5.00 SECSMPH MPH 122MPH MPHMPH 135MPH BHP MPH 4.90 SECSMPH MPH 127MPH MPHMPH 152MPH BHP attribute being copious amounts of fun. PERFORMANCE100 100 100 100 100 100 PERFORMANCE100 100 100 100 100 100 KPH KPH KPH KPH KPH KPH KPH KPH KPH KPH KPH KPH ENGINE 1.6 LITRE FORD SIGMA ENGINE 1.6 LITRE FORD SIGMA 60 100 6060 100100 6060 100100 60 100 60 100 6060 100100 6060 100100 60 100 MPH KPH MPH MPH KPH KPH MPH MPH KPH KPH MPH KPH MPH KPH MPH MPH KPH KPH MPH MPH KPH KPH MPH KPH SEVEN360 SEVEN420 SEVEN620 Being propelled by a Ford Duratec 2.0L engine, the Stepping up a gear in performance, the Seven 420 Having a supercharged engine, the Seven 620 is our fastest Seven 360 blends performance and exhilaration gains 30 more horsepower over the Seven 360, ever road car. -

GEAR SELECTOR the Newsletter of the GOLDEN ERA AUTO RACING CLUB QUEENSLAND INC
July 2020 GEAR SELECTOR The Newsletter of the GOLDEN ERA AUTO RACING CLUB QUEENSLAND INC. PO Box 5280, Kenmore East. 4069 www.gear.org.au The Golden Era Auto Racing Club promotes the preservation of the racing & sports cars of the golden age of Australian motor sport. GEAR organizes non-competitive Drive Days for the pleasurable use and enjoyment of the cars in a safe, regulated, affordable and social motoring environment. NEWSLETTER EDITIONS FOR 2020….. In Gear Gear Selector Newsletters will be issued in News, views and updates from the President, February, April, June, August, October and December. At least that is the plan! David Chilton: INSIDE THIS ISSUE July In Gear- from the President 1 Editorial 2 Hello Members, Drivers List January 2020 3 Photos 4 It was great to be back at the track after having to GEAR Details 5 cancel the previous four scheduled monthly Cars for Sale 6 events. Despite the forecast 75 members entered hoping to blow off some steam and have a social day out. The drivers’ briefing was held outside with a megaphone, this will be the new norm for the foreseeable future. We can’t take a trick so far this year with the weather on our GEAR Days. Only 3 meetings, With the popularity of the tin tops, we needed to and all of them wet! Hopefully Thursday 27 have two groups of Yellow and Green. This August at QR will be a fine, cloudless day, and contributed to each round taking much longer 80+ members will join us for the meeting. -

Complete Kit Car December, 2015 Westfield Megas2000
COMPLETE KIT CAR RETRO RESTYLE GKD LEGEND Modern Mk3 MX-5 makeover Supercharged BMW power WWW.COMPLETEKITCAR.CO.UK DECEMBER 2015 – ISSUE 108 OPUS HISTORY How the kit car scene kicked off UK hot-rodding DECEMBER 2015 £4.75 Issue 108 On sale 13 November to 10 December BUILD DRIVE ENJOY • BUILD DRIVE ENJOY • BUILD DRIVE ENJOY • BUILD DRIVE ENJOY • BUILD DRIVE ENJOY Veranti-Lamberti V3000 ST NO EXCUSES! • Story Behind... Opus This car was built by a kit car novice in a single... sogarage... what will you build this winter? WIN! Autosport International • tickets GKD Legend • Readers Westfield Mega S2000 build • Temporary Garages • Turbocharging TVR based bodykit www.completekitcar.co.uk UK’s fi rst Cheetah replica RUNNING REPORTS • KITS AT THE SPA SIX-HOUR • INDUSTRY AND CLUB NEWS • OUR CARS • SHOWS TURBOS TAKE COVER HONDA-FIELD Get the lowdown Keep your kit dry this Westfi eld Mega S2000 – on turbocharging winter – we assess reader’s build of the best your kit car portable garages Westy money can buy Follow us on @CKCMagazine Reader’s Car – Westfield S2000 54Bill Bourne has built an amazing Honda VTEC engined Westfield. Here’s how. Our Cars 60Here’s what the CKC team members have been up to with their kit cars. Product Focus – Portable Garages 64Don’t let the lack of a garage put you off building a kit car. Here’s another way. Running Reports 68More news from real kit car builders in the real world. Products – Christmas Special 74A bumper selection of new products just perfect for Christmas. Theory – Turbocharging 76Chris Pickering looks at the appeal and potential of turbocharging your kit car. -

