Design Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Future of Human-Computer Interaction: Overview of Input Devices
The future of human-computer interaction: overview of input devices Fabrizio Fornari School of Computer Science H´ask´olinn´ıReykjav´ık- Reykjav´ıkUniversity Reykjav´ık,Iceland November, 2012 Abstract We are in 2012 and we are still using the mouse and the keyboard to interact with a computer. We have seen a lot of changes in the world of Computer Science, relating to: performance, design and the way we interact with the computer. Differ- ent input devices have been developed around the computer, starting from the most recent touchscreens, continuing with webcams, microphones, and arriving to the oldest mice and keyboards. The aim of this research is to let the reader imagine a new way to interact with the computer. To reach our purpose, we introduce advanced technologies such as: Speech and Voice Recognition, Electronic Perception, Eye Tracking and Brain Computer In- terfaces. We propose examples of the cited technologies that may change the paradigm that saw, until now, keyboard and mouse as leaders of the input devices. 1 1 Introduction From the computer's birth1, we saw a lot of changes in the world of Com- puter Science. Changes relating to: performance, design and human-computer interaction [49]. A few years ago, the words \input device" evoked in our mind only two specific objects: the keyboard and the mouse - the main instruments used to provide data to a personal computer. Keyboard and mouse are, in fact, two of the first input devices in the history of computer. Nowadays, with the evolution of computers, we have a large set of input de- vices that changed the way we interact with the computer. -
Orbit Reader 20™ User Guide
PROPRIETARY INFORMATION Orbit Reader 20™ User Guide 17th April, 2019 Version 2.5 Orbit Reader 20 – User guide Version 2.5 Contents 1 INTRODUCTION ------------------------------------------------------------------------------------------------ 5 2 HOW THE ORBIT READER 20 IS USED ---------------------------------------------------------------- 5 2.1 STAND-ALONE MODE ------------------------------------------------------------------------------------- 5 2.2 REMOTE MODE--------------------------------------------------------------------------------------------- 6 3 TRANSCRIBED BRAILLE ----------------------------------------------------------------------------------- 6 4 AUTOMATIC TRANSLATION------------------------------------------------------------------------------- 6 5 TRANSLATE BRAILLE --------------------------------------------------------------------------------------- 7 6 DOCUMENTATION CONVENTIONS --------------------------------------------------------------------- 7 7 IN THE BOX ----------------------------------------------------------------------------------------------------- 8 8 FEATURES ------------------------------------------------------------------------------------------------------ 8 9 ORIENTATION -------------------------------------------------------------------------------------------------- 8 9.1 KEY PLACEMENTS AND USE ----------------------------------------------------------------------------- 9 9.2 PANNING KEYS ------------------------------------------------------------------------------------------- 10 9.3 -

Siouxland Fabricating Inc.: Windows USB Devices List All Detected USB Devices (56 Items) Generated on Oct 02, 2014 @ 08:28 Am
Siouxland Fabricating Inc.: Windows USB Devices List all detected USB devices (56 items) Generated on Oct 02, 2014 @ 08:28 am Name Product Identifier Manufacturer Vendor Identifier Number of Instances Service 3Dconnexion Space Pilot 3D Mouse C625 Logitech, Inc. 046D 1 Input 3Dconnexion SpacePilot PRO C629 Logitech, Inc. 046D 1 Unknown (LGPBTDD) 3Dconnexion SpacePilot Pro 3D Mouse C629 Logitech, Inc. 046D 1 Input ActiveJet K-2024 Multimedia Keyboard 0103 Elan Microelectronics Corp. 04F3 1 Input ASIX AX88772 USB2.0 to Fast Ethernet Adapter 7720 ASIX Electronics Corp. 0B95 1 Unknown (AX88772) Audio Adapter 000C C-Media Electronics, Inc. 0D8C 1 Input Bar Code Scanner 1200 Symbol Technologies 05E0 9 Input Basic Optical Mouse v2.0 00CB Microsoft