Recent Developments in the Automation of Cars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Why Adas and Autonomous Vehicles Need Thermal Infrared Cameras
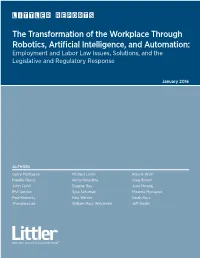
THERMAL FOR ADAS AND AV PART 1 WHY ADAS AND AUTONOMOUS VEHICLES NEED THERMAL INFRARED CAMERAS A CHALLENGING REQUIREMENT 05 CALLS FOR ADVANCED TECHNOLOGY FULL Safe advanced driver assist system (ADAS) The Governors Highway Safety Association vehicles and autonomous vehicles (AV) require states the number of pedestrian fatalities in sensors to deliver scene data adequate for the U.S. has grown substantially faster than 04 the detection and classification algorithms to all other traffic deaths in recent years. They autonomously navigate under all conditions for now account for a larger proportion of traffic SAE automation level 5.1 This is a challenging fatalities than they have in the past 33 years. HIGH requirement for engineers and developers. Pedestrians are especially at risk after dark SELF-DRIVING UBER CAR Visible cameras, sonar, and radar are already when 75% of the 5,987 U.S. pedestrian 03 INVOLVED IN FATAL ACCIDENT in use on production vehicles today at SAE fatalities occurred in 2016.2 Thermal, or MARCH 2018 automation level 2. SAE automation levels 3 longwave infrared (LWIR), cameras can detect CONDITIONAL and 4 test platforms have added light detection and classify pedestrians in darkness, through and ranging (LIDAR) to their sensor suite. most fog conditions, and are unaffected by Each of these technologies has strengths and sun glare, delivering improved situational TESLA HITS COP CAR WHILE 02 ALLEGEDLY ON AUTOPILOT weaknesses. Tragically, as shown in recent awareness that results in more robust, reliable, MAY 2018 Uber and Tesla accidents, the current sensors and safe ADAS and AV. LEVELS SAE AUTOMATION in SAE level 2 and 3 do not adequately detect PARTIAL cars or pedestrians. -

Smart Transportation in China and the United States Yuming Ge, Xiaoman Liu, Libo Tang, and Darrell M
DECEMBER 2017 Smart transportation in China and the United States Yuming Ge, Xiaoman Liu, Libo Tang, and Darrell M. West INTRODUCTION It is no surprise that countries are suffering traffic problems as their rural and suburban populations move to cities and population density increases around urban areas. As cities grow in density, we have seen vehicular congestion, poor urban planning, and insufficient highway designs. The unfortunate downsides of these trends are the loss of lives due to accidents, time and money spent commuting, and lost productivity and economic growth for the system as a whole. All these developments are problematic because transportation accounts for six to 12 percent of Gross Domestic Product in many developed countries.1 The cost of traffic congestion alone is estimated to be greater than $200 billion in four Western countries: France, Germany, the United Kingdom, and the United States.2 But the good news is that recent advancements in computing, network speed, and communications sensors make it possible to improve transportation infrastructure, traffic management, and vehicular operations. Through better infrastructure, ubiquitous connectivity, 5G (fifth generation) networks, Yuming Ge, Xiaoman Liu, and dynamic traffic signals, remote sensors, vehicle-sharing services, and autonomous vehicles, it is Libo Tang are researchers at the possible to increase automotive safety, efficiency, and operations. Connected vehicles are moving China Academy beyond crash notification and lane changing guidance to offer a variety of services related to main- of Information and Communication tenance, operations, and entertainment. 5G networks will enable a shift in cellular technology from Technology (CAICT). supporting fixed services to communication and data exchange that is machine-based. -

