Final Paper: LED Climbing Wall Grant Dumanian Keeton Martin
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analysis of the Accident on Air Guitar
Analysis of the accident on Air Guitar The Safety Committee of the Swedish Climbing Association Draft 2004-05-30 Preface The Swedish Climbing Association (SKF) Safety Committee’s overall purpose is to reduce the number of incidents and accidents in connection to climbing and associated activities, as well as to increase and spread the knowledge of related risks. The fatal accident on the route Air Guitar involved four failed pieces of protection and two experienced climbers. Such unusual circumstances ring a warning bell, calling for an especially careful investigation. The Safety Committee asked the American Alpine Club to perform a preliminary investigation, which was financed by a company formerly owned by one of the climbers. Using the report from the preliminary investigation together with additional material, the Safety Committee has analyzed the accident. The details and results of the analysis are published in this report. There is a large amount of relevant material, and it is impossible to include all of it in this report. The Safety Committee has been forced to select what has been judged to be the most relevant material. Additionally, the remoteness of the accident site, and the difficulty of analyzing the equipment have complicated the analysis. The causes of the accident can never be “proven” with certainty. This report is not the final word on the accident, and the conclusions may need to be changed if new information appears. However, we do believe we have been able to gather sufficient evidence in order to attempt an -
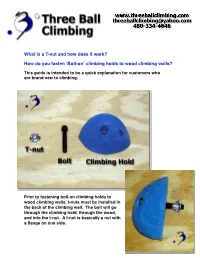
What Is a T-Nut and How Does It Work? How Do You Fasten ʻbolt-Onʼ
What is a T-nut and how does it work? How do you fasten ʻBolt-onʼ climbing holds to wood climbing walls? This guide is intended to be a quick explanation for customers who are brand new to climbing. Prior to fastening bolt-on climbing holds to wood climbing walls, t-nuts must be installed in the back of the climbing wall. The bolt will go through the climbing hold, through the wood, and into the t-nut. A t-nut is basically a nut with a flange on one side. The barrel of the t-nut can fit into a 7/16” hole, but the flange is 1” wide so it cannot fit through the hole. The flange catches the surface of the climbing wall surrounding the 7/16” hole. The Barrel of the T-nut should be recessed behind the front surface of the climbing wall by at least 1/ 4”. Climbing holds must not make di- rect contact with the t-nut. If the climbing hold makes direct con- tact with the t-nut it will eliminate the friction between the surface of the climbing wall and the back of the climbing hold. Climbing holds must have good contact with the climbing wall in order to be secure. Selecting the proper length bolts: Every climbing hold has a different shape and structure. Because of these variations, the depth of the bolt hole varies from one climbing hold to another. Frogs 20 Pack Example: The 20 pack of Frogs Jugs to the right consists of several different shaped grips. -