Nottingham Sports Car Club 2004 Speed Championship - Provisional Results 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Nottingham Sports Car Club 2004 Speed Championship - Provisional results 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 alsh ward A Score, Best 8 Three Sisters Aintree Curborough Shelsley W Loton Park Curborough Colerne Harewood MIRA Curborough (L) Hethel Three Sisters (L) Harewood Elvington Thoresby Thoresby Position Class N for Novice Car Engine cc 1st Gary Thomas 5E/2E - Argo JM22/Lotus Elise2000 146.88 2.74 0.00 18.06 0.00 16.60 18.53 0.00 16.19 19.00 17.83 18.86 19.00 0.00 19.00 16.49 14.88 2nd David Wood SC - Porsche Boxster/9933179/3747 RS 138.06 16.17 15.89 15.64 0.00 15.95 16.62 0.00 16.24 19.00 17.13 14.81 19.00 0.00 0.00 15.59 17.95 3rd David Greenwood2B - Westfield SE 1998 137.59 0.00 0.00 17.55 15.55 15.57 17.44 0.00 18.46 0.00 17.75 17.05 0.00 18.22 0.00 0.00 0.00 4th Mike Simpson 2B - Westfield SEi 1998 136.84 17.50 16.99 16.54 15.67 14.34 17.40 0.00 17.59 16.59 16.27 17.69 0.00 16.54 0.00 11.38 16.31 5th James Kerr 1B - Peugeot 205GTi 1905 135.84 0.00 15.40 16.44 16.17 16.61 0.00 0.00 18.01 16.39 16.27 0.00 0.00 17.78 18.17 0.00 0.00 6th Peter King 2A - Caterham Supersport1600 134.10 16.51 14.21 16.55 16.90 14.59 17.16 0.00 0.00 0.00 15.86 0.00 0.00 17.91 0.00 14.30 18.62 7th Paul Webb 1A - Daihatsu Charade 999T 128.72 13.80 0.00 15.26 0.00 0.00 16.21 0.00 0.00 16.34 13.38 19.00 16.15 0.00 14.84 13.47 17.12 8th Jeff Stokes 1C N Mitsubishi Evo 5 RS2000 128.45 16.03 15.72 16.20 0.00 0.00 0.00 0.00 0.00 16.73 14.20 0.00 19.00 15.22 0.00 15.35 0.00 9th Clifford Mould 5B - Jedi Mkvi 998 127.09 1.24 0.00 16.15 0.00 0.00 16.50 0.00 13.85 -
The Realanorak Quiz ANSWERS
The REAL Anorak Quiz ANSWERS Round 1:- Advertising Slogans No. Question Answer 1 Safety Fast MG 2 You can depend on An Austin it! 3 Hand built by robots Fiat (Strada) (as opposed to the Austin Ambassador, which was “Hand Built by Roberts” in the “Not the Nine o’Clock News”, sketch. See https://www.youtube.com/watc h?v=FU-tuY0Z7nQ ) 4 Everything we do is Ford driven by you No. Question Answer 5 Grace…. Space…. Jaguar Pace…. (It’s a shame they have forgotten the first one of these!) 6 The pioneer and still Morgan Runabout the best 7 The only car with its Wolseley name in lights (from its patented illuminated radiator badge) 8 Zoom, zoom, zoom Mazda 9 Made like a gun Royal Enfield (motorcycle) No. Question Answer 10 The power of dreams Honda 11 Takes your breath Peugeot away 12 The car in front is a Toyota 13 Sure as the sunrise Albion lorries (Should have been easy for Dire Straits fans. See “Border Riever”: https://www.youtube.com/watc h?v=Gi35yMzUuVg ) 14 Ugly is only skin Volkswagen (Beetle) deep 15 It’s a ….. honest Skoda No. Question Answer 16 The ultimate driving BMW machine 17 The silent sports car Bentley 18 As old as the Riley industry as modern as the hour 19 Vorsprung durch Audi Technik 20 The relentless Lexus pursuit of perfection Round 2:- Manufacturers’ Names No. Question Answer 1 The Latin for “I roll” Volvo (from the company’s origin as a subsidiary of SKF Bearings) 2 The founders name and an early hillclimb Aston-Martin location (Lionel Martin-Aston Clinton hillclimb) 3 Derived from the Norman, Fulk de Breant’s Vauxhall Hall, which gave its name to an area of London 4 The founder’s daughter Mercedes 5 Chemical symbol for Aluminium and the Alvis Latin for “Strong” (first made aluminium pistons) 6 A high level of achievement Standard 7 General Purpose Vehicle Jeep 8 The owner and his famous shell bearings Vanwall (Tony Vandervell/Thin wall bearings) 9 Named after a dealership in Oxford which MG sold tuned versions of cars made locally. -

