Controlled Basemaps for Mars 2020 Rover Candidate Landing Sites
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Columbus Crater HLS2 Hangout: Exploration Zone Briefing
Columbus Crater HLS2 Hangout: Exploration Zone Briefing Kennda Lynch1,2, Angela Dapremont2, Lauren Kimbrough2, Alex Sessa2, and James Wray2 1Lunar and Planetary Institute/Universities Space Research Association 2Georgia Institute of Technology Columbus Crater: An Overview • Groundwater-fed paleolake located in northwest region of Terra Sirenum • ~110 km in diameter • Diversity of Noachian & Hesperian aged deposits and outcrops • High diversity of aqueous mineral deposits • Estimated 1.5 km depth of sedimentary and/or volcanic infill • High Habitability and Biosignature Preservation Potential LZ & Field Station Latitude: 194.0194 E Longitude: 29.2058 S Altitude: +910 m SROI #1 RROI #1 LZ/HZ SROI #4 SROI #2 SROI #5 22 KM HiRISE Digital Terrain Model (DTM) • HiRISE DTMs are made from two images of the same area on the ground, taken from different look angles (known as a stereo-pair) • DTM’s are powerful research tools that allow researchers to take terrain measurements and model geological processes • For our traversability analysis of Columbus: • The HiRISE DTM was processed and completed by the University of Arizona HiRISE Operations Center. • DTM data were imported into ArcMap 10.5 software and traverses were acquired and analyzed using the 3D analyst tool. • A slope map was created in ArcMap to assess slope values along traverses as a supplement to topography observations. Slope should be ≤30°to meet human mission requirements. Conclusions Traversability • 9 out of the 17 traverses analyzed met the slope criteria for human missions. • This region of Columbus Crater is traversable and allows access to regions of astrobiological interest. It is also a possible access point to other regions of Terra Sirenum. -

NASA Mars Exploration Strategy: “Follow the Water”
Gullies on Mars -- Water or Not? Allan H. Treiman NASA Mars Exploration Strategy: “Follow the Water” Life W Climate A T Geology E Resources R Evidence of Water on Mars Distant Past Crater Degradation and Valley Networks ‘River’ Channels Flat Northern Lowlands Meteorites Carbonate in ALH84001 Clay in nakhlites MER Rover Sites Discoveries Hydrous minerals: jarosite! Fe2O3 from water (blueberries etc.) Silica & sulfate & phosphate deposits Recent Past (Any liquid?) Clouds & Polar Ice Ground Ice Valley Networks and Degraded Craters 1250 km River Channels - Giant Floods! 225 km 10 km craters River Channels - ‘Normal’ Flows 14 km 1 km River Channels from Rain? 700 km Science, July 2, 2004 19 km Ancient Martian Meteorite ALH84001 MER Opportunity - Heatshield and parachute. Jarosite - A Water-bearing Mineral Formed in Groundwater 3+ KFe3 (SO4)2(OH)6 2 Jarosite = K2SO4 + 3 Fe2O3 + 3 H2SO4 Hematite is in “Blueberries,” which still suggest water. Stone Mountain MER Spirit: Columbia Hills H2O Now: Clouds & Polar Caps Ground Ice – Mars Orbiter GRS Water abundances within a few meters depth of the Martian surface. Wm. Feldman. AAAS talk & Los Alamos Nat’l. Lab. Press Release, 15 Feb. 2003. (SPACE.com report, 16 Feb. 2003) So, Water on Mars !! So? Apparently, Mars has/had lots of water. Lots of evidence for ancient liquid water (> ~2 billion years ago), both surface and underground. Martian Gullies - Liquid Water or Not? Material flows down steep slopes, most commonly interpreted as water-bearing debris flows [Malin and Edgett (2000) Science 288, 2330]. Liquid water is difficult to produce and maintain near Mars’ surface, now. -

Downselection of Landing Sites Proposed for the Mars 2020 Rover Mission
47th Lunar and Planetary Science Conference (2016) 2324.pdf DOWNSELECTION OF LANDING SITES PROPOSED FOR THE MARS 2020 ROVER MISSION. M. P. Golombek1, J. A. Grant2, K. A. Farley3, K. Williford1, A. Chen1, R. E. Otero1, and J. W. Ashley1, 1Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109; 2Smithsonian Institution, Center for Earth and Planetary Sciences, Washington, D.C. 20560, 3Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125. Introduction: The Mars 2020 mission would ex- suitable for addressing key planetary evolution ques- plore a site likely to have been habitable, seek signs of tions if and when they are returned to Earth. past