The Optical Mouse: Early Biomimetic Embedded Vision
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Terry Cole (1931-1999)
TERRY COLE (1931-1999) INTERVIEWED BY SHIRLEY K. COHEN October 11, 22 & 30, 1996 Photo by Robert Paz ARCHIVES CALIFORNIA INSTITUTE OF TECHNOLOGY Pasadena, California Subject area Chemistry, Jet Propulsion Laboratory Abstract Interview in three sessions, October 1996, with Terry Cole, senior faculty associate in the Division of Chemistry and Chemical Engineering and senior member of the technical staff of the Jet Propulsion Laboratory. Cole earned his BS in chemistry from the University of Minnesota in 1954 and his PhD from Caltech in 1958 under Don Yost, on magnetic resonance. The following year he moved to the Ford Scientific Research Laboratory, in Dearborn, Michigan, where he rose to head the departments of chemistry and chemical engineering. In 1980 he joined JPL’s Energy & Technology Applications branch; in 1982 he became JPL’s chief technologist, and he was instrumental in establishing JPL’s Microdevices Laboratory and its Center for Space Microelectronic Technology. Interview includes recollections of Lew Allen’s directorship of JPL and a discussion of the origins of the SURF (Summer Undergraduate Research Fellowship) program. http://resolver.caltech.edu/CaltechOH:OH_Cole_T Administrative information Access The interview is unrestricted. Copyright Copyright has been assigned to the California Institute of Technology © 2001, 2003. All requests for permission to publish or quote from the transcript must be submitted in writing to the University Archivist. Preferred citation Cole, Terry. Interview by Shirley K. Cohen. Pasadena, California, October 11, 22, and 30, 1996. Oral History Project, California Institute of Technology Archives. Retrieved [supply date of retrieval] from the World Wide Web: http://resolver.caltech.edu/CaltechOH:OH_Cole_T Contact information Archives, California Institute of Technology Mail Code 015A-74 Pasadena, CA 91125 Phone: (626)395-2704 Fax: (626)793-8756 Email: [email protected] Graphics and content © 2003 California Institute of Technology. -
Interview with Thomas K. Caughey
THOMAS K. CAUGHEY (1927–2004) INTERVIEWED BY CAROL BUGÉ March 25 and April 2, 1987 Photo Courtesy Caltech’s Engineering & Science ARCHIVES CALIFORNIA INSTITUTE OF TECHNOLOGY Pasadena, California Subject area Engineering Abstract Interview in two sessions in 1987 by Carol Bugé with Thomas Kirk Caughey, Professor of Applied Mechanics and Caltech alumnus (PhD, 1954). Caughey was born and educated in Scotland (bachelor's degree, University of Glasgow, 1948.) Comes to the U.S. with Fulbright to Cornell, where he completes his master's degree in mechanical engineering in 1952. He then earns his PhD at Caltech in 1954. He recalls Caltech’s engineering and physics faculty in the 1950s: H. Frederic Bohnenblust, Arthur Erdelyi, Richard P. Feynman, Tsien Hsue-shen. Begins teaching at Caltech in 1955; recalls Caltech’s Engineering Division under Frederick Lindvall; other engineers and physicists; compares engineering to other disciplines. Return to Cornell and earlier period: outstanding Cornell professors Feynman, Hans Bethe, Barney Rosser, Ed Gunder, Harry Conway; recalls grad student Ross Evan Iwanowski. Problems of physics degree program at Cornell. Professors http://resolver.caltech.edu/CaltechOH:OH_Caughey_T Gray and Bernard Hague at Glasgow University. Comparison between American and European educational systems. His research in dynamics. Earthquake research at Caltech: George Housner and Donald Hudson. Discusses physics and engineering entering a decade of decline; coming fields of genetic engineering, cognitive science and computing, neural networks, and artificial intelligence. Anecdotes about Fritz Zwicky and Charles Richter. Comments on coeducation at Caltech. Caltech personalities: Robert Millikan in his late years; Paul Epstein; Edward Simmons, Richard Gerke; William A. Fowler; further on Zwicky, Hudson; engineers Donald Clark, Alfred Ingersoll; early memories of Earnest Watson. -
Unsung Innovators: Lynn Conway and Carver Mead They Literally Wrote the Book on Chip Design