OUTDOOR ROCK CLIMBING INTENSIVE INTRODUCTION Boulder, CO EQUIPMENT CHECKLIST
www.alpineinstitute.com [email protected] Equipment Shop: 360-671-1570 Administrative Office: 360-671-1505 The Spirit of Alpinism OUTDOOR ROCK CLIMBING INTENSIVE INTRODUCTION Boulder, CO EQUIPMENT CHECKLIST This equipment list is aimed to help you bring only the essential gear for your mountain adventures. Please read this list thoroughly, but exercise common sense when packing for your trip. Climbs in the summer simply do not require as much clothing as those done in the fall or spring. Please pack accordingly and ask questions if you are uncertain. CLIMATE: Temperatures and weather conditions in Boulder area are often conducive to great climbing conditions. Thunderstorms, however, are somewhat common and intense rainstorms often last a few hours in the afternoons. Daytime highs range anywhere from 50°F to 80°F. GEAR PREPARATION: Please take the time to carefully prepare and understand your equipment. If possible, it is best to use it in the field beforehand. Take the time to properly label and identify all personal gear items. Many items that climbers bring are almost identical. Your name on a garment tag or a piece of colored electrical tape is an easy way to label your gear; fingernail polish on hard goods is excellent. If using tape or colored markers, make sure your labeling method is durable and water resistant. ASSISTANCE: At AAI we take equipment and its selection seriously. Our Equipment Services department is expertly staffed by climbers, skiers and guides. Additionally, we only carry products in our store have been thoroughly field tested and approved by our guides. This intensive process ensures that all equipment that you purchase from AAI is best suited to your course and future mountain adventures. -
Victorian Climbing Management Guidelines
Victorian Climbing Management Guidelines Compiled for the Victorian Climbing Community Revision: V04 Published: 15 Sept 2020 1 Contributing Authors: Matthew Brooks - content manager and writer Ashlee Hendy Leigh Hopkinson Kevin Lindorff Aaron Lowndes Phil Neville Matthew Tait Glenn Tempest Mike Tomkins Steven Wilson Endorsed by: Crag Stewards Victoria VICTORIAN CLIMBING MANAGEMENT GUIDELINES V04 15 SEPTEMBER 2020 2 Foreword - Consultation Process for The Victorian Climbing Management Guidelines The need for a process for the Victorian climbing community to discuss widely about best rock-climbing practices and how these can maximise safety and minimise impacts of crag environments has long been recognised. Discussions on these themes have been on-going in the local Victorian and wider Australian climbing communities for many decades. These discussions highlighted a need to broaden the ways for climbers to build collaborative relationships with Traditional Owners and land managers. Over the years, a number of endeavours to build and strengthen such relationships have been undertaken; Victorian climbers have been involved, for example, in a variety of collaborative environmental stewardship projects with Land Managers and Traditional Owners over the last two decades in particular, albeit in an ad hoc manner, as need for such projects have become apparent. The recent widespread climbing bans in the Grampians / Gariwerd have re-energised such discussions and provided a catalyst for reflection on the impacts of climbing, whether inadvertent or intentional, negative or positive. This has focussed considerations of how negative impacts on the environment or cultural heritage can be avoided or minimised and on those climbing practices that are most appropriate, respectful and environmentally sustainable. -
Rock Climbing Fundamentals Has Been Crafted Exclusively For
Disclaimer Rock climbing is an inherently dangerous activity; severe injury or death can occur. The content in this eBook is not a substitute to learning from a professional. Moja Outdoors, Inc. and Pacific Edge Climbing Gym may not be held responsible for any injury or death that might occur upon reading this material. Copyright © 2016 Moja Outdoors, Inc. You are free to share this PDF. Unless credited otherwise, photographs are property of Michael Lim. Other images are from online sources that allow for commercial use with attribution provided. 2 About Words: Sander DiAngelis Images: Michael Lim, @murkytimes This copy of Rock Climbing Fundamentals has been crafted exclusively for: Pacific Edge Climbing Gym Santa Cruz, California 3 Table of Contents 1. A Brief History of Climbing 2. Styles of Climbing 3. An Overview of Climbing Gear 4. Introduction to Common Climbing Holds 5. Basic Technique for New Climbers 6. Belaying Fundamentals 7. Climbing Grades, Explained 8. General Tips and Advice for New Climbers 9. Your Responsibility as a Climber 10.A Simplified Climbing Glossary 11.Useful Bonus Materials More topics at mojagear.com/content 4 Michael Lim 5 A Brief History of Climbing Prior to the evolution of modern rock climbing, the most daring ambitions revolved around peak-bagging in alpine terrain. The concept of climbing a rock face, not necessarily reaching the top of the mountain, was a foreign concept that seemed trivial by comparison. However, by the late 1800s, rock climbing began to evolve into its very own sport. There are 3 areas credited as the birthplace of rock climbing: 1. -

Anchors BODY04
Part 2 of 3 Why Fixed Anchors Are Needed ecreational rock climbing, ranging from traditional mountain- Sport climbing evolved through technological advances in eering to sport climbing, is increasing on national forests. climbing equipment. This type of climbing is usually done on a RR Recreational rock climbing has occurred on national forests single pitch, or face, and often relies on bolts. Sport climbing for many years, inside and outside of designated wilderness. differs from traditional rock climbing where more strategic, and Rock climbers routinely use fixed anchors to assist them in sometimes horizontal, movement is favored over a quick vertical their climb and to help them navigate dangerous terrain safely. climb and descent. Bolted routes increase the margin of safety The safest, most common reliable fixed anchor is an expansion for climbers. bolt, a small steel bolt placed in a hole that has been drilled into the rock (figure 1). Frequently, a “hanger” is attached to an Traditional rock climbing uses removable protection such as expansion bolt to accommodate a carabiner or sling (figure 2). nuts, stoppers, or cam devices, placed into a crack of the rock formation (figure 3). Traditional rock-climbing protection devices require sound judgment for placements. These protection devices are rated for strength in pounds or metric units of force called kilonewtons. A kilonewton rating measures the amount of force that would break a piece of equipment during a fall. Even traditional climbing requires bolts to be placed at the top of a vertical crag for rappelling if there is no other way of descending. Figure 1—An expansion bolt is placed in a drilled hole into the rock. -