life, prepare a returnable cache with the most Results of the voting were presented as the compelling samples, take the first steps towards in-situ weighted average (assigning 5 points to each green resource utilization on Mars, and demonstrate technol- vote, 3 to each yellow vote, and 1 to each red vote that ogy needed for future human and robotic exploration were then summed and divided by the total number of of Mars. The first landing site workshop identified and votes) and the mode (color receiving the most votes). prioritized 27 landing sites proposed by the science This ensured that participants could not skew the re- community according to science objectives that also sults by withholding votes from some sites. Both met the engineering constraints [1]. This abstract de- methods yield similar results and reveal a fall-off in scribes the downselection of landing sites that occurred support for sites ranked lower than the top nine or ten at the second landing site workshop and associated based on mode and average, respectively [2]. -
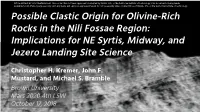
Possible Clastic Origin for Olivine-Rich Rocks in the Nili Fossae Region: Implications for NE Syrtis, Midway, and Jezero Landing Site Science
Possible Clastic Origin for Olivine-Rich Rocks in the Nili Fossae Region: Implications for NE Syrtis, Midway, and Jezero Landing Site Science Christopher H. Kremer, John F. Mustard, and Michael S. Bramble Brown University Mars 2020 4th LSW October 17, 2018 Circum-Isidis Olivine-Rich Unit Mustard et al. (2009) Ehlmann and Mustard (2012) Goudge et al. (2015) Exposed at NE Syrtis, Midway, Enriched in Fo68-91 olivine Diversely altered, with exposures (~10-30%), widely distributed of carbonate with local exposures and Jezero including olivine-rich (Hamilton and Christensen, 2005) of serpentine and talc/saponite analog(?) in Columbia Hills (70,000 km2; Kremer et al., In Review) Previous Hypotheses and Observations Basement Olivine-rich unit 30 km 50 km (Rogers et al., 2018) (after Goudge et al., 2015) (Mustard et al., 2009) Moderate thermal inertia, minimal Unit superposes crater that is regolith or craters, yardangs: unit may be Intrusive origin ruled out by younger than the ~1900 km friable, potentially inconsistent with most superposition of basement diameter Isidis impact basin melt rocks unit Previous Hypotheses and Observations Basement Olivine-rich unit 50 km 30 km Kremer et al. In Review (after Goudge et al., 2015) (Mustard et al., 2009) Moderate thermal inertia, minimal Unit superposes crater that is regolith or craters, yardangs: unit may be Intrusive origin ruled out by younger than the ~1900 km friable, potentially inconsistent with most superposition of basement diameter Isidis impact basin melt rocks unit Hypotheses for Origins of Olivine-Rich Unit ??? Intrusive complex? Lava? (Hamilton and Non-Isidis Impact Sand lag deposit, erg, Volcanic ash?? (Hoefen et al., 2003) Christensen, 2005; condensate or or other epiclastic Tornabene et al., 2008) ejecta? (Rogers et al. -

Mineralogy of the Martian Surface
EA42CH14-Ehlmann ARI 30 April 2014 7:21 Mineralogy of the Martian Surface Bethany L. Ehlmann1,2 and Christopher S. Edwards1 1Division of Geological & Planetary Sciences, California Institute of Technology, Pasadena, California 91125; email: [email protected], [email protected] 2Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California 91109 Annu. Rev. Earth Planet. Sci. 2014. 42:291–315 Keywords First published online as a Review in Advance on Mars, composition, mineralogy, infrared spectroscopy, igneous processes, February 21, 2014 aqueous alteration The Annual Review of Earth and Planetary Sciences is online at earth.annualreviews.org Abstract This article’s doi: The past fifteen years of orbital infrared spectroscopy and in situ exploration 10.1146/annurev-earth-060313-055024 have led to a new understanding of the composition and history of Mars. Copyright c 2014 by Annual Reviews. Globally, Mars has a basaltic upper crust with regionally variable quanti- by California Institute of Technology on 06/09/14. For personal use only. All rights reserved ties of plagioclase, pyroxene, and olivine associated with distinctive terrains. Enrichments in olivine (>20%) are found around the largest basins and Annu. Rev. Earth Planet. Sci. 2014.42:291-315. Downloaded from www.annualreviews.org within late Noachian–early Hesperian lavas. Alkali volcanics are also locally present, pointing to regional differences in igneous processes. Many ma- terials from ancient Mars bear the mineralogic fingerprints of interaction with water. Clay minerals, found in exposures of Noachian crust across the globe, preserve widespread evidence for early weathering, hydrothermal, and diagenetic aqueous environments. Noachian and Hesperian sediments include paleolake deposits with clays, carbonates, sulfates, and chlorides that are more localized in extent. -