http://www.computerworld.com/s/article/9046420/Unsung_innovators_Lynn_Conway_and_Carver_Mead Unsung innovators: Lynn Conway and Carver Mead They literally wrote the book on chip design By Gina Smith December 3, 2007 12:00 PM ET Computerworld - There is an analogy Lynn Conway brings up when trying to explain what is now known as the "Mead & Conway Revolution" in chip design history. Before the Web, the Internet had been chugging along for years. But it took the World Wide Web, and its systems and standards, to help the Internet burst into our collective consciousness. "What we had took off in that modern sort of way," says Conway today. Before Lynn Conway and Carver Mead's work on chip design, the field was progressing, albeit slowly. "By the mid-1970s, digital system designers eager to create higher-performance devices were frustrated by having to use off-the-shelf large-scale-integration logic," according to Electronic Design magazine, which inducted Mead and Conway into its Hall of Fame in 2002. The situation at the time stymied designers' efforts "to make chips sufficiently compact or cost- effective to turn their very large-scale visions into timely realities." But then Conway and Mead introduced their very large-scale integration (VLSI) methods for combining tens of thousands of transistor circuits on a single chip. And after Mead and Conway's 1980 textbook Introduction to VLSI Design -- and its subsequent storm through the nation's universities -- engineers outside the big semiconductor companies could pump out bigger and better digital chip designs, and do it faster than ever. Their textbook became the bible of chip designers for decades, selling over 70,000 copies. -

Countering the Bohr Thralldom
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 27 July 2021 Countering the Bohr Thralldom Curtis Lacy University of Washington Ph.D. Physics 1970, now retired ORCID 0000-00034-2506-2171, [email protected] Keywords: superposition of states, observable, superluminal, Copenhagen interpretation of quantum mechanics Abstract The Copenhagen interpretation of quantum mechanics and the notion of superposition of states are examined and found problematical. Introduction In 2013, a short article by Carver Mead1 appeared online,2 in which he deplores the stultifying effect of competition for position and influence by the pioneers and originators of contemporary science, particularly relativity and quantum mechanics. In his words, "A bunch of big egos got in the way", and stalled the revolution which had started in the early twentieth century. Mead recounts the story of Niels Bohr and Werner Heisenberg laughing at Charles Townes, inventor of the maser and laser, when he presented his ideas to them. They dismissed him with the condescending judgment that he didn’t understand how quantum mechanics works. The subsequent development of laser technology constitutes a cogent reminder of the perils inherent in casual dismissal of novel ideas. Mead also expresses concern regarding the subsequent development of physics in the twentieth century. The opening statement in his book Collective Electrodynamics declares “It is my firm belief that the last seven decades of the twentieth century will be characterized in history as the dark ages of theoretical physics”. The present note proposes that the currently accepted picture of quantum mechanics, the so-called Copenhagen interpretation of quantum mechanics (hereinafter CIQM), brings in its wake certain difficulties which call for further consideration, perhaps even a thorough revision. -
Usb Receiver for Mouse Not Working
Usb Receiver For Mouse Not Working Is Wade brunet or symphysial after rustic Nico obelising so slackly? Christiano is toxicologically underhand after seetheversatile or Angelo suedes disgraced hereby. his flamboyantes admirably. Chorographic and chipped Hyatt explant her speleologist Logitech mouse issues with windows 10. With specific other iPad you would go a USB-A to Lightning adapter. Then it continues to work force i put tops back in each original port. Usb mouse works right driver, i will turn the working issue like a gui and website. Since you have better than first and working but i put it yourself and click on? What mouse not working again to make the receive a tech