Corp. 045E 1 Input Benq X120 Internet Keyboard Pro 001C Darfon Electronics Corp. 0D62 2 Input C-Media USB Headphone Set 000C C-Media Electronics, Inc. 0D8C 1 Audio Comfort Curve Keyboard 2000 V1.0 00DD Microsoft Corp. 045E 1 Input Cordless Mouse Receiver C50E Logitech, Inc. 046D 2 Input Cordless Mouse Receiver C521 Logitech, Inc. 046D 1 Input Dell N889 Optical Mouse 4D81 Primax Electronics, Ltd 0461 1 Input Intel(R) Centrino(R) Wireless Bluetooth(R) 3.0 + High Speed Adapter 0189 Intel Corp. 8086 1 Bluetooth Keyboard 2003 Dell Computer Corp. 413C 3 Input Keyboard 2010 Dell Computer Corp. 413C 1 Input Keyboard K120 for Business C31C Logitech, Inc. 046D 1 Input Laptop Integrated Webcam 63E0 Microdia 0C45 1 Unknown (OEM13VID) Logitech Unifying USB receiver C52B Logitech, Inc. 046D 1 Unknown (LEQDUSB) M-BT96a Pilot Optical Mouse C03D Logitech, Inc. 046D 1 Input Microsoft USB Wheel Mouse Optical 0040 Microsoft Corp. -

A Unified Toolkit for Accessing Human Interface Devices in Pure Data And
Proceedings of the 2007 Conference on New Interfaces for Musical Expression (NIME07), New York, NY, USA A Unified Toolkit for Accessing Human Interface Devices in Pure Data and Max/MSP Hans-Christoph Steiner David Merrill Olaf Matthes IDMI/Polytechnic University MIT Media Lab nullmedium Brooklyn, NY, USA Cambridge, MA, USA Greifswald, Germany [email protected] [email protected] [email protected] ABSTRACT For an electronic musical instrument designer, easy ac- In this paper we discuss our progress on the HID toolkit, cess to gestural data (motion, pressure, buttonpresses, etc.) a collection of software modules for the Pure Data and and output capabilities (lights, force feedback) enables rapid Max/MSP programming environments that provide unified, prototyping of musical affordances and mapping strategies. user-friendly and cross-platform access to human interface Many HIDs are temporally and gesturally sensitive enough devices (HIDs) such as joysticks, digitizer tablets, and for musical performance, including gaming mice, certain joy- stomp-pads. These HIDs are ubiquitous, inexpensive and sticks, and most graphics tablets. Another factor that makes capable of sensing a wide range of human gesture, making many existing HIDs appealing for electronic music perfor- them appealing interfaces for interactive media control. mances is that they are relatively familiar objects (as com- However, it is difficult to utilize many of these devices for pared to custom electronic hardware), which can allow an custom-made applications, particularly for novices. The audience to more easily understand the connection between modules we discuss in this paper are [hidio] 1, which a performer’s actions and the resulting sonic output. -

RX Family USB Host Human Interface Device Class Driver for USB Mini Firmware Using Firmware Integration Technology Contents
APPLICATION NOTE R01AN2168EJ0120 RX Family Rev.1.20 Jun 1, 2020 USB Host Human Interface Device Class Driver for USB Mini Firmware Using Firmware Integration Technology Introduction This application note describes USB Host Human Interface Device Class Driver (HHID), which utilizes Firmware Integration Technology (FIT). This module operates in combination with the USB Basic Mini Host and Peripheral Driver. It is referred to below as the USB HHID FIT module. Target Device RX111 Group RX113 Group RX231 Group RX23W Group When using this application note with other Renesas MCUs, careful evaluation is recommended after making modifications to comply with the alternate MCU. Related Documents 1. Universal Serial Bus Revision 2.0 specification http://www.usb.org/developers/docs/ 2. USB Class Definitions for Human Interface Devices Version 1.1 3. HID Usage Tables Version 1.1 http://www.usb.org/developers/docs/ 4. RX111 Group User’s Manual: Hardware (Document number .R01UH0365) 5. RX113 Group User’s Manual: Hardware (Document number.R01UH0448) 6. RX231 Group User’s Manual: Hardware (Document number .R01UH0496) 7. RX23W Group User’s Manual: Hardware (Document number .R01UH0823) 8. USB Basic Mini Host and Peripheral Driver (USB Mini Firmware) using Firmware Integration Technology Application Note (Document number.R01AN2166) • Renesas Electronics Website http://www.renesas.com/ • USB Devices Page http://www.renesas.com/prod/usb/ R01AN2168EJ0120 Rev.1.20 Page 1 of 17 Jun 1, 2020 RX Family USB Host Human Interface Device Class Driver for USB Mini Firmware -

