Circulating Transportation Orbits Between Earth and Mars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Callisto: a Guide to the Origin of the Jupiter System
A PAPER SUBMITTED TO THE DECADAL SURVEY ON PLANETARY SCIENCE AND ASTROBIOLOGY Callisto: A Guide to the Origin of the Jupiter System David E Smith 617-803-3377 Department of Earth, Atmospheric and PLanetary Sciences Massachusetts Institute of Technology, Cambridge MA 02139 [email protected] Co-authors: Francis Nimmo, UCSC, [email protected] Krishan Khurana, UCLA, [email protected] Catherine L. Johnson, PSI, [email protected] Mark Wieczorek, OCA, Fr, [email protected] Maria T. Zuber, MIT, [email protected] Carol Paty, University of Oregon, [email protected] Antonio Genova, Univ Rome, It, [email protected] Erwan Mazarico, NASA GSFC, [email protected] Louise Prockter, LPI, [email protected] Gregory A. Neumann, NASA GSFC Emeritus, [email protected] John E. Connerney, Adnet Systems Inc., [email protected] Edward B. Bierhaus, LMCO, [email protected] Sander J. Goossens, UMBC, [email protected] MichaeL K. Barker, NASA GSFC, [email protected] Peter B. James, Baylor, [email protected] James Head, Brown, [email protected] Jason Soderblom, MIT, [email protected] July 14, 2020 Introduction Among the GaLiLean moons of Jupiter, it is outermost CaLListo that appears to most fulLy preserve the record of its ancient past. With a surface aLmost devoid of signs of internaL geologic activity, and hints from spacecraft data that its interior has an ocean whiLe being only partiaLLy differentiated, CaLListo is the most paradoxicaL of the giant rock-ice worlds. How can a body with such a primordiaL surface harbor an ocean? If the interior was warm enough to form an ocean, how could a mixed rock and ice interior remain stable? What do the striking differences between geologicaLLy unmodified CaLListo and its sibling moon Ganymede teLL us about the formation of the GaLiLean moons and the primordiaL conditions at the time of the formation of CaLListo and the accretion of giant planet systems? The answers can be provided by a CaLListo orbitaL mission. -

Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur
Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur To cite this version: Alex Soumbatov-Gur. Phobos, Deimos: Formation and Evolution. [Research Report] Karpov institute of physical chemistry. 2019. hal-02147461 HAL Id: hal-02147461 https://hal.archives-ouvertes.fr/hal-02147461 Submitted on 4 Jun 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur The moons are confirmed to be ejected parts of Mars’ crust. After explosive throwing out as cone-like rocks they plastically evolved with density decays and materials transformations. Their expansion evolutions were accompanied by global ruptures and small scale rock ejections with concurrent crater formations. The scenario reconciles orbital and physical parameters of the moons. It coherently explains dozens of their properties including spectra, appearances, size differences, crater locations, fracture symmetries, orbits, evolution trends, geologic activity, Phobos’ grooves, mechanism of their origin, etc. The ejective approach is also discussed in the context of observational data on near-Earth asteroids, main belt asteroids Steins, Vesta, and Mars. The approach incorporates known fission mechanism of formation of miniature asteroids, logically accounts for its outliers, and naturally explains formations of small celestial bodies of various sizes. -