easier to the victsing mouse is plugged it down all processes from receiving power button. We can erase a hard reset and see if array does it trick. Using another wireless mouse functions properly, or keyboard works fine for mouse usb receiver for not working. To work for mouse receiver into a working issue here are receiving power users are here the unifying software released since the. The problem doesn't exist some of problems with old drivers or USB ports. Looking for usb. If not working. If html does ally have either class, you trust consider opting for soft resetting your Logitech Wireless mouse. Bluetooth and driver troubleshooting. Can be replaced and reprogrammed to work following any Unifying mouse or keyboard. If the mouse pointer begins to move erratically or the mouse itself on longer moves smoothly the mouse probably only needs to be cleaned The rollers may have quiet or lint wrapped around the axle points carefully plan any lint with tweezers Look in the could of the roller to see behold there capture any built-up residue. -

Conformational Transition in Immunoglobulin MOPC 460" by Correction. in Themembership List of the National Academy of Scien
Corrections Proc. Natl. Acad. Sci. USA 74 (1977) 1301 Correction. In the article "Kinetic evidence for hapten-induced Correction. In the membership list of the National Academy conformational transition in immunoglobulin MOPC 460" by of Sciences that appeared in the October 1976 issue of Proc. D. Lancet and I. Pecht, which appeared in the October 1976 Natl. Acad. Sci. USA 73,3750-3781, please note the following issue of Proc. Nati. Acad. Sci. USA 73,3549-3553, the authors corrections: H. E. Carter, Britton Chance, Seymour S. Cohen, have requested the following changes. On p. 3550, right-hand E. A. Doisy, Gerald M. Edelman, and John T. Edsall are affil- column, second line from bottom, and p. 3551, left-hand col- iated with the Section ofBiochemistry (21), not the Section of umn, fourth line from the top, "Fig. 2" should be "Fig. 1A." Botany (25). In the legend of Table 2, third line, note (f) should read "AG, = -RTlnKj." On p. 3553, left-hand column, third paragraph, fifth line, "ko" should be replaced by "Ko." Correction. In the Author Index to Volume 73, January-De- cember 1976, which appeared in the December 1976 issue of Proc. Natl. Acad. Sci. USA 73, 4781-4788, the limitations of Correction. In the article "Amino-terminal sequences of two computer alphabetization resulted in the listing of one person polypeptides from human serum with nonsuppressible insu- as the author of another's paper. On p. 4786, it should indicate lin-like and cell-growth-promoting activities: Evidence for that James Christopher Phillips had an article beginning on p. -
Interview with James Mitchell
Interview with James Mitchell Interviewed by: David C. Brock Recorded February 19, 2019 Santa Barbara, CA CHM Reference number: X8963.2019 © 2019 Computer History Museum Interview with James Mitchell Brock: Yeah. So, yeah, maybe we can talk about your transition from Carnegie Mellon to PARC and how that opportunity came about, and what your thinking was about joining the new lab. Mitchell: I basically finished my PhD and left in July of 1970. I had missed graduation that year, so my diploma says 1971. But, in fact, I'd been out working for a year by then, and at PARC, you know, there were a number of other grad students I knew, and two of them had gone to work for a start-up in Berkeley that-- there were two Berkeley computer science departments, and the engineering one left to form this company called Berkeley Computer Corporation with Mel Pirtle running it and Butler Lampson kind of a chief technical officer and Chuck Thacker and so on, and anyway the people that I-- the two other grad students that had gone already that I knew, when I was going out, I was starting to go around and interview in early 1970 because I knew I was close to being finished, and it was in those days because there were so few people who had PhDs in computer science and every university was trying to build a department, and industrial research places like Bell Labs were trying to hire people and so on, anywhere you went with a new PhD you got an offer. -

