Resonance Frequency Dependence on Out-Of-Plane Forces for Square
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

“Mechanical Universe and Beyond” Videos—CE Mungan, Spring 2001
Keywords in “Mechanical Universe and Beyond” Videos—C.E. Mungan, Spring 2001 This entire series can be viewed online at http://www.learner.org/resources/series42.html. Some of the titles below have been modified by me to better reflect their contents. In my opinion, tapes 21–22 are the best in the whole series! 1. Introduction to Classical Mechanics: Kepler, Galileo, Newton 2. Falling Bodies: s = gt2 / 2, ! = gt, a = g 3. Differentiation: introductory math 4. Inertia: Newton’s first law, Copernican solar system 5. Vectors: quaternions, unit vectors, dot and cross products 6. Newton’s Laws: Newton’s second law, momentum, Newton’s third law, monkey-gun demo 7. Integration: Newton vs. Leibniz, anti-derivatives 8. Gravity: planetary orbits, universal law of gravity, the Moon falls toward the Earth 9. UCM: Ptolemaic solar system, centripetal acceleration and force 10. Fundamental Forces: Cavendish experiment, Franklin, unified theory, viscosity, tandem accelerator 11. Gravity and E&M: fundamental constants, speed of light, Oersted experiment, Maxwell 12. Millikan Experiment: CRT, scientific method 13. Energy Conservation: work, gravitational PE, KE, mechanical energy, heat, Joule, microscopic forms of energy, useful available energy 14. PE: stability, conservation, position dependence, escape speed 15. Conservation of Linear Momentum: Descartes, generalized Newton’s second law, Earth- Moon system, linear accelerator 16. SHM: amplitude-independent period of pendulum, timekeeping, restoring force, connection to UCM, elastic PE 17. Resonance: Tacoma Narrows, music, breaking wineglass demo, earthquakes, Aeolian harp, vortex shedding 18. Waves: shock waves, speed of sound, coupled oscillators, wave properties, gravity waves, isothermal vs. adiabatic bulk modulus 19. Conservation of Angular Momentum: Kepler’s second law, vortices, torque, Brahe 20. -

Caltech News
Volume 16, No.7, December 1982 CALTECH NEWS pounds, became optional and were Three Caltech offered in the winter and spring. graduate programs But under this plan, there was an overlap in material that diluted the rank number one program's efficiency, blending per in nationwide survey sons in the same classrooms whose backgrounds varied widely. Some Caltech ranked number one - students took 3B and 3C before either alone or with other institutions proceeding on to 46A and 46B, - in a recent report that judged the which focused on organic systems, scholastic quality of graduate pro" while other students went directly grams in mathematics and science at into the organic program. the nation's major research Another matter to be addressed universities. stemmed from the fact that, across Caltech led the field in geoscience, the country, the lines between inor and shared top rankings with Har ganic and organic chemistry had ' vard in physics. The Institute was in become increasingly blurred. Explains a four-way tie for first in chemistry Professor of Chemistry Peter Der with Berkeley, Harvard, and MIT. van, "We use common analytical The report was the result of a equipment. We are both molecule two-year, $500,000 study published builders in our efforts to invent new under the sponsorship of four aca materials. We use common bonds for demic groups - the American Coun The Mead Laboratory is the setting for Chemistry 5, where Carlotta Paulsen uses a rotary probing how chemical bonds are evaporator to remove a solvent from a synthesized product. Paulsen is a junior majoring in made and broken." cil of Learned Societies, the American chemistry. -