Security and Safety with Facial Recognition Feature for Next Generation Automobiles
International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-7 Issue-4S, November 2018 Security and Safety With Facial Recognition Feature for Next Generation Automobiles Nalini Nagendran, Ashwini Kolhe Abstract: This is the era of automated cars or self-driving cars. Many automotive companies Like AUDI, Volvo, All car vendors are trying to come up with different GM,FORD,BMW, VW are prototyping the driver less cars advancements in the cars (Like Automatic car parking, and trying to implement more intelligent driverless car. Automatic Lane changing, automatic braking systems, android auto, car connect, Vehicle to external environment technology There are many disagreement recorded by the self-driving etc). In the automation industry, TESLA, Google and Audi are cars in last year. Google had launched self-driving car which the most competent leader among each other as well as for other drove 140,000 miles on the street of California. Without automation business also. Modern vehicles are all equipped with human intervention car drove successfully but in next lap different technologies like navigation system, driver assistant while car came to automatic lane parking it could not take mode, weather mode, Bluetooth, and other safety features which decision about the bus(speed of the bus was 15kmph and brings broader impact to quality of human’s life, environmental sustainability. This paper explains how the proposed feature, speed of Autonomous car was approximately 2Kmph) which unlocks the semiautonomous cars or autonomous cars safely and was going to hit from back side to Google’s car. This was the provides the safety to the entry level cars. -

Connected and Autonomous Vehicles: Implications for Policy and Practice in City and Transportation Planning
Connected and Autonomous Vehicles: Implications for Policy and Practice in City and Transportation Planning by Charles Ng supervised by Laura Taylor A Major Paper submitted to the Faculty of Environmental Studies in partial fulfillment of the requirements for the degree of Master in Environmental Studies York University, Toronto, Ontario, Canada December 8, 2017 Acknowledgments This paper could not have been completed without the help and support of the caring individuals that I am thankful to have in my life. I would like to thank and acknowledge my mother, Maria, and my sister, Ka Lang for providing me with love and support; my advisor, Peter Timmerman, and my supervisor, Laura Taylor, for providing me with academic and non-academic support; and my invaluable friends that I have made in the MES program for their encouragement, support and relief. i Foreword My Area of Concentration for my Plan of Study is sustainable transportation planning for growth management. Connected and Autonomous Vehicles will change the urban landscape, the roles of governments and present new challenges to planners. This paper has allowed me to view transportation planning through the lens of emerging technologies and how this affects cities in the short and long term. There are many sustainability and growth management implications with Connected and Autonomous Vehicles. For example, automated vehicles can foster decentralization because it easily enables travel however, if utilized correctly, automated vehicles can also compliment local transit systems to support intensification. This is especially important in Ontario (Canada’s first province to allow testing of autonomous vehicles on public roads) as it directly relates to the goals and policies related to sprawl and sustainability as outlined in Ontario’s four provincial land use plans: The Growth Plan for the Greater Golden Horseshoe (GGH), The Greenbelt Plan, The Oak Ridges Moraine Conservation Plan and the Niagara Escarpment Plan. -