Chapman Report
The Chapman Report Published by the Golden Gate Lotus Club www.gglotus.org February 2008 How Much for that Lotus in the Window? editor Are the prices of the used Lotus Elise dropping like Stockton real estate values? Well, no. Some owners appear to be in pure anxiety over some scenario like this, fearing they would have to sell their cars for pennies on the dollar. Well, some of us have through this before and want to say just relax. I shopped for my first Lotus, a used Elan, in 1965. I would stop by a Lotus dealership that was owned by a guy named Bob Challman about every day, as I lived in Re- dondo Beach and worked at LAX (LA Airport). I had been intro- Elan and Elise at the Laguna Track Day. duced to Lotus by the ads that were to give him anything on the Elan; created and paid for by Bob, and So what’s that Elan selling for didn’t want it. I told a friend in the placed in Car and Driver or Road today? About $15K, and that’s not SCCA about it and he bought it for and Track. His ads were the only even in perfect, restored condition less than $500. marketing for Lotus in the U.S., and for that price. PS: I tried to buy a So, that should have been about he was the car’s leading cheerlead- Seven from Bob Challman back the end of the Lotus Elan and Lotus er. He had to be, as Colin Chapman in ‘65. -

EDITION No. 57
EDITION JULY 2015 EDITION No. 57 LOTUS NEWS . THE LAST LOTUS SEVEN . THE KIWI REPLICA SEVENS - McGREGOR & FRASER . THE SUMMER OF 1973 . INDY 2015 THE OFFICIAL MAGAZINE OF CLUB LOTUS NZ Inc. and THE CLASSIC TRIAL REGISTER EDITION The Official Magazine of Club Lotus NZ Inc. and the Classic Trial Register Club Lotus NZ Inc. PO Box 100 869, North Shore Mail Centre, Auckland 0745 Web - www.clublotus.org.nz Facebook - Club Lotus NZ You Tube— Club Lotus New Zealand President Rex Oddy [email protected] Vice President David Crandall [email protected] Treasurer John McGregor Photo New Zealand Classic Car Magazine [email protected] Past President Robin Stevenson [email protected] From the Club Lotus 2015/16 Membership Cards. The ex Chris Atkinson Lotus 20/22 at Hampton Downs Motorsport Liaison Terry Riding [email protected] Social Media Rich Miles [email protected] General Committee Nigel Brock Steve Elliot Bay of Plenty Coordinator John Mallard [email protected] Wellington Coordinator Mark Gregory [email protected] Classic Trial Register PO Box 100 869, North Shore Mail Centre, Auckland 0745 Web - www.clublotus.org.nz/classictrial Classic Trial Director Ross Vaughan [email protected] Cover picture Treasurer Mark Gregory’s Elise David Tolhurst Image—Guy Allen General Committee www.guyallen.com John Miller Syd Davis Club Lotus NZ is a MotorSport Terry Riding New Zealand affiliated club EDITION Editorial Support — Rex Oddy Design—RTO Graphics 2 - EDITION No. 57 — JULY 2015 CLNZ Presidents Report Keeping life on the level Greetings In this EDITION we have a lot about Lotus Sevens. -

Lotus Seven Club