Nuclear Magnetic Resonance and Its Application in Condensed Matter Physics
Nuclear Magnetic Resonance and Its Application in Condensed Matter Physics Kangbo Hao 1. Introduction Nuclear Magnetic Resonance (NMR) is a physics phenomenon first observed by Isidor Rabi in 1938. [1] Since then, the NMR spectroscopy has been applied in a wide range of areas such as physics, chemistry, and medical examination. In this paper, I want to briefly discuss about the theory of NMR spectroscopy and its recent application in condensed matter physics. 2. Principles of NMR NMR occurs when some certain nuclei are in a static magnetic field and another oscillation magnetic field. Assuming a nucleus has a spin angular momentum 퐼⃗ = ℏ푚퐼, then its magnetic moment 휇⃗ is 휇⃗ = 훾퐼⃗ (1) The 훾 here is the gyromagnetic ratio, which depends on the property of the nucleus. If we put such a nucleus in a static magnetic field 퐵⃗⃗0, then the magnetic moment of this nuclei will process about this magnetic field. Therefore we have, [2] [3] 푑퐼⃗ 1 푑휇⃗⃗⃗ 휏⃗ = 휇⃗ × 퐵⃗⃗ = = (2) 0 푑푥 훾 푑푥 From this semiclassical picture, we can easily derive that the precession frequency 휔0 (which is called the Larmor angular frequency) is 휔0 = 훾퐵0 (3) Then, if another small oscillating magnetic field is added to the plane perpendicular to 퐵⃗⃗0, then the total magnetic field is (Assuming 퐵⃗⃗0 is in 푧̂ direction) 퐵⃗⃗ = 퐵0푧̂ + 퐵1(cos(휔푡) 푥̂ + sin(휔푡) 푦̂) (4) If we choose a frame (푥̂′, 푦̂′, 푧̂′ = 푧̂) rotating with the oscillating magnetic field, then the effective magnetic field in this frame is 휔 퐵̂ = (퐵 − ) 푧̂ + 퐵 푥̂′ (5) 푒푓푓 0 훾 1 As a result, at 휔 = 훾퐵0, which is the resonant frequency, the 푧̂ component will vanish, and thus the spin angular momentum will precess about 퐵⃗⃗1 instead. -

Notes on Resonance Simple Harmonic Oscillator • a Mass on An
Notes on Resonance Simple Harmonic Oscillator · A mass on an ideal spring with no friction and no external driving force · Equation of motion: max = - kx · Late time motion: x(t) = Asin(w0 t) OR x(t) = Acos(w0 t) OR k x(t) = A(a sin(w t) + b cos(w t)), where w = is the so-called natural frequency of the 0 0 0 m oscillator · Late time motion is the same as beginning motion; the amplitude A is determined completely by the initial state of motion; the more energy put in to start, the larger the amplitude of the motion; the figure below shows two simple harmonic oscillations, both with k = 8 N/m and m = 0.5 kg, but one with an initial energy of 16 J, the other with 4 J. 2.5 2 1.5 1 0.5 0 -0.5 0 5 10 15 20 -1 -1.5 -2 -2.5 Time (s) Damped Harmonic Motion · A mass on an ideal spring with friction, but no external driving force · Equation of motion: max = - kx + friction; friction is often represented by a velocity dependent force, such as one might encounter for slow motion in a fluid: friction = - bv x · Late time motion: friction converts coherent mechanical energy into incoherent mechanical energy (dissipation); as a result a mass on a spring moving with friction always “runs down” and ultimately stops; this “dead” end state x = 0, vx = 0 is called an attractor of the dynamics because all initial states ultimately end up there; the late time amplitude of the motion is always zero for a damped harmonic oscillator; the following figure shows two different damped oscillations, both with k = 8 N/m and m = 0.5 kg, but one with b = 0.5 Ns/m (the oscillation that lasts longer), the other with b = 2 Ns/m. -

Condensed Matter Physics Experiments List 1
Physics 431: Modern Physics Laboratory – Condensed Matter Physics Experiments The Oscilloscope and Function Generator Exercise. This ungraded exercise allows students to learn about oscilloscopes and function generators. Students measure digital and analog signals of different frequencies and amplitudes, explore how triggering works, and learn about the signal averaging and analysis features of digital scopes. They also explore the consequences of finite input impedance of the scope and and output impedance of the generator. List 1 Electron Charge and Boltzmann Constants from Johnson Noise and Shot Noise Mea- surements. Because electronic noise is an intrinsic characteristic of electronic components and circuits, it is related to fundamental constants and can be used to measure them. The Johnson (thermal) noise across a resistor is amplified and measured at both room temperature and liquid nitrogen temperature for a series of different resistances. The amplifier contribution to the mea- sured noise is subtracted out and the dependence of the noise voltage on the value of the resistance leads to the value of the Boltzmann constant kB. In shot noise, a series of different currents are passed through a vacuum diode and the RMS noise across a load resistor is measured at each current. Since the current is carried by electron-size charges, the shot noise measurements contain information about the magnitude of the elementary charge e. The experiment also introduces the concept of “noise figure” of an amplifier and gives students experience with a FFT signal analyzer. Hall Effect in Conductors and Semiconductors. The classical Hall effect is the basis of most sensors used in magnetic field measurements. -