Overview of Automotive Sensors William J
296 IEEE SENSORS JOURNAL, VOL. 1, NO. 4, DECEMBER 2001 Overview of Automotive Sensors William J. Fleming Abstract—An up-to-date review paper on automotive sensors is hysteresis, temperature sensitivity and repeatability. Moreover, presented. Attention is focused on sensors used in production auto- even though hundreds of thousands of the sensors may be motive systems. The primary sensor technologies in use today are manufactured, calibrations of each sensor must be interchange- reviewed and are classified according to their three major areas ofautomotive systems application–powertrain, chassis, and body. able within 1 percent. Automotive environmental operating This subject is extensive. As described in this paper, for use in au- requirements are also very severe, with temperatures of 40 tomotive systems, there are six types of rotational motion sensors, to 125 C (engine compartment), vibration sweeps up to four types of pressure sensors, five types of position sensors, and 10 g for 30 h, drops onto concrete floor (to simulate assembly three types of temperature sensors. Additionally, two types of mass mishaps), electromagnetic interference and compatibility, and air flow sensors, five types of exhaust gas oxygen sensors, one type of engine knock sensor, four types of linear acceleration sensors, so on. When purchased in high volume for automotive use, cost four types of angular-rate sensors, four types of occupant com- is also always a major concern. Mature sensors (e.g., pressure fort/convenience sensors, two types of near-distance obstacle detec- types) are currently sold in large-quantities (greater than one tion sensors, four types of far-distance obstacle detection sensors, million units annually) at a low cost of less than $3 (US) per and and ten types of emerging, state-of the-art, sensors technolo- sensor (exact cost is dependent on application constraints and gies are identified. -
2016 WP Transformation of the Workplace Through Robotics, AI And
The Transformation of the Workplace Through Robotics, Artificial Intelligence, and Automation: Employment and Labor Law Issues, Solutions, and the Legislative and Regulatory Response January 2016 AUTHORS Garry Mathiason Michael Lotito Robert Wolff Natalie Pierce Kerry Notestine Greg Brown John Cerilli Eugene Ryu Joon Hwang Phil Gordon Ilyse Schuman Miranda Mossavar Paul Kennedy Paul Weiner Sarah Ross Theodora Lee William Hays Weissman Jeff Seidle IMPORTANT NOTICE This publication is not a do-it-yourself guide to resolving employment disputes or handling employment litigation. Nonetheless, employers involved in ongoing disputes and litigation will find the information extremely useful in understanding the issues raised and their legal context. This report is not a substitute for experienced legal counsel and does not provide legal advice or attempt to address the numerous factual issues that inevitably arise in any employment-related dispute. Copyright ©2016 Littler Mendelson, P.C. All material contained within this publication is protected by copyright law and may not be reproduced without the express written consent of Littler Mendelson. Table of Contents SECTION / TOPIC PAGE I. INTRODUCTION 1 A. Legal Challenges Arising from Robotics, Artificial Intelligence 1 and Automation B. A Note on the Important Concepts Addressed in This Report 2 II. ROBOTICS, AUTOMATION, AND THE NEW WORKPLACE LANDSCAPE (CATEGORY ONE) 3 A. Job Dislocation and Job Creation 4 1. WARN Act 4 2. Severence 4 3. Retraining 5 B. Labor Unions and Collective Bargaining 5 1. Protected Concerted Activity 5 2. Collective Bargaining 6 C. Tax Implications 7 D. Anti-Discrimination 8 1. Age Discrimination in Employment Act of 1967 (ADEA) 8 2. -

Night Vision Technology in Automobiles
International Journal of Mechanical And Production Engineering, ISSN: 2320-2092, Volume- 4, Issue-12, Dec.-2016 NIGHT VISION TECHNOLOGY IN AUTOMOBILES 1SUMIT KARN, 2SOHAN PURBE, 3RASURJYA TALUKDAR, 4KRISHNA KANT GUPTA, 5G.NALLAKUMARASAMY 1,2,3,4B.E. Mechanical Engineering (3rd year), 5Guide, Head of Department, Mechanical Engineering, Excel Engineering College, Namakkal, 637303, T.N., India E-mail: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— Safety and security of life are the two most successful words in the field of transport and manufacturing. The world has known from being a just simple form of day to day life to being aeon of mean and daring machines. Thus the safety of the people both inside and outside the vehicle is of prime concern in the car manufacturing industry and scientists are working day in and day out to ensure more and more complex forms of security for the human kind.After dark, your chances of being in a fatal vechicle crash go up sharply, though the traffic is way down. Inadequate illumination is one of the major factors in all the car crashes that occur between midnight and 6 a.m. Headlights provide about 50 meters of visibility on a dark road, but it takes nearly 110 meters to come to a full stop from 100 km/hr. At that speed, you may not respond fast enough to an unexpected event, simply because the bright spot provided by your headlights doesn't give you enough time.Thus emerged the night vision systems that use infrared sensors to let driver see as much as 3 or 4 times farther ahead and help them quickly distinguish among objects. -
Accelerating the Transition to Zevs in Shared and Autonomous Fleets
Accelerating the transition to ZEVs in shared and autonomous fleets December 4, 2018 Table of contents Executive summary 5 1 Introduction 8 2 Background 10 Electromobility 10 Shared passenger mobility models 11 Shared electric passenger fleets 11 Vehicular automation 12 Barriers to adoption 13 3 Review of implications for low-carbon transportation 15 ZEVs 15 Shared 16 Autonomous 18 ZEV + shared 19 ZEV + autonomous 20 Shared + autonomous 20 ZEV + shared + autonomous 20 4 Electromobility in shared mobility fleets 22 Vehicle type 22 Profiles of users and riders of shared use mobility 22 Profiles of users and riders of shared use ZEVs & opportunities for acceleration 23 Challenges 23 Reasons for adopting BEVs in shared mobility 25 Logistics, operations of BEVs within shared use mobility 26 Trip distance 26 Daily vehicle kilometers traveled and parking time 27 BEV range and charging needs 28 5 Practicality and business case for BEVs in shared use mobility 30 Cost of ownership and BEV value proposition in car sharing 30 Cost of ownership and BEV value proposition in ride hailing 31 6 Shared electromobility deployment conclusions 35 Key success factors 35 Lessons learned 35 Policies that support electromobility in shared use fleets 36 Concluding remarks 38 Appendices A. Growth of shared mobility services 40 B. List of ZEV shared mobility services 41 C. Impacts of ride hailing 44 D. Example of BEV car sharing education tools 45 E. Uber ZEV-related communications 46 F. BEV in ride hailing payback, Montréal and London 48 Accelerating the Transition to ZEVs in Shared and Autonomous Fleets 2 List of figures and tables List of figures Figure 1. -