Spring 2019 Newsletter
Friends of the Columbia Gorge Protecting the Gorge Since 1980 Spring 2019 Newsletter Spring Brings Hope for the Gorge Friends of the Columbia Gorge Oil train fire and oil spill in Mosier, Board of Directors Oregon, 2016. Geoff Carr Chair Photo: Paloma Ayala Debbie Asakawa Vice Chair Kari Skedsvold Secretary/Treasurer Pat Campbell Greg Delwiche John Nelson* Gwen Farnham Carrie Nobles Donald Friedman Buck Parker* John Harrison Lisa Berkson Platt David Michalek* Mia Prickett Patty Mizutani Vince Ready* Annie Munch Meredith Savery Land Trust Board of Trustees John Nelson* President David Michalek* Secretary/Treasurer John Baugher Land Trust Advisor Pat Campbell Greg Delwiche Take Action Dustin Klinger Barbara Nelson Buck Parker* Rick Ray* Protect Oregon from Dangerous Oil Trains Staff riends of the Columbia Gorge and proposed bills. Especially in light of Sophia Aepfelbacher Membership Coordinator Frances Ambrose* Land Trust Assistant our allies are supporting legislation the Trump administration’s repeal of a Nathan Baker Senior Staff Attorney in Oregon that would improve 2015 Department of Transportation rule Mika Barrett Stewardship Volunteer Coord. Fprotections against crude oil derailments and requiring oil trains to use newer, safer, Dan Bell* Land Trust Director Elizabeth Brooke-Willbanks Development Manager oil spills. House Bill 2858 and Senate Bill 99 breaking technology, Oregon needs to Peter Cornelison* Field Representative would require: ensure it is doing all it can to reduce the Pam Davee Director of Philanthropy threat from -
Visible-To-Near-Infrared Spectral Variability of Hydrated Sulfates and Candidate Mars Landing Sites
Western Washington University Western CEDAR WWU Graduate School Collection WWU Graduate and Undergraduate Scholarship Winter 2018 Visible-to-Near-Infrared Spectral Variability of Hydrated Sulfates and Candidate Mars Landing Sites: Implications for the Mastcam- Z Investigation on NASA’s Mars-2020 Rover Mission Darian Dixon Western Washington University, [email protected] Follow this and additional works at: https://cedar.wwu.edu/wwuet Part of the Geology Commons Recommended Citation Dixon, Darian, "Visible-to-Near-Infrared Spectral Variability of Hydrated Sulfates and Candidate Mars Landing Sites: Implications for the Mastcam-Z Investigation on NASA’s Mars-2020 Rover Mission" (2018). WWU Graduate School Collection. 638. https://cedar.wwu.edu/wwuet/638 This Masters Thesis is brought to you for free and open access by the WWU Graduate and Undergraduate Scholarship at Western CEDAR. It has been accepted for inclusion in WWU Graduate School Collection by an authorized administrator of Western CEDAR. For more information, please contact [email protected]. Visible-to-Near-Infrared Spectral Variability of Hydrated Sulfates and Candidate Mars Landing Sites: Implications for the Mastcam-Z Investigation on NASA’s Mars-2020 Rover Mission By Darian Dixon Accepted in Partial Completion of the Requirements for the Degree Master of Science Kathleen L. Kitto, Dean of the Graduate School ADVISORY COMMITTEE Chair, Dr. Melissa Rice Dr. Pete Stelling Dr. Michael Kraft MASTER’S THESIS In presenting this thesis in partial fulfillment of the requirements for a master’s degree at Western Washington University, I grant to Western Washington University the non-exclusive royalty-free right to archive, reproduce, distribute, and display the thesis in any and all forms, including electronic format, via any digital library mechanisms maintained by WWU. -

A Landing Site for Human Missions to Mars in Gusev Crater. A. Z. Longo1, 1Cardinal Gibbons High School (417 Tharps Lane, Raleigh, NC 27614; [email protected])