AN826 Crystal Oscillator Basics and Crystal Selection for Rfpic™ And
AN826 Crystal Oscillator Basics and Crystal Selection for rfPICTM and PICmicro® Devices • What temperature stability is needed? Author: Steven Bible Microchip Technology Inc. • What temperature range will be required? • Which enclosure (holder) do you desire? INTRODUCTION • What load capacitance (CL) do you require? • What shunt capacitance (C ) do you require? Oscillators are an important component of radio fre- 0 quency (RF) and digital devices. Today, product design • Is pullability required? engineers often do not find themselves designing oscil- • What motional capacitance (C1) do you require? lators because the oscillator circuitry is provided on the • What Equivalent Series Resistance (ESR) is device. However, the circuitry is not complete. Selec- required? tion of the crystal and external capacitors have been • What drive level is required? left to the product design engineer. If the incorrect crys- To the uninitiated, these are overwhelming questions. tal and external capacitors are selected, it can lead to a What effect do these specifications have on the opera- product that does not operate properly, fails prema- tion of the oscillator? What do they mean? It becomes turely, or will not operate over the intended temperature apparent to the product design engineer that the only range. For product success it is important that the way to answer these questions is to understand how an designer understand how an oscillator operates in oscillator works. order to select the correct crystal. This Application Note will not make you into an oscilla- Selection of a crystal appears deceivingly simple. Take tor designer. It will only explain the operation of an for example the case of a microcontroller. -

Resonance Beyond Frequency-Matching
Resonance Beyond Frequency-Matching Zhenyu Wang (王振宇)1, Mingzhe Li (李明哲)1,2, & Ruifang Wang (王瑞方)1,2* 1 Department of Physics, Xiamen University, Xiamen 361005, China. 2 Institute of Theoretical Physics and Astrophysics, Xiamen University, Xiamen 361005, China. *Corresponding author. [email protected] Resonance, defined as the oscillation of a system when the temporal frequency of an external stimulus matches a natural frequency of the system, is important in both fundamental physics and applied disciplines. However, the spatial character of oscillation is not considered in the definition of resonance. In this work, we reveal the creation of spatial resonance when the stimulus matches the space pattern of a normal mode in an oscillating system. The complete resonance, which we call multidimensional resonance, is a combination of both the spatial and the conventionally defined (temporal) resonance and can be several orders of magnitude stronger than the temporal resonance alone. We further elucidate that the spin wave produced by multidimensional resonance drives considerably faster reversal of the vortex core in a magnetic nanodisk. Our findings provide insight into the nature of wave dynamics and open the door to novel applications. I. INTRODUCTION Resonance is a universal property of oscillation in both classical and quantum physics[1,2]. Resonance occurs at a wide range of scales, from subatomic particles[2,3] to astronomical objects[4]. A thorough understanding of resonance is therefore crucial for both fundamental research[4-8] and numerous related applications[9-12]. The simplest resonance system is composed of one oscillating element, for instance, a pendulum. Such a simple system features a single inherent resonance frequency. -