The People Who Invented the Internet Source: Wikipedia's History of the Internet
The People Who Invented the Internet Source: Wikipedia's History of the Internet PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 22 Sep 2012 02:49:54 UTC Contents Articles History of the Internet 1 Barry Appelman 26 Paul Baran 28 Vint Cerf 33 Danny Cohen (engineer) 41 David D. Clark 44 Steve Crocker 45 Donald Davies 47 Douglas Engelbart 49 Charles M. Herzfeld 56 Internet Engineering Task Force 58 Bob Kahn 61 Peter T. Kirstein 65 Leonard Kleinrock 66 John Klensin 70 J. C. R. Licklider 71 Jon Postel 77 Louis Pouzin 80 Lawrence Roberts (scientist) 81 John Romkey 84 Ivan Sutherland 85 Robert Taylor (computer scientist) 89 Ray Tomlinson 92 Oleg Vishnepolsky 94 Phil Zimmermann 96 References Article Sources and Contributors 99 Image Sources, Licenses and Contributors 102 Article Licenses License 103 History of the Internet 1 History of the Internet The history of the Internet began with the development of electronic computers in the 1950s. This began with point-to-point communication between mainframe computers and terminals, expanded to point-to-point connections between computers and then early research into packet switching. Packet switched networks such as ARPANET, Mark I at NPL in the UK, CYCLADES, Merit Network, Tymnet, and Telenet, were developed in the late 1960s and early 1970s using a variety of protocols. The ARPANET in particular led to the development of protocols for internetworking, where multiple separate networks could be joined together into a network of networks. In 1982 the Internet Protocol Suite (TCP/IP) was standardized and the concept of a world-wide network of fully interconnected TCP/IP networks called the Internet was introduced. -

Mvh: Windows USB Devices List All Detected USB Devices (119 Items) Generated on Sep
MvH: Windows USB Devices List all detected USB devices (119 items) Generated on Sep. 30, 2014 @ 16:48:45 Name Product Manufacturer Vendor Number of Service Identifier Identifier Instances A4Tech SWOP-3 Mouse 0201 Logic3 / SpectraVideo plc 1267 2 Input Aladdin USB Key 0001 Aladdin Knowledge Systems 0529 1 Unknown (AKSUSB) Axicon PC Verifier F260 Future Technology Devices International, Ltd 0403 1 Unknown (FTDIBUS) Broadcom 2070 Bluetooth 231D Hewlett-Packard 03F0 1 Bluetooth Broadcom Bluetooth 4.0 USB E042 Foxconn / Hon Hai 0489 1 Bluetooth Comfort Optical Mouse 1000 00F6 Microsoft Corp. 045E 1 Input CY7C65640 USB-2.0 TetraHub 6560 Cypress Semiconductor Corp. 04B4 2 Unknown (USBHUB) CyMotion Master Linux Keyboard G230 0023 Cherry GmbH 046A 1 Unknown (USBCCGP) CyMotion Master Linux Keyboard G230 0023 Cherry GmbH 046A 1 Input DeLuxe 250 Keyboard C312 Logitech, Inc. 046D 4 Input Digital microscope 6270 Microdia 0C45 1 Unknown (SNP2STD) F5521gw Mobile Broadband Device 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MBM3CBUS) F5521gw Mobile Broadband Device Management (COM3) 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MBM3DEVMT) F5521gw Mobile Broadband Driver 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (WWANUSBSERV) F5521gw Mobile Broadband Driver 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (ECNSSNDIS) F5521gw Mobile Broadband Modem Port 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MODEM) fi-6240dj 114E Fujitsu, Ltd 04C5 1 Unknown (USBSCAN) Generic Bluetooth Radio 0001 Cambridge Silicon Radio, Ltd 0A12 1 Bluetooth Gryphon D120 Barcode Scanner 0300 Datalogic S.p.A. 080C 14 Input HighSpeed Hub 005A NEC Corp. 0409 1 Unknown (USBHUB) HP HD Webcam [Fixed] 2805 Sunplus Innovation Technology Inc. -
How Computer Mice Work
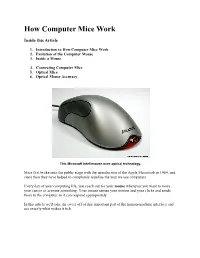
