Simone Biles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Master Thesis Entitled the Impact Social
A Master Thesis entitled The Impact Social Media has on Collegiate Gymnasts: Social Support and Body Image by Alaska Richardson Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Masters of Educational Psychology Degree in The Judith Herb College of Education ________________________________ Mary Ellen Edwards, Ph. D., Committee Chair ________________________________ Revathy Kumar, Ph. D., Committee Member ________________________________ Lynne Hamer, Ph. D., Committee Member ________________________________ Amanda C. Bryant-Friedrich, Ph. D., Dean College of Graduate Studies The University of Toledo May 2018 Copyright 2018, Alaska J. Richardson This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author. ii An Abstract of The Impact Social Media has on Collegiate Gymnasts: Social Support and Body Image by Alaska Richardson Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Masters of Educational Psychology Degree in The Judith Herb College of Education University of Toledo May 2018 With the tremendous growth of technology over the years, social media platforms have become a new and improved way for people from all parts of the globe to stay connected. This can cause many different impacts and actions on individuals who are viewing a variety of social media content or posts. One can become inspired by those they follow by engaging in similar practices to either better themselves or begin to compare themselves to others which can lead to more negative side effects such as developing low self-esteem, anxiety, and even depressive thoughts. Little is known about how social media can impact people’s social support and views on their body images. -

P18 Olmpy Layout 1
THURSDAY, AUGUST 18, 2016 SPORTS Rivals question Britain’s mystery cycling advantage and do what Britain has done today and know the week we’ve had,” she added. Vogel, who beat Britain’s Becky James CYCLING into silver in the sprint, suggested other countries should follow Britain’s lead. “That’s what they’re working for, just working for RIO DE JANEIRO: Germany’s Olympic the Olympics. Maybe that’s our fault, or our sprint gold winner Kristina Vogel has com- nations’ fault,” she said. “But we want to plained that her dominant British rivals compete well between these four years.” have an unfair advantage though she is not British coach Iain Dyer insisted it was a falla- sure what it is. Several riders in Rio have cy to suggest his team is not successful at GALLERY grumbled about Britain’s cycling hegemo- the worlds. They topped the medals table at ny for the past three Olympics. Britain has the worlds in 2013 and 2016, finished fourth won 20 of the 30 golds disputed going in 2014 and only 2015 was a real blip-a 10th back to Beijing 2008. Although they won place finish without a single gold medal. only six this time-one less than the previ- There are twice as many titles up for grabs ous two Games-Britain only had entrants in than the Olympics at world championships. nine of the 10 events as the women’s sprint “We set ourselves up to be successful every team didn’t qualify. four years. If you are to peak every four Just to highlight the level of Britain’s years, it needs to be a bloody good peak, control, in the three events they did not otherwise it’s just a pimple,” said Dyer. -

Simone Biles Wins Sixth US Gymnastics Title by Associated Press, Adapted by Newsela Staff on 08.15.19 Word Count 778 Level 960L
Taking it to the mat: Simone Biles wins sixth US gymnastics title By Associated Press, adapted by Newsela staff on 08.15.19 Word Count 778 Level 960L Image 1. Simone Biles celebrates after competing in the uneven bars to win the all around senior women's competition at the 2019 U.S. Gymnastics Championships Sunday, August 11, 2019, in Kansas City, Missouri. Photo by: Charlie Riedel/AP Photo KANSAS CITY, Missouri — The choice was entirely hers. Yet gymnast Simone Biles knew what she had to do. Sure, she could have taken her triple-twisting double-flip (also called "the triple-double") out of her floor exercise routine the final night of the U.S. women's gymnastics championships on Sunday, August 11. She didn't need the triple-double to win another national title. Still, her coach, Laurent Landi, left the choice to Biles. After the Olympic champion's bid to become the first woman to complete the triple-double in competition came up a bit short on Friday night, he probably knew her choice. Landi has spent enough time in the gym around the 22-year-old to know Biles is reshaping what's possible in her sport. It quickly becomes evident that sidestepping a challenge isn't really Biles' thing. This article is available at 5 reading levels at https://newsela.com. The First Pass So she threw it in at the end of her first tumbling pass, fueled by ambition and unbelievable skill. When the dizzying combination ended with her feet firmly on the floor — if barely in bounds — a jolt shook through the packed arena. -

