Assessing Seasonality and Density from Passive Acoustic Monitoring of Signals Presumed to Be from Pygmy and Dwarf Sperm Whales in the Gulf of Mexico
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Taxonomic Status of the Genus Sotalia: Species Level Ranking for “Tucuxi” (Sotalia Fluviatilis) and “Costero” (Sotalia Guianensis) Dolphins
MARINE MAMMAL SCIENCE, **(*): ***–*** (*** 2007) C 2007 by the Society for Marine Mammalogy DOI: 10.1111/j.1748-7692.2007.00110.x TAXONOMIC STATUS OF THE GENUS SOTALIA: SPECIES LEVEL RANKING FOR “TUCUXI” (SOTALIA FLUVIATILIS) AND “COSTERO” (SOTALIA GUIANENSIS) DOLPHINS S. CABALLERO Laboratory of Molecular Ecology and Evolution, School of Biological Sciences, University of Auckland, Private Bag 92019, Auckland, New Zealand and Fundacion´ Omacha, Diagonal 86A #30–38, Bogota,´ Colombia F. TRUJILLO Fundacion´ Omacha, Diagonal 86A #30–38, Bogota,´ Colombia J. A. VIANNA Sala L3–244, Departamento de Biologia Geral, ICB, Universidad Federal de Minas Gerais, Avenida Antonio Carlos, 6627 C. P. 486, 31270–010 Belo Horizonte, Brazil and Escuela de Medicina Veterinaria, Facultad de Ecologia y Recursos Naturales, Universidad Andres Bello Republica 252, Santigo, Chile H. BARRIOS-GARRIDO Laboratorio de Sistematica´ de Invertebrados Acuaticos´ (LASIA), Postgrado en Ciencias Biologicas,´ Facultad Experimental de Ciencias,Universidad del Zulia, Avenida Universidad con prolongacion´ Avenida 5 de Julio, Sector Grano de Oro, Maracaibo, Venezuela M. G. MONTIEL Laboratorio de Ecologıa´ y Genetica´ de Poblaciones, Centro de Ecologıa,´ Instituto Venezolano de Investigaciones Cientıficas´ (IVIC), San Antonio de los Altos, Carretera Panamericana km 11, Altos de Pipe, Estado Miranda, Venezuela S. BELTRAN´ -PEDREROS Laboratorio de Zoologia,´ Colec¸ao˜ Zoologica´ Paulo Burheim, Centro Universitario´ Luterano de Manaus, Manaus, Brazil 1 2 MARINE MAMMAL SCIENCE, VOL. **, NO. **, 2007 M. MARMONTEL Sociedade Civil Mamiraua,´ Rua Augusto Correa No.1 Campus do Guama,´ Setor Professional, Guama,´ C. P. 8600, 66075–110 Belem,´ Brazil M. C. SANTOS Projeto Atlantis/Instituto de Biologia da Conservac¸ao,˜ Laboratorio´ de Biologia da Conservac¸ao˜ de Cetaceos,´ Departamento de Zoologia, Universidade Estadual Paulista (UNESP), Campus Rio Claro, Sao˜ Paulo, Brazil M. -
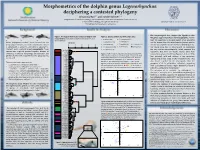
Morphometrics of the Dolphin Genus Lagenorhynchus: Deciphering A
Morphometrics of the dolphin genus Lagenorhynchus: deciphering a contested phylogeny Allison Galezo1,2 and Nicole Vollmer1,3 1 Department of Vertebrate Zoology, Smithsonian Institution National Museum of Natural History 2 Department of Biology, Georgetown University 3 NOAA National Systematics Laboratory Background Results & Analysis Discussion • Our morphological data support the hypothesis that Figure 1. Phenogram from cluster analysis of dolphin skull Figure 2. Species symbols key with sample sizes. measurements. Calculated using Euclidian distances and the genus Lagenorhynchus is not monophyletic, evident Height l La. acutus (24) p C. commersonii (5) a b c Ward’s method. from the separation in the phenogram of La. albirostris Height p C. eutropia (2) Recent phylogenetic studies1-7 have indicated that the Distance l La. albirostris (10) and La. acutus from the other Lagenorhynchus species, 0 2 4 6 8 p genus Lagenorhynchus, currently containing the species 0 2 4 6 8 l La. australis (7) C. heavisidii (1) u Li. borealis (11) and the mix of genera in the lowermost clade (Figure 1). L. obliquidensa, L. acutusb , L. albirostrisc, L. obscurusd , L. l La. obliquidens (28) p C. hectori (2) n Unknown (1) • Our results show that La. obscurus and La. obliquidens e f cruciger , and L. australis , is not monophyletic. These C. commersonii l La. obscurus (15) are very similar morphologically, which supports the C. commersonii species were originally grouped together because of C.C. cocommemmersoniirsonii C. commeC. hersoniictori hypothesis that they are closely related: they have C. commeC. hersoniictori similarities in external morphology and coloration, but C. commeC. hersoniictori Figure 3. -