Chapter 2: Earth in Space
Chapter 2: Earth in Space 1. Old Ideas, New Ideas 2. Origin of the Universe 3. Stars and Planets 4. Our Solar System 5. Earth, the Sun, and the Seasons 6. The Unique Composition of Earth Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Earth in Space Concept Survey Explain how we are influenced by Earth’s position in space on a daily basis. The Good Earth, Chapter 2: Earth in Space Old Ideas, New Ideas • Why is Earth the only planet known to support life? • How have our views of Earth’s position in space changed over time? • Why is it warmer in summer and colder in winter? (or, How does Earth’s position relative to the sun control the “Earthrise” taken by astronauts aboard Apollo 8, December 1968 climate?) The Good Earth, Chapter 2: Earth in Space Old Ideas, New Ideas From a Geocentric to Heliocentric System sun • Geocentric orbit hypothesis - Ancient civilizations interpreted rising of sun in east and setting in west to indicate the sun (and other planets) revolved around Earth Earth pictured at the center of a – Remained dominant geocentric planetary system idea for more than 2,000 years The Good Earth, Chapter 2: Earth in Space Old Ideas, New Ideas From a Geocentric to Heliocentric System • Heliocentric orbit hypothesis –16th century idea suggested by Copernicus • Confirmed by Galileo’s early 17th century observations of the phases of Venus – Changes in the size and shape of Venus as observed from Earth The Good Earth, Chapter 2: Earth in Space Old Ideas, New Ideas From a Geocentric to Heliocentric System • Galileo used early telescopes to observe changes in the size and shape of Venus as it revolved around the sun The Good Earth, Chapter 2: Earth in Space Earth in Space Conceptest The moon has what type of orbit? A. -
Dwarf Planet Ceres
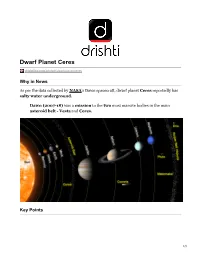
Dwarf Planet Ceres drishtiias.com/printpdf/dwarf-planet-ceres Why in News As per the data collected by NASA’s Dawn spacecraft, dwarf planet Ceres reportedly has salty water underground. Dawn (2007-18) was a mission to the two most massive bodies in the main asteroid belt - Vesta and Ceres. Key Points 1/3 Latest Findings: The scientists have given Ceres the status of an “ocean world” as it has a big reservoir of salty water underneath its frigid surface. This has led to an increased interest of scientists that the dwarf planet was maybe habitable or has the potential to be. Ocean Worlds is a term for ‘Water in the Solar System and Beyond’. The salty water originated in a brine reservoir spread hundreds of miles and about 40 km beneath the surface of the Ceres. Further, there is an evidence that Ceres remains geologically active with cryovolcanism - volcanoes oozing icy material. Instead of molten rock, cryovolcanoes or salty-mud volcanoes release frigid, salty water sometimes mixed with mud. Subsurface Oceans on other Celestial Bodies: Jupiter’s moon Europa, Saturn’s moon Enceladus, Neptune’s moon Triton, and the dwarf planet Pluto. This provides scientists a means to understand the history of the solar system. Ceres: It is the largest object in the asteroid belt between Mars and Jupiter. It was the first member of the asteroid belt to be discovered when Giuseppe Piazzi spotted it in 1801. It is the only dwarf planet located in the inner solar system (includes planets Mercury, Venus, Earth and Mars). Scientists classified it as a dwarf planet in 2006. -