2016 U.S. Olympic Trials
Page: 1 2016 U.S. Olympic Trials - Women Day 1 Printed: 6/30/2016 10:48:07 A M Rotation Schedule Jul 8, 2016 REVISION #2 Session: 1W -- Senior Women Friday, July 08, 2016 Rotation 1 126 Ragan Smith 113 Amelia Hundley Texas Dreams Cincinnati Gymnastic 120 Maggie Nichols 111 Rachel Gowey Twin City Twisters Chow's 124 Emily Schild 106 Gabrielle Douglas Everest Gymnastics Buckeye Gymnastics 105 Christina Desiderio Parkettes Gymnastics 30 second touch warmup 30 second touch warmup 30 second touch warmup 30 second touch warmup 112 Lauren Hernandez 125 MyKayla Skinner MG Elite Desert Lights 107 Brenna Dowell 122 Alexandra Raisman GAGE Brestyan's Gymnastic 102 Simone Biles 116 Madison Kocian World Champions WOGA Rotation 2 111 Rachel Gowey 120 Maggie Nichols Chow's Twin City Twisters 106 Gabrielle Douglas 124 Emily Schild Buckeye Gymnastics Everest Gymnastics 125 MyKayla Skinner 105 Christina Desiderio Desert Lights Parkettes Gymnastics 112 Lauren Hernandez MG Elite 30 second touch warmup 30 second touch warmup 30 second touch warmup 30 second touch warmup 122 Alexandra Raisman 107 Brenna Dowell Brestyan's Gymnastic GAGE 116 Madison Kocian 102 Simone Biles WOGA World Champions 113 Amelia Hundley 117 Ashton Locklear Cincinnati Gymnastic Everest Gymnastics 126 Ragan Smith Texas Dreams ProScore v 5.2.1 - C opy right 1993-2016 A uburn Electronics Group - Licensed to: A uburn Electronics Group Page: 2 2016 U.S. Olympic Trials - Women Day 1 Printed: 6/30/2016 10:48:07 A M Rotation Schedule Jul 8, 2016 REVISION #2 Session: 1W -- Senior Women Friday, -
Song Lists and Suggestions
Song Lists and Suggestions 1. Ceremony 2. Cocktail Hour 3. Grand Entrance 4. Dinner 5. First Dance 6. Father Daughter Dance 7. Mother Son Dance 8. Bouquet Toss 9. Garter Toss 10. Cake Cutting 11. Wedding (Top 200) If you don’t see a song you want, I probably already have it or I will be happy to get it. Page 1 of 1 Ceremony CD 20 songs, 1.2 hours, 133.9 MB Name Time Album Artist 1 All of Me (In the Style of John Lege… 4:38 Modern Acoustic Music for Beautif… Acoustic Guitar Guy 2 At Last (String Quartet Tribute to E… 2:40 The Gay Wedding Collection Vitamin String Quartet 3 Bittersweet Symphony 3:40 Symphonic Rock Royal Philharmonic Orchestra 4 Bridal March 1:48 For a Lifetime Jonathan Cain 5 Can't Help Falling in Love 2:54 Can't Help Falling in Love - Single Haley Reinhart 6 Can't Help Falling In Love 4:32 Vitamin String Quartet Tribute to M… Vitamin String Quartet 7 Canon in D 5:24 Wedding Music: Instrumental Song… Wedding Music Experts: The O'Nei… 8 The Cello Song 3:17 The Piano Guys The Piano Guys 9 From This Moment On 4:34 Wedding Music: Instrumental Song… Wedding Music Experts: The O'Nei… 10 Here Comes the Sun 3:20 Instrumental Songs - Soft Rock Gu… Instrumental Songs Music 11 In My Life 2:27 In My Life - A Piano Tribute to the… TJR 12 Just The Way You Are 4:22 The Piano Guys 2 The Piano Guys 13 Just the Way You Are 3:14 The Modern Wedding Collection, V… Vitamin String Quartet 14 Latch (Acoustic) 3:41 Nirvana Sam Smith 15 Marry Me 3:25 Save Me, San Francisco (Bonus Tr… Train 16 Over The Rainbow, Simple Gifts 3:44 The Piano Guys The -