Understanding What Really Happens at Resonance
feature article Resonance Revealed: Understanding What Really Happens at Resonance Chris White Wood RESONANCE focus on some underlying principles and use these to construct The word has various meanings in acoustics, chemistry, vector diagrams to explain the resonance phenomenon. It thus electronics, mechanics, even astronomy. But for vibration aspires to provide a more intuitive understanding. professionals, it is the definition from the field of mechanics that is of interest, and it is usually stated thus: SYSTEM BEHAVIOR Before we move on to the why and how, let us review the what— “The condition where a system or body is subjected to an that is, what happens when a cyclic force, gradually increasing oscillating force close to its natural frequency.” from zero frequency, is applied to a vibrating system. Let us consider the shaft of some rotating machine. Rotor Yet this definition seems incomplete. It really only states the balancing is always performed to within a tolerance; there condition necessary for resonance to occur—telling us nothing will always be some degree of residual unbalance, which will of the condition itself. How does a system behave at resonance, give rise to a rotating centrifugal force. Although the residual and why? Why does the behavior change as it passes through unbalance is due to a nonsymmetrical distribution of mass resonance? Why does a system even have a natural frequency? around the center of rotation, we can think of it as an equivalent Of course, we can diagnose machinery vibration resonance “heavy spot” at some point on the rotor. problems without complete answers to these questions. -

NMR for Condensed Matter Physics
Concise History of NMR 1926 ‐ Pauli’s prediction of nuclear spin Gorter 1932 ‐ Detection of nuclear magnetic moment by Stern using Stern molecular beam (1943 Nobel Prize) 1936 ‐ First theoretical prediction of NMR by Gorter; attempt to detect the first NMR failed (LiF & K[Al(SO4)2]12H2O) 20K. 1938 ‐ Prof. Rabi, First detection of nuclear spin (1944 Nobel) 2015 Maglab Summer School 1942 ‐ Prof. Gorter, first published use of “NMR” ( 1967, Fritz Rabi Bloch London Prize) Nuclear Magnetic Resonance 1945 ‐ First NMR, Bloch H2O , Purcell paraffin (shared 1952 Nobel Prize) in Condensed Matter 1949 ‐ W. Knight, discovery of Knight Shift 1950 ‐ Prof. Hahn, discovery of spin echo. Purcell 1961 ‐ First commercial NMR spectrometer Varian A‐60 Arneil P. Reyes Ernst 1964 ‐ FT NMR by Ernst and Anderson (1992 Nobel Prize) NHMFL 1972 ‐ Lauterbur MRI Experiment (2003 Nobel Prize) 1980 ‐ Wuthrich 3D structure of proteins (2002 Nobel Prize) 1995 ‐ NMR at 25T (NHMFL) Lauterbur 2000 ‐ NMR at NHMFL 45T Hybrid (2 GHz NMR) Wuthrichd 2005 ‐ Pulsed field NMR >60T Concise History of NMR ‐ Old vs. New Modern Developments of NMR Magnets Technical improvements parallel developments in electronics cryogenics, superconducting magnets, digital computers. Advances in NMR Magnets 70 100T Superconducting 60 Resistive Hybrid 50 Pulse 40 Nb3Sn 30 NbTi 20 MgB2, HighTc nanotubes 10 0 1950 1960 1970 1980 1990 2000 2010 2020 2030 NMR in medical and industrial applications ¬ MRI, functional MRI ¬ non‐destructive testing ¬ dynamic information ‐ motion of molecules ¬ petroleum ‐ earth's field NMR , pore size distribution in rocks Condensed Matter ChemBio ¬ liquid chromatography, flow probes ¬ process control – petrochemical, mining, polymer production. -
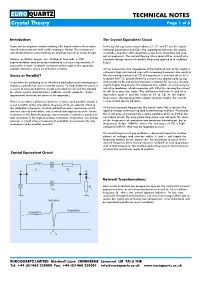
EURO QUARTZ TECHNICAL NOTES Crystal Theory Page 1 of 8
EURO QUARTZ TECHNICAL NOTES Crystal Theory Page 1 of 8 Introduction The Crystal Equivalent Circuit If you are an engineer mainly working with digital devices these notes In the crystal equivalent circuit above, L1, C1 and R1 are the crystal should reacquaint you with a little analogue theory. The treatment is motional parameters and C0 is the capacitance between the crystal non-mathematical, concentrating on practical aspects of circuit design. electrodes, together with capacitances due to its mounting and lead- out arrangement. The current flowing into a load at B as a result of a Various oscillator designs are illustrated that with a little constant-voltage source of variable frequency applied at A is plotted experimentation may be easily modified to suit your requirements. If below. you prefer a more ‘in-depth’ treatment of the subject, the appendix contains formulae and a list of further reading. At low frequencies, the impedance of the motional arm of the crystal is extremely high and current rises with increasing frequency due solely to Series or Parallel? the decreasing reactance of C0. A frequency fr is reached where L1 is resonant with C1, and at which the current rises dramatically, being It can often be confusing as to whether a particular circuit arrangement limited only by RL and crystal motional resistance R1 in series. At only requires a parallel or series resonant crystal. To help clarify this point, it slightly higher frequencies the motional arm exhibits an increasing net is useful to consider both the crystal equivalent circuit and the method inductive reactance, which resonates with C0 at fa, causing the current by which crystal manufacturers calibrate crystal products. -