First Landing Site/Exploration Zone Workshop for Human Missions to the Surface of Mars (2015) 1008.pdf A Landing Site for Human Missions to Mars in Gusev Crater. A. Z. Longo1, 1Cardinal Gibbons High School (417 Tharps Lane, Raleigh, NC 27614; [email protected]). Introduction: I propose Gusev Crater, the landing site for the Mars Exploration Rover (MER) Spirit, as the location for one of the first crewed missions to Mars in the 2030s. Gusev Crater is a 166-kilometer wide impact basin, named after Russian astronomer Matvey Gusev (1826-1866). The crater is located in the southern highlands of Mars, at 14.5o S, 175.4o E. Current analyses suggest that it formed approximately 4.0-3.8 billion years ago during the Noachian era of the planet’s history. Many different mineral phases and landforms detected in orbital imagery suggest multiple episodes of past fluvial activity. Our current knowledge of the crater consists of data collected from orbital missions [1] since the 1970s and “ground truth” from the Spirit rover. Spirit landed on January 3, 2004 on the floor of the crater. After initial analysis discov- Science Targets: The ellipse contains a land-on, ered basaltic rocks, the rover drove to the Columbia datable volcanic surface, which is a Hesperian ridged Hills, a complex of ~200-foot-tall, heavily eroded plain [3]. The Columbia Hills are located only 2.5 kipukas where it spent the rest of the mission [2]. Af- kilometers from the center of the landing ellipse. The ter discoveries of water-altered rocks dating from the Columbia Hills science targets are located in a remark- Noachian through to the geologically recent past, Spirit ably compact, 3 by 5 kilometer region of interest and succumbed to the cold of the Martian winter in 2011. -

Highlights & Breakthroughs Contribution for American
1 Highlights & Breakthroughs contribution for American Mineralogist on “Wishstone to Watchtower: 2 Amorphous alteration of plagioclase-rich rocks in Gusev crater, Mars” by Stephen W. Ruff and 3 Victoria E. Hamilton 4 5 Joshua L. Bandfield, Space Science Institute, Boulder, CO 80301 6 7 The Mars Exploration Rover “Spirit” provided us with a serendipitous opportunity to traverse a section 8 of the ancient martian crust, acquiring a trove of imaging, geochemical, and mineralogical 9 measurements along the way. This small window looking out on the Noachian period (>3.7 Ga), 10 dubbed the Columbia Hills, pokes out from the younger, volcanically resurfaced floor of Gusev Crater. 11 It was our first detailed look at early Mars, a time when liquid water appears to have played a much 12 more prominent role in shaping and modifying the planet than later in its history. 13 The abundance of rocks that appear to be snapshots from early in the history of Mars are a luxury 14 compared to the rarity and inevitable metamorphic overprinting of Hadean and early Archean samples 15 from Earth. However, few planetary surfaces of this age anywhere in the solar system escape the 16 disruption caused by impacts. In this sense, it is difficult to identify the geologic context of any given 17 sample or series of samples. Although what appears to be an outcrop of a draping volcaniclastic unit in 18 the Columbia Hills may still be in place, it is also possible for it to have been highly fractured, shocked, 19 and overturned (perhaps multiple times) as part of the ejecta blanket from an impact event (e.g., 20 McCoy et al., 2008). -

Microbialites at Gusev Crater, Mars
obiolog str y & f A O u o l t a r e n a r c u h o J Bianciardi, et al., Astrobiol Outreach 2015, 3:5 Journal of Astrobiology & Outreach DOI: 10.4172/2332-2519.1000143 ISSN: 2332-2519 Research Article Open Access Microbialites at Gusev Crater, Mars. Giorgio Bianciardi1,2*, Vincenzo Rizzo2, Maria Eugenia Farias3 and Nicola Cantasano4 1Department of Medical Biotechnologies, University of Siena, Siena, Italy 2National Research Council-retired, Via Repaci 22, Rende, Cosenza, Italy 3Laboratorio de Investigaciones Microbiológicas de Lagunas Andinas (LIMLA), Planta Piloto de Procesos Industriales Microbiológicos (PROIMI), CCT, CONICET, Tucumán, Argentina 4National Research Council, Institute for Agricultural and Forest Systems in the Mediterranean, Rende Research Unit, Cosenza, Italy *Corresponding author: Giorgio Bianciardi, Department of Medical