Simone Biles: Superstar of Gymnastics: Gymnstars Volume 6 Pdf, Epub, Ebook
SIMONE BILES: SUPERSTAR OF GYMNASTICS: GYMNSTARS VOLUME 6 PDF, EPUB, EBOOK Christine Dzidrums,Ricardo Bufolin,Joseph Dzidrums | 64 pages | 29 Dec 2015 | Creative Media Publishing | 9781938438424 | English | United States Simone Biles: Superstar of Gymnastics: Gymnstars Volume 6 PDF Book Want to Read saving…. To ask other readers questions about Simone Biles , please sign up. Tumbling by Caela Carter. Dec 05, Wendy Mosher rated it it was amazing. No matter what. Goodreads helps you keep track of books you want to read. Open Preview See a Problem? Ron and Nellie became their parents. Olympic Gymnastics Trials, some of these girls will be stars. Books by Christine Dzidrums. One double-page spread, in which 10 separate images trace Biles doing her trademark double layout with a half-twist landing, is electrifying. Brand new: Lowest price The lowest-priced brand-new, unused, unopened, undamaged item in its original packaging where packaging is applicable. Thanks for telling us about the problem. Enlarge cover. Join me with this list of gymnastics books for all ages! Just a moment while we sign you in to your Goodreads account. A proud Angeleno, Christine Dzidrums was born raised and lives in the Los Angeles area with her husband, two sons and daughter. Eileen Jacob rated it it was amazing Sep 01, A lyrical picture book biography of Simone Biles, gymnastics champion and Olympic superstar. Suess Beginners Book Collection by Dr. Grace, Gold, and Glory by Gabrielle Douglas. With insight, flair, and a boundless love for the sport, Meyers answers questions that gymnastics fans have been asking since the last perfect score was handed out over twenty years ago. -

2016 U.S. Olympic Trials
Page: 1 2016 U.S. Olympic Trials - Women Day 2 Printed: 6/30/2016 10:48:23 A M Rotation Schedule Jul 10, 2016 REVISION #2 Session: 2W -- Senior Women Sunday, July 10, 2016 Rotation 1 116 Madison Kocian 102 Simone Biles WOGA World Champions 122 Alexandra Raisman 107 Brenna Dowell Brestyan's Gymnastic GAGE 125 MyKayla Skinner 112 Lauren Hernandez Desert Lights MG Elite 105 Christina Desiderio Parkettes Gymnastics 30 second touch warmup 30 second touch warmup 30 second touch warmup 30 second touch warmup 106 Gabrielle Douglas 124 Emily Schild Buckeye Gymnastics Everest Gymnastics 111 Rachel Gowey 120 Maggie Nichols Chow's Twin City Twisters 113 Amelia Hundley 126 Ragan Smith Cincinnati Gymnastic Texas Dreams Rotation 2 107 Brenna Dowell 122 Alexandra Raisman GAGE Brestyan's Gymnastic 112 Lauren Hernandez 125 MyKayla Skinner MG Elite Desert Lights 105 Christina Desiderio 106 Gabrielle Douglas Parkettes Gymnastics Buckeye Gymnastics 124 Emily Schild Everest Gymnastics 30 second touch warmup 30 second touch warmup 30 second touch warmup 30 second touch warmup 120 Maggie Nichols 111 Rachel Gowey Twin City Twisters Chow's 126 Ragan Smith 113 Amelia Hundley Texas Dreams Cincinnati Gymnastic 102 Simone Biles 116 Madison Kocian World Champions WOGA ProScore v 5.2.1 - C opy right 1993-2016 A uburn Electronics Group - Licensed to: A uburn Electronics Group Page: 2 2016 U.S. Olympic Trials - Women Day 2 Printed: 6/30/2016 10:48:24 A M Rotation Schedule Jul 10, 2016 REVISION #2 Session: 2W -- Senior Women Sunday, July 10, 2016 Rotation 3 112 Lauren -