Riverine and Marine Ecotypes of Sotalia Dolphins Are Different Species
Marine Biology (2005) 148: 449–457 DOI 10.1007/s00227-005-0078-2 RESEARCH ARTICLE H.A. Cunha Æ V.M.F. da Silva Æ J. Lailson-Brito Jr M.C.O. Santos Æ P.A.C. Flores Æ A.R. Martin A.F. Azevedo Æ A.B.L. Fragoso Æ R.C. Zanelatto A.M. Sole´-Cava Riverine and marine ecotypes of Sotalia dolphins are different species Received: 24 December 2004 / Accepted: 14 June 2005 / Published online: 6 September 2005 Ó Springer-Verlag 2005 Abstract The current taxonomic status of Sotalia species cific status of S. fluviatilis ecotypes and their population is uncertain. The genus once comprised five species, but structure along the Brazilian coast. Nested-clade (NCA), in the twentieth century they were grouped into two phylogenetic analyses and analysis of molecular variance (riverine Sotalia fluviatilis and marine Sotalia guianensis) of control region sequences showed that marine and that later were further lumped into a single species riverine ecotypes form very divergent monophyletic (S. fluviatilis), with marine and riverine ecotypes. This groups (2.5% sequence divergence; 75% of total molec- uncertainty hampers the assessment of potential impacts ular variance found between them), which have been on populations and the design of effective conservation evolving independently since an old allopatric fragmen- measures. We used mitochondrial DNA control region tation event. This result is also corroborated by cyto- and cytochrome b sequence data to investigate the spe- chrome b sequence data, for which marine and riverine specimens are fixed for haplotypes that differ by 28 (out Communicated by J. P. -

Cephalorhynchus Hectori) in Porpoise Bay, New Zealand
NewBejder Zealand & Dawson—Hector’s Journal of Marine dolphins and Freshwater in Porpoise Research, Bay 2001, Vol. 35: 277–287 277 0028–8330/01/3502–0277 $7.00 © The Royal Society of New Zealand 2001 Abundance, residency, and habitat utilisation of Hector’s dolphins (Cephalorhynchus hectori) in Porpoise Bay, New Zealand LARS BEJDER INTRODUCTION Department of Biology Hector’s dolphins (Cephalorhynchus hectori van Dalhousie University Beneden 1881) have been studied on a large scale Halifax, Nova Scotia, B3H 4J1 (c. 1000 km) throughout their geographic distribu- Canada tion (Dawson & Slooten 1988; Bräger 1998). On an STEVE DAWSON† intermediate scale (c. 90 km), one regional popula- Department of Marine Science tion (around Banks Peninsula) has been studied in- University of Otago tensively for more than a decade (Slooten & Dawson P. O. Box 56, Dunedin 1994). Little is known about small populations, how- New Zealand ever, or about habitat utilisation at fine scales (<5km). email: [email protected] Hector’s dolphins are restricted to New Zealand, and have a strictly coastal distribution. Despite wide- ranging survey effort, there is no evidence of alongshore movement of more than a few tens of Abstract Theodolite tracking and boat-based kilometres (Slooten et al. 1993; Bräger 1998). Cur- photo-identification surveys were carried out in the rent distribution is highly localised and fragmented austral summers of 1995/96 and 1996/97 to assess into genetically distinct populations (Pichler et al. abundance, residency, and habitat utilisation of 1998). The species is listed by the International Hector’s dolphins (Cephalorhynchus hectori van Union for the Conservation of Nature as “Endan- Beneden 1881) in Porpoise Bay, on the south-east gered” (2000 IUCN red list of threatened species. -