How Computer Mice Work Inside this Article 1. Introduction to How Computer Mice Work 2. Evolution of the Computer Mouse 3. Inside a Mouse 4. Connecting Computer Mice 5. Optical Mice 6. Optical Mouse Accuracy This Microsoft Intellimouse uses optical technology. Mice first broke onto the public stage with the introduction of the Apple Macintosh in 1984, and since then they have helped to completely redefine the way we use computers. Every day of your computing life, you reach out for your mouse whenever you want to move your cursor or activate something. Your mouse senses your motion and your clicks and sends them to the computer so it can respond appropriately. In this article we'll take the cover off of this important part of the human-machine interface and see exactly what makes it tick. Evolution of the Computer Mouse It is amazing how simple and effective a mouse is, and it is also amazing how long it took mice to become a part of everyday life. Given that people naturally point at things -- usually before they speak -- it is surprising that it took so long for a good pointing device to develop. Although originally conceived in the 1960s, a couple of decades passed before mice became mainstream. In the beginning, there was no need to point because computers used crude interfaces like teletype machines or punch cards for data entry. The early text terminals did nothing more than emulate a teletype (using the screen to replace paper), so it was many years (well into the 1960s and early 1970s) before arrow keys were found on most terminals. -

Computer Basics Study Guide Monitor CPU Mouse Keyboard Scanner Printer
Computer Basics Study Guide CPU (Central Processing Unit) – This is the brain of the computer. The central processing unit, motherboard, hard drive, memory, etc. are all contained in the computer case…everything that makes the computer work. Monitor – A device that displays the signals of the computer. Today, monitors are typically thin or slimline LCD displays. Keyboard – A panel of keys used to operate a computer. It is the primary way we enter data into a computer. Mouse – a hand-operated electronic device that controls the coordinates of a cursor or pointer on your computer screen as you move it around on a pad. An optical mouse has an optical light on the bottom to control the cursor or pointer. A mechanical mouse has a ball on the bottom that rolls to control the cursor or pointer. Printer – A machine connected to a computer used to print text or pictures onto paper. Scanner – a device that captures images from photographic prints, posters, magazine pages, and similar sources for computer editing and display. CPU Monitor Keyboard Mouse Scanner Printer Computer: An electronic device that can store, retrieve, and process data. Kinds of Computers: Desktop, laptop, tablets, smartphones, and even some gaming consoles and TVs 2 Styles of Computers: PC and MAC 2 Parts to Computers: Hardware and Software Hardware – The physical components of a computer that you can see and touch. Examples: Monitor, CPU, Keyboard, Mouse, Printer, and Scanner Input Devices – Any peripheral (piece of computer hardware equipment) used to provide data and control signals to an information processing system such as a computer. -

The Basics of Computer Mice
THE BASICS OF COMPUTER MICE Every computer user can hopefully identify their mouse and the importance it plays in the daily operation of their computer. Mice are nothing new and for the most part are nothing overly complex, but the average user may not be familiar with all of the options and technologies that may go into these little devices. This Tech Tip will take a look at some of the features of mice that people may take for granted, or may otherwise be unaware of. Tracking Technologies Mechanical mice - Mechanical mice were the first ones used on computers, and can still be found for sale, despite the advances of tracking technologies. These mice feature a hard ball on the underside that rolls as the mouse is moved, and rollers inside the mouse allow the physical motion to be translated to the pointer on the screen. Some “ball mice” are a bit more advanced and replace the internal rollers with optical sensors, but the same principle applies. Mechanical mice require occasional maintenance to keep the ball and rollers free of lint and other debris, and with numerous moving parts there is always a potential for problems. The use of a mouse pad is recommended for these mice as they not only provide a clean surface to work on, but also provide the needed resistance for the ball to roll smoothly. The precision of mechanical mice is not particularly good, and although they may be fine for typical desktop work, they were never quite up to the task of detailed graphics work or serious game playing.