HARDWARE Ascenders
Ascenders HARDWARE Rope Grabs Descenders Snaps Carabiners Links Ascenders KONG Twin Ascender Aluminum color anodized Features & Benefits • WLL: 100 grams • Rope Diameter: 8-13mm • Weight: 17.5oz (496g) • Dimensions: 207mm x 162mm • Meets CE and UIAA standards • For use in climbing up, not descending • For individual use only PART #KNG874-03 KONG Lift Ascender Aluminum color anodized Features & Benefits • Rope Diameter: 8-13mm • Weight: 8oz (227g) • Dimensions: 193mm x 90mm • Meets CE and UIAA standards PART # DESCRIPTION KNG896D KNG896S Left Handed KNG896D Right Handed KNG896S Klimair Swiveling eye ascender for use in 2-in-1 lanyards, ascending and rigging applications Features & Benefits • 1/2” Lanyards and Flip Lines • Bi-Directional • .160 Aluminum Shell • Stainless Steel Swiveling Eye • Not for self belay by solo climbers. PART #KLIMAIR Ascenders 56 Ascenders G3A & G4A Spring loaded aluminum ascenders with push pin Features & Benefits • G3A G3A º Capacity: 7/16” to 1/2” (11mm to 13mm) Rope º Breaking strength: 5,000 lbs • G4A º Capacity: 5/8” to 3/4” (14mm to 19mm) Rope º Breaking strength: 5,650 lbs • 3/16” Aluminum Shell • Removable push pin • Spring Loaded Forged Cam • Intended for litter raising and load hauling, where extra strength is required. Not for self belay by solo climbers. PART # DESCRIPTION G4A G3A 7/16” - 1/2” Rope Capacity G4A 5/8” - 3/4” Rope Capacity G3AB & G4AB Aluminum ascenders with bolt and lock nut Features & Benefits G3AB • G3AB º Capacity: 7/16” to 1/2” (11mm to 13mm) Rope º Breaking strength: 5,400 lbs • G4AB º Capacity: 5/8” to 3/4” (14mm to 19mm) Rope º Breaking strength: 5,650 lbs • 3/16” Aluminum Shell • Fixed bolt and lock nut • Spring Loaded Forged Cam • Intended for litter raising and load hauling, where extra strength is required. -

Portaledge Ainsi Que De Places Est Conçu Pour Supporter Une Charge Maximum De 204 Kg
Black Diamond Equipment, Ltd. 2006 Ltd. Equipment, Diamond Black MM6012_B Fabriqué aux P hilippines P aux Fabriqué Philippines Philippines the in Made www.BlackDiamondEquipment.com kostenlosen Katalog. kostenlosen Bitte kontaktieren Sie uns für einen einen für uns Sie kontaktieren Bitte Demandez notre catalogue gratuit! catalogue notre Demandez Please contact us for a free catalog! free a for us contact Please illustration 2 illustration 3 illustration 4 illustration 5 E-mail: [email protected] E-mail: Phone: +41/61 564 33 33, Fax: +41/61 564 33 34 34 33 564 +41/61 Fax: 33, 33 564 +41/61 Phone: 4153 Reinach, Switzerland Switzerland Reinach, 4153 Christoph Merian Ring 7 Ring Merian Christoph Black Diamond Equipment AG Equipment Diamond Black Europe: E-mail: [email protected] [email protected] E-mail: Phone: (801) 278-5533, Fax: (801) 278-5544 278-5544 (801) Fax: 278-5533, (801) Phone: Salt Lake City, UT 84124 84124 UT City, Lake Salt 2084 East 3900 South 3900 East 2084 Black Diamond Equipment, Ltd. Ltd. Equipment, Diamond Black U.S.A.: U.S.A.: illustration 1 illustration 6 illustration 7 illustration 8 illustration 9 plateforme. Cela permet de créer une couche de rembourrage autour des pour supporter une charge maximum de 113 kg. Le Cliff Cabana deux toute responsabilité en cas de dommages directs, indirects, accessoires, tubes pendant le hissage et le transport de votre portaledge ainsi que de places est conçu pour supporter une charge maximum de 204 kg. ou autres types de dommages provenant ou résultant de l’utilisation du prolonger la vie de celui-ci tout en facilitant son montage en paroi. -