Figure2 Taxonomic Revision of the Dolphin Genus Lagenorhynchus
A) LeDuc et al. 1999, Figure 1 - cyt b (1,140 bp) B) May-Collado & Agnarsson 2006, Figure 2 - cyt b (578 or 1,140 bp) C) Agnarsson & May-Collado 2008, Figure 5 - cyt b (578 or 1,140 bp) 100/100/34 100 100/100 Phocoena spp. Phocoenidae Phocoenidae 65/92 100/100/23 85 Monodontidae 100/100 Feresa attenuata 100 Monodontidae Monodontidae 58/79/1 94/92 Peponocephala electra Orcaella brevirostris 98/99/6 100 Cephalorhynchus commersonii Orcinus orca Globicephala spp. 97/97/9 98 Cephalorhynchus eutropia 100/100 Globicephala spp. Grampus griseus 51/57 80 Cephalorhynchus hectori 55/69 Peponocephala electra Pseudorca crassidens Cephalorhynchus heavisidii 100/100 58/77 Feresa attenuata Orcinus orca 100/100 96 Lagenorhynchus australis Grampus griseus 98/89/9 Orcaella sp. Lagenorhynchus cruciger Pseudorca crassidens 100 99 Lagenorhynchus obliquidens 100/100/13 Lissodelphis borealis 100/100 Cephalorhynchus commersonii Lissodelphis peronii Lagenorhynchus obscurus 99/99 Cephalorhynchus eutropia 56/69/1 Lagenorhynchus obscurus 100 Lissodelphis borealis 73/78 Cephalorhynchus hectori Lagenorhynchus obliquidens Lissodelphis peronii 64/62 Cephalorhynchus heavisidii 100/100/9 100/99/8 Lagenorhynchus cruciger 100 27/X 100/100 Lagenorhynchus australis Delphinus sp. 95/96 Lagenorhynchus australis Lagenorhynchus cruciger 98/99/12 99 Cephalorhynchus heavisidii 59 95 Stenella clymene 100/100 100/100 Lagenorhynchus obliquidens 63/57/ Lagenorhynchus obscurus 2 Cephalorhynchus hectori 100 Stenella coeruleoalba Cephalorhynchus eutropia Stenella frontalis 100/100 Lissodelphis borealis 98/99/5 Cephalorhynchus commersonii 57 Tursiops truncatus Lissodelphis peronii Lagenodelphis hosei Lagenorhynchus albirostris 100/100 100 Sousa chinensis Delphinus sp. Lagenorhynchus acutus 77/77 * Stenella attenuata 99/99 Stenella clymene Steno bredanensis 69 93/89 * Stenella longirostris Stenella coeruleoalba 37/X 99/99 Sotalia fluviatilis 68 51 Sotalia fluviatilis 100 100/100 Stenella frontalis Steno bredanensis Sousa chinensis 43/88 Tursiops aduncus 76/78/2 Lagenorhynchus acutus Tursiops truncatus Stenella spp. -

Marine Mammal Taxonomy
Marine Mammal Taxonomy Kingdom: Animalia (Animals) Phylum: Chordata (Animals with notochords) Subphylum: Vertebrata (Vertebrates) Class: Mammalia (Mammals) Order: Cetacea (Cetaceans) Suborder: Mysticeti (Baleen Whales) Family: Balaenidae (Right Whales) Balaena mysticetus Bowhead whale Eubalaena australis Southern right whale Eubalaena glacialis North Atlantic right whale Eubalaena japonica North Pacific right whale Family: Neobalaenidae (Pygmy Right Whale) Caperea marginata Pygmy right whale Family: Eschrichtiidae (Grey Whale) Eschrichtius robustus Grey whale Family: Balaenopteridae (Rorquals) Balaenoptera acutorostrata Minke whale Balaenoptera bonaerensis Arctic Minke whale Balaenoptera borealis Sei whale Balaenoptera edeni Byrde’s whale Balaenoptera musculus Blue whale Balaenoptera physalus Fin whale Megaptera novaeangliae Humpback whale Order: Cetacea (Cetaceans) Suborder: Odontoceti (Toothed Whales) Family: Physeteridae (Sperm Whale) Physeter macrocephalus Sperm whale Family: Kogiidae (Pygmy and Dwarf Sperm Whales) Kogia breviceps Pygmy sperm whale Kogia sima Dwarf sperm whale DOLPHIN R ESEARCH C ENTER , 58901 Overseas Hwy, Grassy Key, FL 33050 (305) 289 -1121 www.dolphins.org Family: Platanistidae (South Asian River Dolphin) Platanista gangetica gangetica South Asian river dolphin (also known as Ganges and Indus river dolphins) Family: Iniidae (Amazon River Dolphin) Inia geoffrensis Amazon river dolphin (boto) Family: Lipotidae (Chinese River Dolphin) Lipotes vexillifer Chinese river dolphin (baiji) Family: Pontoporiidae (Franciscana) -

Molecular Systematics of South American Dolphins Sotalia: Sister