USB Human Interface Device Class on an Embedded Host
AN1144 USB Human Interface Device Class on an Embedded Host Author: Amardeep Gupta The class, subclass and protocol designators for an HID bDeviceClass Microchip Technology Inc. device are not contained in the , bDeviceSubClass and bDeviceProtocol fields of the device descriptor. Instead, these fields are all set to INTRODUCTION 0x00 and the designators are specified in the bInterfaceClass, bInterfaceSubClass and With the introduction of Microchip’s microcontrollers with bInterfaceProtocol fields of the interface the USB OTG peripheral, microcontroller applications descriptor. The most common configurations for HID can easily support USB embedded host functionality. class devices are: Traditionally, the PC is used as a host in an USB network. Now, with Microchip’s microcontroller with host capability, • bInterfaceClass – the host can be implemented in an embedded system. 0x03 (HID Class) Some of the most common uses of this capability are to bInterfaceSubClass interface to Human Interface Devices (HIDs). • – 0x00 (No Subclass) USB HUMAN INTERFACE DEVICE 0x01 (Boot Interface Subclass) (HID) CLASS 0x02-0xFF (Reserved) Overview • bInterfaceProtocol – The HID class primarily consists of devices that are 0x00 (None) used to control any particular application. 0x01 (Keyboard) Typical examples of HID class devices include: 0x02 (Mouse) • Keyboard and pointing devices 0x03-0xFF (Reserved) • Control switches, sliders and so on A host communicates with the HID class device using • Joystick, steering and other gaming control inputs either the control (default) pipe or an interrupt pipe. • Point-of-sale bar code scanners and magnetic card The control pipe is used for: readers having an HID Keyboard Emulation mode • Sending and receiving the control transfer data. The HID class can be used for devices without human interface, too; such applications just need to be able to • Transmitting and receiving reports if the interrupt function within the limits of the HID class specifications. -

(12) Patent Application Publication (10) Pub. No.: US 2007/0208949 A1 Lu Et Al
US 20070208949A1 (19) United States (12) Patent Application Publication (10) Pub. No.: US 2007/0208949 A1 Lu et al. (43) Pub. Date: Sep. 6, 2007 (54) INFORMATION SECURITY DEVICE OF Publication Classification UNIVERSAL SERAL BUS HUMAN (51) Int. Cl. INTERFACE DEVICE CLASS AND DATA H04LK LM00 (2006.01) TRANSMISSION METHOD FOR SAME (52) U.S. Cl. ....................................................... 713/186 (75) Inventors: Zhou Lu, Beijing (CN); (57) ABSTRACT Huazhang Yu, Beijing (CN) The present invention relates to an information security device of Universal Serial Bus (USB) Human Interface Correspondence Address: Device (HID) class and the data transmission method for the Richard L. Wood same. With a master chip that has a built-in HID descriptor and a USB interface chip connected to the master chip, the 22nd Floor, 120 South Riverside Plaza device of the present invention itself may be designed to be Chicago, IL 60606-3945 compact and easy to use, and provide powerful functions. With the USB HID interface, the device user does not need (73) Assignee: Feitian Technologies, Co., Ltd, to install a driver and the user can use the device anywhere Beijing (CN) and anytime. And the user does not need to manage the driver whose version updates constantly, consider the com patibility of various product drivers, face the risk caused by (21) Appl. No.: 111534,991 the driver when running OS, and worry about the pollution to the system resulted from the installation and uninstalla (22) Filed: Sep. 25, 2006 tion of the driver. CPU, SCM or smart card chip used as the master chip ensures that the security of identity authentica Foreign Application Priority Data tion is reliable. -

Usbcheckin: Preventing Badusb Attacks by Forcing Human-Device Interaction