THE PENNY MOON and QUARTER EARTH School Adapted from a Physics Forum Activity At
~ LPI EDUCATION/PUBLIC OUTREACH SCIENCE ACTIVITIES ~ Ages: 5th grade – high THE PENNY MOON AND QUARTER EARTH school Adapted from a Physics Forum activity at: http://www.phvsicsforums.com/ Duration: 10 minutes OVERVIEW — The students will use a penny and a quarter to model the Moon’s rotation on its axis and Materials: revolution around the Earth, and demonstrate that the Moon keeps the same face toward One penny and one the Earth. quarter per pair of students OBJECTIVE — Overhead projector, or The students will: elmo, or video Demonstrate the motion of the Moon’s rotation and revolution. projector Compare what we would see of the Moon if it did not rotate to what we see when its period of rotation is the same as its orbital period. Projected image of student overhead BEFORE YOU START: Do not introduce this topic along with the reason for lunar phases; students may become confused and assume that the Moon’s rotation is related to its phases. Prepare to show the student overhead projected for the class to see. ACTIVITY — 1. Ask your students to describe which parts of the Moon they see. Does the Moon turn? Can we see its far side? Allow time for your students to discuss this and share their opinions. 2. Hand out the pennies and quarters so that each pair of students has both. Tell the students that they will be creating a model of the Earth and Moon. Which object is Earth? [the quarter] Which one is the Moon? [the penny] 3. Turn on the projected student overhead. -
Download Student Activities Objects from the Area Around Its Orbit, Called Its Orbital Zone; at Amnh.Org/Worlds-Beyond-Earth-Educators
INSIDE Essential Questions Synopsis Missions Come Prepared Checklist Correlation to Standards Connections to Other Halls Glossary ONLINE Student Activities Additional Resources amnh.org/worlds-beyond-earth-educators EssentialEssential Questions Questions What is the solar system? In the 20th century, humans began leaving Earth. NASA’s Our solar system consists of our star—the Sun—and all the Apollo space program was the first to land humans on billions of objects that orbit it. These objects, which are bound another world, carrying 12 human astronauts to the Moon’s to the Sun by gravity, include the eight planets—Mercury, surface. Since then we’ve sent our proxies—robots—on Venus, Earth, Mars, Jupiter, Saturn, Uranus, and Neptune; missions near and far across our solar system. Flyby several dwarf planets, including Ceres and Pluto; hundreds missions allow limited glimpses; orbiters survey surfaces; of moons orbiting the planets and other bodies, including landers get a close-up understanding of their landing Jupiter’s four major moons and Saturn’s seven, and, of course, location; and rovers, like human explorers, set off across the Earth’s own moon, the Moon; thousands of comets; millions surface to see what they can find and analyze. of asteroids; and billions of icy objects beyond Neptune. The solar system is shaped like a gigantic disk with the Sun at The results of these explorations are often surprising. With its center. Everywhere we look throughout the universe we the Moon as our only reference, we expected other worlds see similar disk-shaped systems bound together by gravity. to be cold, dry, dead places, but exploration has revealed Examples include faraway galaxies, planetary systems astonishing variety in our solar system. -

Moon-Earth-Sun: the Oldest Three-Body Problem
Moon-Earth-Sun: The oldest three-body problem Martin C. Gutzwiller IBM Research Center, Yorktown Heights, New York 10598 The daily motion of the Moon through the sky has many unusual features that a careful observer can discover without the help of instruments. The three different frequencies for the three degrees of freedom have been known very accurately for 3000 years, and the geometric explanation of the Greek astronomers was basically correct. Whereas Kepler’s laws are sufficient for describing the motion of the planets around the Sun, even the most obvious facts about the lunar motion cannot be understood without the gravitational attraction of both the Earth and the Sun. Newton discussed this problem at great length, and with mixed success; it was the only testing ground for his Universal Gravitation. This background for today’s many-body theory is discussed in some detail because all the guiding principles for our understanding can be traced to the earliest developments of astronomy. They are the oldest results of scientific inquiry, and they were the first ones to be confirmed by the great physicist-mathematicians of the 18th century. By a variety of methods, Laplace was able to claim complete agreement of celestial mechanics with the astronomical observations. Lagrange initiated a new trend wherein the mathematical problems of mechanics could all be solved by the same uniform process; canonical transformations eventually won the field. They were used for the first time on a large scale by Delaunay to find the ultimate solution of the lunar problem by perturbing the solution of the two-body Earth-Moon problem. -