Available online at www.sciencedirect.com Molecular Phylogenetics and Evolution 46 (2008) 252–268 www.elsevier.com/locate/ympev Molecular systematics of South American dolphins Sotalia: Sister taxa determination and phylogenetic relationships, with insights into a multi-locus phylogeny of the Delphinidae Susana Caballero a,*, Jennifer Jackson a,g, Antonio A. Mignucci-Giannoni b, He´ctor Barrios-Garrido c, Sandra Beltra´n-Pedreros d, Marı´a G. Montiel-Villalobos e, Kelly M. Robertson f, C. Scott Baker a,g a Laboratory of Molecular Ecology and Evolution, School of Biological Sciences, The University of Auckland, Private Bag 92019, Auckland, New Zealand b Red Cariben˜a de Varamientos, Caribbean Stranding Network, PO Box 361715, San Juan 00936-1715, Puerto Rico c Laboratorio de Ecologı´a General, Facultad Experimental de Ciencias. Universidad del Zulia, Av. Universidad con prolongacio´n Av. 5 de Julio. Sector Grano de Oro, Maracaibo, Venezuela d Laboratorio de Zoologia, Colecao Zoologica Paulo Burheim, Centro Universitario Luterano de Manaus, Manaus, Brazil e Laboratorio de Ecologı´a y Gene´tica de Poblaciones, Centro de Ecologı´a, Instituto Venezolano de Investigaciones Cientı´ficas (IVIC), San Antonio de los Altos, Carretera Panamericana km 11, Altos de Pipe, Estado Miranda, Venezuela f Tissue and DNA Archive, National Marine Fisheries Service, Southwest Fisheries Science Center, 8604 La Jolla Shores Drive, La Jolla, CA 92037-1508, USA g Marine Mammal Institute and Department of Fisheries and Wildlife, Hatfield Marine Science Center, Oregon State University, 2030 SE Marine Science Drive, Newport, OR 97365, USA Received 2 May 2007; revised 19 September 2007; accepted 17 October 2007 Available online 25 October 2007 Abstract The evolutionary relationships among members of the cetacean family Delphinidae, the dolphins, pilot whales and killer whales, are still not well understood. -

Review of Small Cetaceans. Distribution, Behaviour, Migration and Threats
Review of Small Cetaceans Distribution, Behaviour, Migration and Threats by Boris M. Culik Illustrations by Maurizio Wurtz, Artescienza Marine Mammal Action Plan / Regional Seas Reports and Studies no. 177 Published by United Nations Environment Programme (UNEP) and the Secretariat of the Convention on the Conservation of Migratory Species of Wild Animals (CMS). Review of Small Cetaceans. Distribution, Behaviour, Migration and Threats. 2004. Compiled for CMS by Boris M. Culik. Illustrations by Maurizio Wurtz, Artescienza. UNEP / CMS Secretariat, Bonn, Germany. 343 pages. Marine Mammal Action Plan / Regional Seas Reports and Studies no. 177 Produced by CMS Secretariat, Bonn, Germany in collaboration with UNEP Coordination team Marco Barbieri, Veronika Lenarz, Laura Meszaros, Hanneke Van Lavieren Editing Rüdiger Strempel Design Karina Waedt The author Boris M. Culik is associate Professor The drawings stem from Prof. Maurizio of Marine Zoology at the Leibnitz Institute of Wurtz, Dept. of Biology at Genova Univer- Marine Sciences at Kiel University (IFM-GEOMAR) sity and illustrator/artist at Artescienza. and works free-lance as a marine biologist. Contact address: Contact address: Prof. Dr. Boris Culik Prof. Maurizio Wurtz F3: Forschung / Fakten / Fantasie Dept. of Biology, Genova University Am Reff 1 Viale Benedetto XV, 5 24226 Heikendorf, Germany 16132 Genova, Italy Email: [email protected] Email: [email protected] www.fh3.de www.artescienza.org © 2004 United Nations Environment Programme (UNEP) / Convention on Migratory Species (CMS). This publication may be reproduced in whole or in part and in any form for educational or non-profit purposes without special permission from the copyright holder, provided acknowledgement of the source is made. -

Vocalizations of Amazon River Dolphins, Inia Geoffrensis: Insights