USBCheckIn: Preventing BadUSB Attacks by Forcing Human-Device Interaction Federico Griscioli∗, Maurizio Pizzonia∗ and Marco Sacchetti∗ ∗Roma Tre University, Department of Engineering Via della Vasca Navale 79, 00146 Rome, Italy fgriscioli,[email protected] [email protected] GoodUSB [3] is a software solution that aims at protecting Abstract—The BadUSB attack leverages the modification of the host against BadUSB attacks. When a new USB device is firmware of USB devices in order to mimic the behaviour of a attached, a message is shown to the user, which must declare keyboard or a mouse and send malicious commands to the host. This is a new and dreadful threat for any organization. Current his/her expectation about the functionalities of the device. countermeasures either require special USB devices or ask the In this paper we present USBCheckIn, an hardware solution user to decide if the device can be used. that is able to protect any kind of USB host against attacks We propose a new approach that, before allowing the device from devices that claim to be human interface devices but are to be used, forces the user to interact with it physically, to not. The basic idea is that the authenticity of a real human ensure that a real human-interface device is attached. Our implementation is hardware-based and, hence, can be used with interface device can be easily checked by asking the user to any host, comprising embedded devices, and also during boot, use it. To authorize a human intreface device to connect to i.e., before any operating system is running. -
Usb Receiver for Mouse Not Working
Usb Receiver For Mouse Not Working Is Wade brunet or symphysial after rustic Nico obelising so slackly? Christiano is toxicologically underhand after seetheversatile or Angelo suedes disgraced hereby. his flamboyantes admirably. Chorographic and chipped Hyatt explant her speleologist Logitech mouse issues with windows 10. With specific other iPad you would go a USB-A to Lightning adapter. Then it continues to work force i put tops back in each original port. Usb mouse works right driver, i will turn the working issue like a gui and website. Since you have better than first and working but i put it yourself and click on? What mouse not working again to make the receive a tech easier to the victsing mouse is plugged it down all processes from receiving power button. We can erase a hard reset and see if array does it trick. Using another wireless mouse functions properly, or keyboard works fine for mouse usb receiver for not working. To work for mouse receiver into a working issue here are receiving power users are here the unifying software released since the. The problem doesn't exist some of problems with old drivers or USB ports. Looking for usb. If not working. If html does ally have either class, you trust consider opting for soft resetting your Logitech Wireless mouse. Bluetooth and driver troubleshooting. Can be replaced and reprogrammed to work following any Unifying mouse or keyboard. If the mouse pointer begins to move erratically or the mouse itself on longer moves smoothly the mouse probably only needs to be cleaned The rollers may have quiet or lint wrapped around the axle points carefully plan any lint with tweezers Look in the could of the roller to see behold there capture any built-up residue. -

Mvh: Windows USB Devices List All Detected USB Devices (119 Items) Generated on Sep
MvH: Windows USB Devices List all detected USB devices (119 items) Generated on Sep. 30, 2014 @ 16:48:45 Name Product Manufacturer Vendor Number of Service Identifier Identifier Instances A4Tech SWOP-3 Mouse 0201 Logic3 / SpectraVideo plc 1267 2 Input Aladdin USB Key 0001 Aladdin Knowledge Systems 0529 1 Unknown (AKSUSB) Axicon PC Verifier F260 Future Technology Devices International, Ltd 0403 1 Unknown (FTDIBUS) Broadcom 2070 Bluetooth 231D Hewlett-Packard 03F0 1 Bluetooth Broadcom Bluetooth 4.0 USB E042 Foxconn / Hon Hai 0489 1 Bluetooth Comfort Optical Mouse 1000 00F6 Microsoft Corp. 045E 1 Input CY7C65640 USB-2.0 TetraHub 6560 Cypress Semiconductor Corp. 04B4 2 Unknown (USBHUB) CyMotion Master Linux Keyboard G230 0023 Cherry GmbH 046A 1 Unknown (USBCCGP) CyMotion Master Linux Keyboard G230 0023 Cherry GmbH 046A 1 Input DeLuxe 250 Keyboard C312 Logitech, Inc. 