(IRJET) Pedestrian Detection by Video Processing Using Thermal
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056 Volume: 03 Issue: 12 | Dec -2016 www.irjet.net p-ISSN: 2395-0072 Pedestrian Detection by Video Processing using Thermal and Night Vision System Ankit Dilip Yawale Department of Electronics and Telecommunication JSPM’s Imperial College of Engineering and Research Pune, India Prof. V. B. Raskar Department of Electronics and Telecommunication JSPM’s Imperial College of Engineering and Research,Pune, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - The paper describes the use of thermal camera the population and needs of human being is increasing the and IR night vision system for the detection of Pedestrians numbers are increasing government is trying to decrease the and objects that may cause accident at night time. As per the rate of causality and death. survey most of the accidents cause is due to low vision ability In recent years, According to survey 38% of fatal accidents in of human at night time, which leads to most dangerous and the European Union occur in darkness places, instead the higher number of accidents at night with respect to day time. fact that, the traffic during nights time is several times This system include the IR night vision camera which detects smaller than that on a day. This means that the risk of an the object with the help of IR LED and photodiode pair, this accident in darkness increased. This stats has a strong camera have capability to detect the object up to 100m. The relation and effect on the pedestrians. Currently, the thermal camera detects the heat generated by any of the pedestrians are of about 20 % of all traffic accidents. -

2014 Automated Vehicles Symposium Proceedings
2014 Automated Vehicles Symposium Proceedings 2014 Automated Vehicle Symposium – Synopsis of Proceedings DISCLAIMER The opinions, findings, and conclusions expressed in this publication are those of the speakers and contributors to the Automated Vehicle Symposium and not necessarily those of the United States Department of Transportation. The United States Government assumes no liability for its contents or use thereof. If trade names manufacturers’ names or specific products are mentioned, it is because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Government does not endorse products or manufacturers. 2014 Automated Vehicles Symposium Proceedings—Final December 2014 Publication Number: FHWA-JPO-14-176 Prepared by: Volpe National Transportation Systems Center Cambridge, MA 02142 Prepared for: Intelligent Transportation Systems Joint Program Office Office of the Assistant Secretary for Research and Technology 1200 New Jersey Avenue, S.E. Washington, DC 20590 2 Acknowledgments The 2014 Automated Vehicles Symposium (AVS 2014) was produced through a partnership between the Association of Unmanned Vehicle Systems International (AUVSI) and Transportation Research Board (TRB), and is indebted to its many volunteer contributors and speakers who developed the symposium content, produced sessions, and contributed to the development of these proceedings. AVS 2014 also benefitted from the direct financial contributions of its commercial benefactors, and the institutional support of the many companies and agencies that supported the time, travel, and participation for their staff. The organizing committee gratefully acknowledges the United States Department of Transportation (U.S. DOT) Intelligent Transportation Systems Joint Program Office (ITS JPO) for the level of its support to AVS 2014 and for these proceedings. -