Ethology 108, 601—612 (2002) Ó 2002 Blackwell Verlag, Berlin ISSN 0179–1613 Vocalizations of Amazon River Dolphins, Inia geoffrensis: Insights into the Evolutionary Origins of Delphinid Whistles Jeffrey Podos*, Vera M. F. da Silva & Marcos R. Rossi-Santosà *Department of Biology, University of Massachusetts, Amherst, MA, USA Laborato´rio de Mami´feros Aqua´ticos, Instituto Nacional de Pesquisas da Amazoˆnia, Manaus, Brazil; àCaixa Postale 10220, Florianopolis, Santa Catarina, Brazil Abstract Oceanic dolphins (Odontoceti: Delphinidae) produce tonal whistles, the structure and function of which have been fairly well characterized. Less is known about the evolutionary origins of delphinid whistles, including basic information about vocal structure in sister taxa such as the Platanistidae river dolphins. Here we characterize vocalizations of the Amazon River dolphin (Inia geoffrensis), for which whistles have been reported but not well documented. We studied Inia at the Mamiraua´ Sustainable Development Reserve in central Brazilian Amazoˆ nia. During 480 5-min blocks (over 5 weeks) we monitored and recorded vocaliza- tions, noted group size and activity, and tallied frequencies of breathing and pre- diving surfaces. Overall, Inia vocal output correlated positively with pre-diving surfaces, suggesting that vocalizations are associated with feeding. Acoustic analyses revealed Inia vocalizations to be structurally distinct from typical delphinid whistles, including those of the delphinid Sotalia fluviatilis recorded at our field site. These data support the hypothesis that whistles are a recently derived vocalization unique to the Delphinidae. Corresponding author: J. Podos, Department of Biology, University of Massachusetts, Amherst, MA 01003, USA. E-mail: [email protected] Introduction Cetaceans produce a diversity of vocalizations, used in a broad range of contexts including orientation, navigation, and communication (e.g. -

Origin and Evolution of Large Brains in Toothed Whales
WellBeing International WBI Studies Repository 12-2004 Origin and Evolution of Large Brains in Toothed Whales Lori Marino Emory University Daniel W. McShea Duke University Mark D. Uhen Cranbrook Institute of Science Follow this and additional works at: https://www.wellbeingintlstudiesrepository.org/acwp_vsm Part of the Animal Studies Commons, Other Animal Sciences Commons, and the Other Ecology and Evolutionary Biology Commons Recommended Citation Marino, L., McShea, D. W., & Uhen, M. D. (2004). Origin and evolution of large brains in toothed whales. The Anatomical Record Part A: Discoveries in Molecular, Cellular, and Evolutionary Biology, 281(2), 1247-1255. This material is brought to you for free and open access by WellBeing International. It has been accepted for inclusion by an authorized administrator of the WBI Studies Repository. For more information, please contact [email protected]. Origin and Evolution of Large Brains in Toothed Whales Lori Marino1, Daniel W. McShea2, and Mark D. Uhen3 1 Emory University 2 Duke University 3 Cranbrook Institute of Science KEYWORDS cetacean, encephalization, odontocetes ABSTRACT Toothed whales (order Cetacea: suborder Odontoceti) are highly encephalized, possessing brains that are significantly larger than expected for their body sizes. In particular, the odontocete superfamily Delphinoidea (dolphins, porpoises, belugas, and narwhals) comprises numerous species with encephalization levels second only to modern humans and greater than all other mammals. Odontocetes have also demonstrated behavioral faculties previously only ascribed to humans and, to some extent, other great apes. How did the large brains of odontocetes evolve? To begin to investigate this question, we quantified and averaged estimates of brain and body size for 36 fossil cetacean species using computed tomography and analyzed these data along with those for modern odontocetes. -