Biotechnologies, University of Siena, Siena, Italy, Tel: +39 348 2650891; E-mail: [email protected] Rec date: September 28, 2015; Acc date: October 31, 2015; Pub date: November 3, 2015 Copyright: © 2015 Giorgio Bianciardi, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited. Abstract The Mars Exploration Rover Spirit investigated plains at Gusev crater, where sedimentary rocks are present. The Spirit rover’s Athena morphological investigation shows microstructures organized in intertwined filaments of microspherules: a texture we have also found on samples of terrestrial stromatolites and other microbialites. We performed a quantitative image analysis to compare 45 microbialites samplings with 50 rover’s ones (approximately 25,000/20,000 microstructures). -

Columbia Hills, Gusev Crater: Mission Overview and Selected Results from the Cumberland Ridge to Home Plate, J
Columbia Hills, Location 14.5478 S, 175.6255 E (lat,lon): MOLA128: -1.932 km Gusev Crater Summary of observations and interpreted history, including unknowns: Gusev crater formed around 3.9–4.1 billion years ago (Werner et al., 2008). The Columbia Hills may represent peak ring hills, intersecting rims of multiple craters, or eroded, possibly lacustrine fill. Subsequent geologic processes emplaced successive volcanics and possibly evaporites, draping over the Hills at dips of 7–30 degrees (McSween et al., 2008; McCoy et al., 2008; Ruff et al., 2014). Basaltic plains dated to 3.65 Ga onlap the Columbia Hills (Greeley et al., 2005). Multiple igneous rock units are present in the Columbia Hills, including high-alkali and high olivine materials and some tuffs or ashes (McSween et al., 2008). Several types of evidence of aqueous processes are preserved in rocks that have possible Al-phyllosilicates (Clark et al., 2007), Mg-Fe carbonates (Morris et al., 2010), and opaline silica (Squyres et al., 2008; Ruff et al., 2011). Near surface soil crusts have ferric sulfates, calcium sulfates, and silica (Arvidson et al., 2010). The silica-enriched rocks and ferric sulfate-bearing soils occur in and around the 80 m-diameter “Home Plate” volcaniclastic deposit. The presence of the Spirit rover represents a long duration exposure facility experiment, of potential value in human exploration. Key units are: the "Comanche" carbonate-bearing outcrops (~15-30 wt% Mg-Fe carbonate, plus olivine and an amorphous silicate), which has been interpreted to result from (a) hydrothermal alteration (Morris et al., 2010) or (b) evaporation of an ephemeral lake (Ruff et al., 2014). -

Poulet, Carter, Wang Et Al., 2013
INTEGRATING IN SITU AND ORBITAL DATA OF MARS: A WATER STORY AT GUSEV CRATER. F. Poulet1, J. Carter2, A. Wang3, S.W. Ruff4 1Institut d’Astrophysique Spatiale, CNRS/Univ. Paris Sud, 91405 Or- say Cedex ([email protected]), 2European Southern Observatory, Santiago 19, Chile, 3Dept. of Earth & Planetary Sciences and McDonnell Center for the Space Sciences, Washington University in St. Louis, 4School of Earth and Space Exploration, Arizona State University, Tempe, AZ 85287-6305. Introduction: The geologic record preserved in the suggesting the presence of precipitated salts from rocks visited by the Spirit rover reveals periods in brines (APXS); 4- an Al-Si-enriched silicate chemistry Martian history in which volcanic and impact events after the removal of salts (APXS) and Fe- were widespread and water was episodically present oxides/hydroxides (MB); 5- the low specific grinding [1]. Of special interest is the identification of rocks in energy values (RAT) indicating low hardness of the the Columbia Hills that underwent substantial altera- rocks; 6- the very-fine grain sizes of RAT abraded tion after their formation with action of liquid water grind targets (MI). most clearly implicated in the major alteration of Clo- vis Class rocks [1,2]. On the other hand, Spirit did not encounter the Ma’adim-related sediments that original- ly drew the mission to Gusev crater as a landing site [3]. The predicted aqueous origin of the crater infilling deposits has been nevertheless recently confirmed by orbital detection of phyllosilicates in sedimentary units [4]. In this paper, we attempt to reconcile analyses from orbital and rover-based observations so as to re- late the aqueous episodes that occurred at Gusev Figure 1.