046D 4 Input Digital microscope 6270 Microdia 0C45 1 Unknown (SNP2STD) F5521gw Mobile Broadband Device 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MBM3CBUS) F5521gw Mobile Broadband Device Management (COM3) 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MBM3DEVMT) F5521gw Mobile Broadband Driver 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (WWANUSBSERV) F5521gw Mobile Broadband Driver 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (ECNSSNDIS) F5521gw Mobile Broadband Modem Port 1911 Ericsson Business Mobile Networks BV 0BDB 2 Unknown (MODEM) fi-6240dj 114E Fujitsu, Ltd 04C5 1 Unknown (USBSCAN) Generic Bluetooth Radio 0001 Cambridge Silicon Radio, Ltd 0A12 1 Bluetooth Gryphon D120 Barcode Scanner 0300 Datalogic S.p.A. 080C 14 Input HighSpeed Hub 005A NEC Corp. 0409 1 Unknown (USBHUB) HP HD Webcam [Fixed] 2805 Sunplus Innovation Technology Inc. -
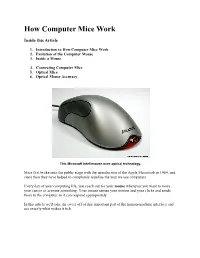
How Computer Mice Work
How Computer Mice Work Inside this Article 1. Introduction to How Computer Mice Work 2. Evolution of the Computer Mouse 3. Inside a Mouse 4. Connecting Computer Mice 5. Optical Mice 6. Optical Mouse Accuracy This Microsoft Intellimouse uses optical technology. Mice first broke onto the public stage with the introduction of the Apple Macintosh in 1984, and since then they have helped to completely redefine the way we use computers. Every day of your computing life, you reach out for your mouse whenever you want to move your cursor or activate something. Your mouse senses your motion and your clicks and sends them to the computer so it can respond appropriately. In this article we'll take the cover off of this important part of the human-machine interface and see exactly what makes it tick. Evolution of the Computer Mouse It is amazing how simple and effective a mouse is, and it is also amazing how long it took mice to become a part of everyday life. Given that people naturally point at things -- usually before they speak -- it is surprising that it took so long for a good pointing device to develop. Although originally conceived in the 1960s, a couple of decades passed before mice became mainstream. In the beginning, there was no need to point because computers used crude interfaces like teletype machines or punch cards for data entry. The early text terminals did nothing more than emulate a teletype (using the screen to replace paper), so it was many years (well into the 1960s and early 1970s) before arrow keys were found on most terminals. -

Computer Basics Study Guide Monitor CPU Mouse Keyboard Scanner Printer
Computer Basics Study Guide CPU (Central Processing Unit) – This is the brain of the computer. The central processing unit, motherboard, hard drive, memory, etc. are all contained in the computer case…everything that makes the computer work. Monitor – A device that displays the signals of the computer. Today, monitors are typically thin or slimline LCD displays. Keyboard – A panel of keys used to operate a computer. It is the primary way we enter data into a computer. Mouse – a hand-operated electronic device that controls the coordinates of a cursor or pointer on your computer screen as you move it around on a pad. An optical mouse has an optical light on the bottom to control the cursor or pointer. A mechanical mouse has a ball on the bottom that rolls to control the cursor or pointer. Printer – A machine connected to a computer used to print text or pictures onto paper. Scanner – a device that captures images from photographic prints, posters, magazine pages, and similar sources for computer editing and display. CPU Monitor Keyboard Mouse Scanner Printer Computer: An electronic device that can store, retrieve, and process data. Kinds of Computers: Desktop, laptop, tablets, smartphones, and even some gaming consoles and TVs 2 Styles of Computers: PC and MAC 2 Parts to Computers: Hardware and Software Hardware – The physical components of a computer that you can see and touch. Examples: Monitor, CPU, Keyboard, Mouse, Printer, and Scanner Input Devices – Any peripheral (piece of computer hardware equipment) used to provide data and control signals to an information processing system such as a computer.