Metolius Super Cam Camming Device Review
Welcome Guest! Join SuperTopo Sign In View Cart Home Climbing Areas Climbing Routes Guidebooks Free Topos Photos Gear Forum Home > Rev iews > Climbing > Rock Protection > Small Camming Dev ices > Metolius Super Cam Monday , Nov ember 8, 2010 First Look Gear Review Search Gear Reviews Go Metolius Super Cam Review Camming Device Overall average rating 3.5 of 5 based on 2 votes and 1 user review. Most recent review: October 27, 2010 Street Price: $50 $80 Pros: Big range, stable, rangefinder Cons: Limited sizes, no big cams Best Uses: Parallel sized cracks like you find in sandstone Manufacturer: Metolius Climbing Review by: Chris McNamara on October 2, 2010 Overview The Metolius Super Cam is the biggest climbing cam offering from Metolius Metolius Supercam Climbing. It comes in three sizes that span from 1.65" to 4.67". They use an innovative Credit: metoliusclimbing.com asymetical cam lobe design unlike any other we have seen before. It gives each cam a range that rivals it's main competitor the Black Diamond Camalot C4. Both are about Where to Buy? the same cost but the Camalots are a little lighter. The three sizes of the Supercam (grey, maroon, dark blue) are roughly equivalent to Camalots #24. Resellers Price Reviews REI $49.94 Click to customize your PDFs pdfcrowd.com REI $49.94 (4.0) Metolius uses a unique "Range Finder" color coded system to help you know if the MooseJaw $69.50 cam is bomber or not. If the green dots are touching the rock, the cam is bomber. If MountainGear $69.50 the yellow or red dots are touching, it's not. -
Logistical Support Center
Logistical Support Center Equipment Rental and Sale Catalog Summer/Fall 2021 Logistical Support Center Equipment Rental & Sale Catalog Summer/Fall 2021 This catalog lists all equipment that is available for rent or sale through the Logistical Support Center (LSC). The LSC serves all Northland academic courses and SOEI Outdoor Pursuits programming by provid- ing equipment and rations planning and packing. Using this Catalog: In this catalog, accessories are listed below and object, indented. Accessories that are provided with the item are not italicized and do not cost extra. These are shown for information but can be changed or excluded. Optional accessories are italicized and their price is listed to the right. Quantities for optional accessories should be specified like the items themselves. Sale items are noted with (Sale) after the price. They are priced per item unless otherwise noted. Daily rates are listed for all rental equipment. If a rental is for seven or more consecutive days a discount of 55% will be applied to the rental price. Items noted with a dagger ( † ) and rented for seven or more consecutive days are discounted at a rate of 25% of the daily rate to reflect the pricing scheme of these rental centers. The daily prices at these rates are listed on the far right for these items. Store transfers are handled within Outdoor Pursuits and all equipment, excluding boats, is picked up by the customer from the LSC. Boats will be picked up from the boat shed, located next to the ball fields, with the assistance of an LSC technican. Sizing information is provided at the end of the catalog for items marked with an asterisk ( * ). -

Climbing Management
CLIMBING MANAGEMENT A Guide to Climbing Issues and the Development of a Climbing Management Plan The Access Fund PO Box 17010 Boulder, CO 80308 Tel: (303) 545-6772 Fax: (303) 545-6774 E-mail: [email protected] Website: www.accessfund.org The Access Fund is the only national advocacy organization whose mission keeps climbing areas open and conserves the climbing environment. A 501(c)3 non-profi t supporting and representing over 1.6 million climbers nationwide in all forms of climbing—rock climbing, ice climbing, mountaineering, and bouldering—the Access Fund is the largest US climbing organization with over 15,000 members and affi liates. The Access Fund promotes the responsible use and sound management of climbing resources by working in cooperation with climbers, other recreational users, public land managers and private land owners. We encourage an ethic of personal responsibility, self-regulation, strong conservation values, and minimum impact practices among climbers. Working toward a future in which climbing and access to climbing resources are viewed as legitimate, valued, and positive uses of the land, the Access Fund advocates to federal, state, and local legislators concerning public lands legislation; works closely with federal and state land managers and other interest groups in planning and implementing public lands management and policy; provides funding for conservation and resource management projects; develops, produces, and distributes climber education materials and programs; and assists in the acquisition and management of climbing resources. FOR MORE INFORMATION ABOUT THE ACCESS FUND: Visit http://www.accessfund.org. Copies of this publication are available from the Access Fund and will also be posted on the Access Fund website: http://www.accessfund.org. -

TRICAM MANUALE38 R9
TRI-CAM Method of Figure A Horizontal: Fig. C. In horizontal (or Leading runnered, and/or used in opposition to considerable outward and even upward each other. You must consider how the force, once you've set them with a good jerk C.A.M.P. TRI-CAMS are the result of placement: diagonal) cracks you have a choice of Please do not learn to use TRI-CAMS on a positioning the TRI-CAM fulcrum up or forces of a fall will be transferred by the on the sling. many year’s evolution in cam nut design. Normal: TRI- lead. TRI-CAMS require some getting used fulcrum down. Neither way is best in all rope, not only to the top nut, but also to You'll find C.A.M.P. is TRI-CAMS to be the CAMS work very to. An analogy may be drawn with climbers Constant Tension Loops: situations. Sometimes if you're climbing those below (see Fig. H). It is possible to most versatile artificial chock stones well as a normal who grew up with pitons, making the switch It's a good idea to carry three or four loops directly above the placement, fulcrum wedge a TRI-CAM more securely in place by you’ve ever used. n u t i n to nuts. At first nuts seemed insecure, but tied from 2" lengths of light-weight elastic down will offer the greatest security. At giving it a tap or two downward near the With a little practice TRI-CAMS allow c o n s t r i c t e d as familiarity grew their advantages (bungy) cord.