Comparison Between Resonance and Non-Resonance Type Piezoelectric Acoustic Absorbers
sensors Article Comparison between Resonance and Non-Resonance Type Piezoelectric Acoustic Absorbers Joo Young Pyun , Young Hun Kim , Soo Won Kwon, Won Young Choi and Kwan Kyu Park * Department of Convergence Mechanical Engineering, Hanyang University, Seoul 04763, Korea; [email protected] (J.Y.P.); [email protected] (Y.H.K.); [email protected] (S.W.K.); [email protected] (W.Y.C.) * Correspondence: [email protected] Received: 26 November 2019; Accepted: 18 December 2019; Published: 20 December 2019 Abstract: In this study, piezoelectric acoustic absorbers employing two receivers and one transmitter with a feedback controller were evaluated. Based on the target and resonance frequencies of the system, resonance and non-resonance models were designed and fabricated. With a lateral size less than half the wavelength, the model had stacked structures of lossy acoustic windows, polyvinylidene difluoride, and lead zirconate titanate-5A. The structures of both models were identical, except that the resonance model had steel backing material to adjust the center frequency. Both models were analyzed in the frequency and time domains, and the effectiveness of the absorbers was compared at the target and off-target frequencies. Both models were fabricated and acoustically and electrically characterized. Their reflection reduction ratios were evaluated in the quasi-continuous-wave and time-transient modes. Keywords: resonance model; non-resonance model; piezoelectric material 1. Introduction Piezoelectric transducers are used in various fields, such as nondestructive evaluation, image processing, acoustic signal detection, and energy harvesting [1–4]. Sound navigation and ranging (SONAR) is a technology for acoustic signal detection that can be used to detect objects under water. -

The Harmonic Oscillator
Appendix A The Harmonic Oscillator Properties of the harmonic oscillator arise so often throughout this book that it seemed best to treat the mathematics involved in a separate Appendix. A.1 Simple Harmonic Oscillator The harmonic oscillator equation dates to the time of Newton and Hooke. It follows by combining Newton’s Law of motion (F = Ma, where F is the force on a mass M and a is its acceleration) and Hooke’s Law (which states that the restoring force from a compressed or extended spring is proportional to the displacement from equilibrium and in the opposite direction: thus, FSpring =−Kx, where K is the spring constant) (Fig. A.1). Taking x = 0 as the equilibrium position and letting the force from the spring act on the mass: d2x M + Kx = 0. (A.1) dt2 2 = Dividing by the mass and defining ω0 K/M, the equation becomes d2x + ω2x = 0. (A.2) dt2 0 As may be seen by direct substitution, this equation has simple solutions of the form x = x0 sin ω0t or x0 = cos ω0t, (A.3) The original version of this chapter was revised: Pages 329, 330, 335, and 347 were corrected. The correction to this chapter is available at https://doi.org/10.1007/978-3-319-92796-1_8 © Springer Nature Switzerland AG 2018 329 W. R. Bennett, Jr., The Science of Musical Sound, https://doi.org/10.1007/978-3-319-92796-1 330 A The Harmonic Oscillator Fig. A.1 Frictionless harmonic oscillator showing the spring in compressed and extended positions where t is the time and x0 is the maximum amplitude of the oscillation.