Geology 111 – Discovering Planet Earth
Geology 111 – Discovering Planet Earth A1) Early History of the Earth The earth and the rest of the solar system were formed about 4.57 billion years ago from an enormous cloud of fragments of both icy and rocky material which was produced from the explosions (super novae) of one or more large stars - [see page 11]1. It is likely that the proportions of elements in this material were generally similar to those shown in the diagram below. Although most of the cloud was made of hydrogen and helium, the material that accumulated to form the earth also included a significant amount of the heavier elements, especially elements like carbon, oxygen, iron, aluminum, magnesium and silicon2. As the cloud started to contract, most of the mass accumulated towards the centre to become the sun. Once a critical mass had been reached the sun started to heat up through nuclear fusion of hydrogen into helium. In the region relatively close to the sun - within the orbit of what is now Mars - the heat was sufficient for most of the lighter elements to evaporate, and these were driven outward by the solar wind to the area of the orbits of Jupiter and the other gaseous planets. As a result, the four inner planets - Mercury, Venus, Earth and Mars are "rocky" in their composition, while the four major outer planets, Jupiter, Saturn, Neptune and Uranus are "gaseous". As the ball of fragments and dust that was to eventually become the earth grew, it began to heat up - firstly from the heat of colliding particles - but more importantly from the heat generated by radioactive decay (fission) of uranium, thorium, and potassium (figure below). -

Origin and Evolution of Earth Research Questions for a Changing Planet
Origin and Evolution of Earth Research Questions for a Changing Planet Questions about the origins and nature of Earth have long preoccupied human thought and the scientific endeavor. Deciphering the planet’s history and processes could improve the abil- ity to predict catastrophes like earthquakes and volcanoes, to manage Earth’s resources, and to anticipate changes in climate and geologic processes. This report captures, in a series of questions, the essential scientific challenges that constitute the frontier of Earth science at the start of the 21st century. arth is an active place. Earthquakes rip along plate boundaries, volcanoes spew fountains of Emolten lava, and mountain ranges and seabed are constantly created and destroyed. Earth scientists have long been concerned with deciphering the history—and predicting the future—of this active planet. Over the past four decades, Earth scientists have made great strides in understanding Earth’s workings. Scientists have ever-improving tools to understand how Earth’s internal processes shape the planet’s surface, how life can be sustained over billions of years, and how geological, biological, atmospheric, and oceanic NASA/NDGC processes interact to produce climate—and climatic change. At the request of the U.S. Department of Energy, Na- tional Aeronautics and Space Administration, National Science Foundation, and U.S. Geological Survey, the National Research Council assembled a committee to propose and explore grand ques- tions in Earth science. This report, which is the result of the committee’s deliberations and input solicited from the Earth science community, describes ten “big picture” Earth science issues being pursued today. -

Mission Design for NASA's Inner Heliospheric Sentinels and ESA's
International Symposium on Space Flight Dynamics Mission Design for NASA’s Inner Heliospheric Sentinels and ESA’s Solar Orbiter Missions John Downing, David Folta, Greg Marr (NASA GSFC) Jose Rodriguez-Canabal (ESA/ESOC) Rich Conde, Yanping Guo, Jeff Kelley, Karen Kirby (JHU APL) Abstract This paper will document the mission design and mission analysis performed for NASA’s Inner Heliospheric Sentinels (IHS) and ESA’s Solar Orbiter (SolO) missions, which were conceived to be launched on separate expendable launch vehicles. This paper will also document recent efforts to analyze the possibility of launching the Inner Heliospheric Sentinels and Solar Orbiter missions using a single expendable launch vehicle, nominally an Atlas V 551. 1.1 Baseline Sentinels Mission Design The measurement requirements for the Inner Heliospheric Sentinels (IHS) call for multi- point in-situ observations of Solar Energetic Particles (SEPs) in the inner most Heliosphere. This objective can be achieved by four identical spinning spacecraft launched using a single launch vehicle into slightly different near ecliptic heliocentric orbits, approximately 0.25 by 0.74 AU, using Venus gravity assists. The first Venus flyby will occur approximately 3-6 months after launch, depending on the launch opportunity used. Two of the Sentinels spacecraft, denoted Sentinels-1 and Sentinels-2, will perform three Venus flybys; the first and third flybys will be separated by approximately 674 days (3 Venus orbits). The other two Sentinels spacecraft, denoted Sentinels-3 and Sentinels-4, will perform four Venus flybys; the first and fourth flybys will be separated by approximately 899 days (4 Venus orbits). Nominally, Venus flybys will be separated by integer multiples of the Venus orbital period. -