A Case Study Utilizing Music
THE EVOLVING SELF: A CASE STUDY UTILIZING MUSIC LYRICS TO STUDY EGO IDENTITY by KENT STEWART MICHAEL STEVE THOMA, COMMITTEE CHAIR DEBORAH CASPER SARA TOMEK JAMES JACKSON RICK HOUSER A DISSERTATION Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Educational Studies in Psychology, Research Methodology, and Counseling in the Graduate School of The University of Alabama TUSCALOOSA, ALABAMA 2019 Copyright Kent Stewart Michael 2019 ALL RIGHTS RESERVED ABSTRACT Musicians have written about developmental transitions and the associated struggles for as long as language has been acquired and they have had the means by which to document their lyrics. Modern lyricists have ached about childhood and yearned for home as they enter young adulthood, while others have been preoccupied with romantic interests gained and lost during adolescence and beyond. Some musicians have even delved into questioning social issues, theological paradigms, decisions made by governments, and moral dilemmas in lyrics. Regardless of the developmental crisis being discussed, lyrics have been a medium in which musicians have publicly wrestled with their existential existence. Unfortunately, there is lack of representation in analyzing musical lyrics and other forms of pop culture for personality development in psychological research. This study illustrates a procedure for coding manifestations of three psychosocial stages in music lyrics from an artist’s first album to the most recent album. More specifically, identity, intimacy, and generativity themes were analyzed in John Mayer’s lyrics written during his adolescence, young adulthood, and emerging middle adulthood. Erik Erikson’s psychosocial stage theory is utilized to explain Mayer’s personality at the time each album was released and the development of personality over time. -

John Mayer, See John Mayer (Disambiguation)
For other people named John Mayer, see John Mayer (disambiguation). John Mayer Mayer at the Mile High Music Festival on July 20, 2008 Born John Clayton Mayer October 16, 1977 (age 36) Bridgeport, Connecticut, U.S. Residence Montana, U.S. Education Center for Global Studies at Brien McMahon High School Alma mater Berklee College of Music Occupation recording artist, producer Home town Fairfield, Connecticut, U.S. Parents Richard Mayer Margaret Hoffman Musical career pop Genres blues acoustic blue-eyed soul rock country folk Guitar Instruments vocals omnichord piano harmonica percussion Years active 1998—present Arista Records Labels Aware Records Columbia Records John Mayer Trio Associated acts Fall Out Boy David Ryan Harris Website johnmayer.com John Clayton Mayer (/ˈmeɪ.ər/)[1] (born October 16, 1977) is an American recording artist and producer.[2] Born inBridgeport, Connecticut, and raised in Fairfield, he attended Berklee College of Music in Boston. He moved to Atlanta in 1997, where he refined his skills and gained a following, and he now lives in Montana.[3] His first two studio albums,Room for Squares (2001) and Heavier Things (2003), did well commercially, achieving multi-platinum status.[4] In 2003, he won a Grammy Award for Best Male Pop Vocal Performance for "Your Body Is a Wonderland."[5] Mayer began his career performing mainly acoustic rock, but gradually began a transition towards the blues genre in 2005 by collaborating with renowned blues artists such as B. B. King, Buddy Guy, and Eric Clapton, and by forming theJohn Mayer Trio. The blues influence can be heard throughout his 2005 live album Try! with the John Mayer Trio and his third studio album Continuum, released in September 2006. -

Indigo FM Playlist 9.0 600 Songs, 1.5 Days, 4.76 GB
Page 1 of 11 Indigo FM Playlist 9.0 600 songs, 1.5 days, 4.76 GB Name Time Album Artist 1 Trak 3:34 A A 2 Tell It Like It Is 3:08 Soul Box Aaron Neville 3 She Likes Rock 'n' Roll 3:53 Black Ice AC/DC 4 What Do You Do For Money Honey 3:35 Bonfire (Back in Black- Remastered) AC/DC 5 I Want Your Love 3:30 All Day Venus Adalita 6 Someone Like You 3:17 Adrian Duffy and the Mayo Bothers 7 Push Those Keys 3:06 Adrian Duffy and the Mayo Bothers 8 Pretty Pictures 3:34 triple j Unearthed Aela Kae 9 Dulcimer Stomp/The Other Side 4:59 Pump Aerosmith 10 Mali Cuba 5:38 Afrocubismo AfroCubism 11 Guantanamera 4:05 Afrocubismo AfroCubism 12 Weighing The Promises 3:06 You Go Your Way, I'll Go Mine Ainslie Wills 13 Just for me 3:50 Al Green 14 Don't Wanna Fight 3:53 Sound & Color Alabama Shakes 15 Ouagadougou Boogie 4:38 Abundance Alasdair Fraser 16 The Kelburn Brewer 4:59 Abundance Alasdair Fraser 17 Imagining My Man 5:51 Party Aldous Harding 18 Horizon 4:10 Party Aldous Harding 19 The Rifle 2:44 Word-Issue 46-Dec 2006 Alela Diane 20 Let's Go Out 3:11 triple j Unearthed Alex Lahey 21 You Don't Think You Like People Like Me 3:47 triple j Unearthed Alex Lahey 22 Already Home 3:32 triple j Unearthed Alex the Astronaut 23 Rockstar City 3:32 triple j Unearthed Alex the Astronaut 24 Tidal Wave 3:47 triple j Unearthed Alexander Biggs 25 On The Move To Chakino 3:19 On The Move To Chakino Alexander Tafintsev 26 Blood 4:33 Ab-Ep Ali Barter 27 Hypercolour 3:29 Ab-Ep Ali Barter 28 School's Out 3:31 The Definitive Alice Cooper Alice Cooper 29 Department Of Youth 3:20 -