~\\ ~~ ,.,,;09, North H.oh .od '"'' '"' m<mb"' oo th< C\.,,;c L• "'"' tdp, photog,.ph by Aody """"'"" ~-~.u ------~---------------------- e PARTS FOR ALL SEVEN MODELS - 1957 TO DATE e RAPID MAIL ORDER SERVICE, VISA EXPORT ORDERS WELCOME - e ENGINE BUILDING, TUNING, NEW & EXCHANGE UNITS e TRANSMISSION, NEW & RECONDITIONED e SERVICING, REPAIRS & RESTORATIONS e ACCIDENT REPAIRS We are Agents or Stockists of most leading brands including: WEBER, K&N, SPAX, KENT Cams, VANDERVELL BEARINGS, MINILITE Wheels, WILLANS Seat Belts, NGK, TOP TEK HELMETS, 0/E LOTUS & CATERHAM Parts, MOTORCRAFT, LUCAS, Plus our range of REDLINE Accessories. For Spares, Repairs, Servicing or Free Advice Telephone or Visit our premises in Caterham. Only minutes from Junction 6, M25, Short walk from BR Station. HISTORIC SEVEN PARTS ~ SUPPLIERS ~ FACTORY APPOINTED PARTS & SERVICE CENTRE ~ IJ REDLIIIE ~ COMPONENTS TEL: {01883} 346515 FAX: (01883} 341604 ":«.LTD TIMBER HALL, 19 TIMBER LANE, CATERHAM, SURREY CR3 6LZ ENGLAND \\ s e v e n s Enthusiastic family business Parts and accessories available Old and new models maintained Lotus and Caterham 7 specialists Menu servicing or bespoke for your use Modifications or upgrades for road & track CONTINUOUS SEVEN 1977-2007 SERVICE FOR THIRTY YEARS Caterham Approved Fireblade Parts I www.jameswhiting.com Appletree Works, 26-30 Glenfield Rd, Ashford, Middx TW I 5 IJL t) +44 (0) 1784 241466 f) +44 (0) 1784 25091 5 ....VI Club administration and membership services VI ·::;;rtl including Event Support Vehicle (ESV) bookings, Calendar :::l coordination and advertising in Lowflying ..c ....c <l) Sam Pearce• c Lotus Seven Club, PO Box 7, Abergavenny NP7 5WQ <l) e: [email protected] > <l) t: +44 (0)1873 736356 f: +44 (0)1873 858717 V) E for membership enquiries or changes of address, contact: rtl e: memsec@lotus7clu b.com, or Sa m at the address above ..c,_ or you can download a membership form from the Club website <l) ... -
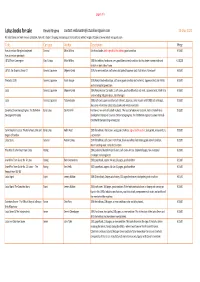
Lotus Books for Sale Ronald Ringma Contact: [email protected] 20 May 2021 All Listed Items Are from My Own Collection, I Am Not a Dealer
page 1 of 6 Lotus books for sale Ronald Ringma contact: [email protected] 20 May 2021 All listed items are from my own collection, I am not a dealer. Shipping and packing at real cost to be added. Images of books at www.lotusdriversguide.com Title Car type Author Description Price How to restore fibreglass bodywork General Miles Wilkins Set of two books, both signed by the author, good condition € 50,00 How to restore paintwork LOTUS Twin-Cam engine Elan, Europa Miles Wilkins 1988 first edition, hard cover, very good (almost new) condition but has dealer stamp inside and € 100,00 scratch on back side of cover LOTUS: Car Graphic Library 17 General, Japanese Shigemi Kanda 1976, As new condition, soft cover, dust jacket, Japanese text, illustrations. Rare book! € 80,00 The Lotus 1978 General, Japanese Koichi Inouye 1978, Neko Creative Boutique, soft cover, good condition but not mint, Japanese tekst, Mark VI to € 60,00 and including 3rd generation Lotus General, Japanese Shigemi Kanda 1984, Neko Historic Car Books 1, soft cover, good condition but not mint, Japanese tekst, Mark VI to € 50,00 and including 3rd generation , lots of images Lotus General, Japanese Tatsuro Sasaki 1980, soft cover, good condition but not mint, Japanese, Lotus models untill 1980, lots of images, € 50,00 also some information about Lotus books and miniature models Coventry Climax Racing Engines: The Definitive Early Lotus Des Hammill Hardcover, new and still sealed in plastic. The result of extensive research, here is the definitive € 65,00 Development History development history of Coventry Climax racing engines: the first British engines to power Formula One World Championship-winning cars.