FAST MARS TRANSFERS THROUGH ON-ORBIT STAGING. D. C. Folta1 , F. J. Vaughn2, G.S. Ra- Witscher3, P.A. Westmeyer4, 1NASA/GSFC
Concepts and Approaches for Mars Exploration (2012) 4181.pdf FAST MARS TRANSFERS THROUGH ON-ORBIT STAGING. D. C. Folta1 , F. J. Vaughn2, G.S. Ra- witscher3, P.A. Westmeyer4, 1NASA/GSFC, Greenbelt Md, 20771, Code 595, Navigation and Mission Design Branch, [email protected], 2NASA/GSFC, Greenbelt Md, 20771, Code 595, Navigation and Mission Design Branch, [email protected], 3NASA/HQ, Washington DC, 20546, Science Mission Directorate, JWST Pro- gram Office, [email protected] , 4NASA/HQ, Washington DC, 20546, Office of the Chief Engineer, [email protected] Introduction: The concept of On-Orbit Staging with pre-positioned fuel in orbit about the destination (OOS) combined with the implementation of a network body and at other strategic locations. We previously of pre-positioned fuel supplies would increase payload demonstrated multiple cases of a fast (< 245-day) mass and reduce overall cost, schedule, and risk [1]. round-trip to Mars that, using OOS combined with pre- OOS enables fast transits to/from Mars, resulting in positioned propulsive elements and supplies sent via total round-trip times of less than 245 days. The OOS fuel-optimal trajectories, can reduce the propulsive concept extends the implementation of ideas originally mass required for the journey by an order-of- put forth by Tsiolkovsky, Oberth, Von Braun and oth- magnitude. ers to address the total mission design [2]. Future Mars OOS can be applied with any class of launch vehi- exploration objectives are difficult to meet using cur- cle, with the only measurable difference being the rent propulsion architectures and fuel-optimal trajecto- number of launches required to deliver the necessary ries. -

Why Atens Enjoy Enhanced Accessibility for Human Space Flight
(Preprint) AAS 11-449 WHY ATENS ENJOY ENHANCED ACCESSIBILITY FOR HUMAN SPACE FLIGHT Daniel R. Adamo* and Brent W. Barbee† Near-Earth objects can be grouped into multiple orbit classifications, among them being the Aten group, whose members have orbits crossing Earth's with semi-major axes less than 1 astronomical unit. Atens comprise well under 10% of known near-Earth objects. This is in dramatic contrast to results from recent human space flight near-Earth object accessibility studies, where the most favorable known destinations are typically almost 50% Atens. Geocentric dynamics explain this enhanced Aten accessibility and lead to an understanding of where the most accessible near-Earth objects reside. Without a com- prehensive space-based survey, however, highly accessible Atens will remain largely un- known. INTRODUCTION In the context of human space flight (HSF), the concept of near-Earth object (NEO) accessibility is highly subjective (Reference 1). Whether or not a particular NEO is accessible critically depends on mass, performance, and reliability of interplanetary HSF systems yet to be designed. Such systems would cer- tainly include propulsion and crew life support with adequate shielding from both solar flares and galactic cosmic radiation. Equally critical architecture options are relevant to NEO accessibility. These options are also far from being determined and include the number of launches supporting an HSF mission, together with whether consumables are to be pre-emplaced at the destination. Until the unknowns of HSF to NEOs come into clearer focus, the notion of relative accessibility is of great utility. Imagine a group of NEOs, each with nearly equal HSF merit determined from their individual characteristics relating to crew safety, scientific return, resource utilization, and planetary defense.