Echolocation Click Parameters and Biosonar Behaviour of the Dwarf Sperm Whale (Kogia Sima) Chloe E
© 2021. Published by The Company of Biologists Ltd | Journal of Experimental Biology (2021) 224, jeb240689. doi:10.1242/jeb.240689 RESEARCH ARTICLE Echolocation click parameters and biosonar behaviour of the dwarf sperm whale (Kogia sima) Chloe E. Malinka1,*, Pernille Tønnesen1, Charlotte A. Dunn2,3, Diane E. Claridge2,3, Tess Gridley4,5, Simon H. Elwen4,5 and Peter Teglberg Madsen1 ABSTRACT estuaries (Madsen and Surlykke, 2013). The deep-diving sperm Dwarf sperm whales (Kogia sima) are small toothed whales that whales, pilot whales, belugas, narwhals and beaked whales are produce narrow-band high-frequency (NBHF) echolocation clicks. among the largest predators on the planet, and have evolved low ∼ Such NBHF clicks, subject to high levels of acoustic absorption, are (<30 kHz) to medium ( 30-80 kHz) frequency, high-power usually produced by small, shallow-diving odontocetes, such as biosonar systems sampling at low rates to find and target mainly porpoises, in keeping with their short-range echolocation and fast cephalopod prey at mesopelagic and bathypelagic depths (Au et al., click rates. Here, we sought to address the problem of how the little- 1987; Møhl et al., 2003; Johnson et al., 2004, 2006; Aguilar de Soto studied and deep-diving Kogia can hunt with NBHF clicks in the deep et al., 2008; Koblitz et al., 2016; Pedersen et al., in review). sea. Specifically, we tested the hypotheses that Kogia produce NBHF Conversely, some of the smallest toothed whales, including river clicks with longer inter-click intervals (ICIs), higher directionality and dolphins (e.g. Inia), small dolphins (e.g. Cephalorhynchus, higher source levels (SLs) compared with other NBHF species. -

Detection and Classification of Narrow-Band High Frequency Echolocation Clicks from Drifting Recorders Emily T
Detection and classification of narrow-band high frequency echolocation clicks from drifting recorders Emily T. Griffiths, Frederick Archer, Shannon Rankin, Jennifer L. Keating, Eric Keen, Jay Barlow, and Jeffrey E. Moore Citation: The Journal of the Acoustical Society of America 147, 3511 (2020); doi: 10.1121/10.0001229 View online: https://doi.org/10.1121/10.0001229 View Table of Contents: https://asa.scitation.org/toc/jas/147/5 Published by the Acoustical Society of America ARTICLES YOU MAY BE INTERESTED IN High resolution three-dimensional beam radiation pattern of harbour porpoise clicks with implications for passive acoustic monitoring The Journal of the Acoustical Society of America 147, 4175 (2020); https://doi.org/10.1121/10.0001376 Real-time observations of the impact of COVID-19 on underwater noise The Journal of the Acoustical Society of America 147, 3390 (2020); https://doi.org/10.1121/10.0001271 Assessing auditory masking for management of underwater anthropogenic noise The Journal of the Acoustical Society of America 147, 3408 (2020); https://doi.org/10.1121/10.0001218 Seabed and range estimation of impulsive time series using a convolutional neural network The Journal of the Acoustical Society of America 147, EL403 (2020); https://doi.org/10.1121/10.0001216 Variations in received levels on a sound and movement tag on a singing humpback whale: Implications for caller identification The Journal of the Acoustical Society of America 147, 3684 (2020); https://doi.org/10.1121/10.0001306 Modeling the acoustic repertoire of Cuvier's beaked whale clicks The Journal of the Acoustical Society of America 147, 3605 (2020); https://doi.org/10.1121/10.0001266 ...................................ARTICLE Detection and classification of narrow-band high frequency echolocation clicks from drifting recorders Emily T.