American Cup Returns to Greensboro, N.C., in 2019
American Cup returns to Greensboro, N.C., in 2019 GREENSBORO, N.C., April 26, 2018 – The American Cup, the USA’s most prestigious international invitational and part of the International Gymnastics Federation’s all-around World Cup series, returns to the Greensboro (N.C.) Coliseum Complex on March 2, 2019, at 11:30 a.m. ET. The American Cup, which was held in Greensboro in 2014, is the anchor of a week that includes four gymnastics events. In addition to the American Cup, the Triple Cup weekend includes the Nastia Liukin Cup on March 1 at 7 p.m. and the men’s Elite Team Cup at 6 p.m. on March 2. The Greensboro Coliseum Complex is also hosting the 2019 Greensboro Gymnastics Invitational Feb. 27-March 3, turning the city into “gymnastics central.” The USA’s Morgan Hurd of Middletown, Del./First State Gymnastics, and Yul Moldauer of Arvada, Colo./University of Oklahoma, won the 2018 American Cup. The American Cup showcases many of the world’s best male and female gymnasts in a one-day, all- around competition, and invitations to compete will be based on performances at the 2018 World Gymnastics Championships. Held in conjunction with the American Cup, the Nastia Liukin Cup features many of the country’s top Junior Olympic female gymnasts and is held at 7 p.m. on the night prior to the American Cup. Named after the 2008 Olympic gold medalist and one of the USA’s most popular gymnasts, the Nastia Liukin Cup showcases gymnasts who qualify through the Nastia Liukin Cup Series. -
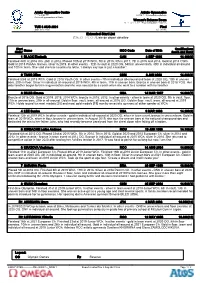
Extended Start List 拡張スタートリスト / Liste De Départ Détaillée
Ariake Gymnastics Centre Artistic Gymnastics 有明体操競技場 体操競技 / Gymnastique artistique Centre de gymnastique d'Ariake Women's Balance Beam 女子種目別平均台 / Poutre d'équilibre - femmes TUE 3 AUG 2021 Final Start Time 17:50 決勝 / Finale Extended Start List 拡張スタートリスト / Liste de départ détaillée Start Qualifications Order Name NOC Code Date of Birth Score and Rank 1 BLACK Elsabeth CAN 8 SEP 1995 14.100(6) Finished 44th at 2016 OG, 26th in 2012. Placed 10th at 2019 WCh, 5th in 2018, 8th in 2017, 7th in 2015 and 2014. Gold at 2014 CWG. Gold at 2015 PanAm Games, silver in 2019. In other events - 12th in vault at 2020 OG, 54th in uneven bars, 30th in individual all-around and 10th in team. She said she has no plans to retire. 'I always say age is just a number.' 2 TANG Xijing CHN 3 JAN 2003 14.333(2) Finished 83rd at 2019 WCh. Gold at 2018 Youth OG. In other events - 7th in individual all-around and team at 2020 OG, 13th in uneven bars, 20th in floor. Silver in individual all-around at 2019 WCh, 4th in team, 11th in uneven bars. Bronze in uneven bars at 2018 YOG. Her older brother began to train in gymnastics and she was scouted by a coach when she went to a session with her brother. 3 BILES Simone USA 14 MAR 1997 14.066(7) Bronze at 2016 OG. Gold at 2019, 2015, 2014 WCh, bronze in 2018, 2013. In other events - silver in team at 2020 OG, 9th in vault, floor, 11th in uneven bars, 25th in all-around.