Inhaltsverzeichnis
Digital Business für Verkehr und Mobilität Ist die Zukunft autonom und digital? Hrsg.: Johann Höller, Tanja Illetits-Motta, Stefan Küll, Ursula Niederländer, Martin Stabauer 2020 Inhaltsverzeichnis 1 Ein (digitales) Buch über den Verkehr 2 Trust in Self-Driving Technology 3 Fahrerlose U-Bahnen: 30 Jahre Vorsprung im Öffentlichen Verkehr 4 Augmented Reality (AR) in PKWs 5 Sharing Economy – Vom Produkt zum Service am Beispiel Verkehrsmobilität 6 Personalisierte Mobilität 7 Connected Cars – Profiteure, Risiken und Geschäftsfelder 8 Blockchain und ihre Anwendungen in der Mobilität 9 Urbahne Seilbahnen 10 Potentiale des E-Scooter Sharing-System 11 Last Mile EIN (DIGITALES) BUCH ÜBER DEN VERKEHR? Johann Höller Teil 1 von Digital Business für Verkehr und Mobilität Ist die Zukunft autonom und digital? Institut für Digital Business 2020 Digital Business für Verkehr und Mobilität Ist die Zukunft autonom und digital? Herausgeber: Johann Höller; Tanja Illetits-Motta; Stefan Küll; Ursula Niederländer; Martin Stabauer ISBN: 978-3-9504630-4-0 (eBook) 2020 Johannes Kepler Universität Institut für Digital Business A-4040 Linz, Altenberger Straße 69 https://www.idb.edu/ Detailliertere bibliographische Daten, weitere Beiträge, sowie alternative Formate finden Sie unter https://www.idb.edu/publications/ Bildquelle Titelbild: https://pixabay.com/photos/ebook-tablet-touch-screen-read- 3106983/ Dieser Beitrag unterliegt den Bestimmungen der Creative Commons Namensnennung-Keine kommerzielle Nutzung- Keine Bearbeitung 4.0 International-Lizenz. https://creativecommons.org/licenses/by-nc-nd/4.0/ -

A Simple and Effective Display for Night Vision Systems
PROCEEDINGS of the Fourth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design A SIMPLE AND EFFECTIVE DISPLAY FOR NIGHT VISION SYSTEMS Omer Tsimhoni, Michael J. Flannagan, Mary Lynn Mefford, and Naoko Takenobu University of Michigan Transportation Research Institute Ann Arbor, MI, U.S.A. E-mail: [email protected] Summary: The next generation of automotive night vision systems will likely continue to display to the driver enhanced images of the forward driving scene. In some displays there may also be highlighting of pedestrians and animals, which has been argued to be the primary safety goal of night vision systems. We present here the method that was used to design a conceptual display for night vision systems. Although the primary focus of the method is on safety analysis, consideration is given to driver performance with the system, and exposure to alerts. It also addresses user acceptance and annoyance, distraction, and expected behavior adaptation. The resulting driver interface is a simple and potentially effective display for night vision systems. It consists of a pedestrian icon that indicates when there are pedestrians near the future path of the vehicle. An initial prototype of this night-vision DVI was tested on the road and showed promising results despite its simplicity. It improved pedestrian detection distance from 34 to 44 m and decreased the overall ratio of missed pedestrians from 13% to 5%, correspondingly. The improvement may be attributable to the icon alerting the driver to the presence of a pedestrian. In this experiment, the drivers were probably more alert to the possible presence of pedestrians than drivers in the real world, suggesting that the effect of the icon might be even larger in actual use.