Personal Area Networks (PAN): Near-Field Intra-Body Communication
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
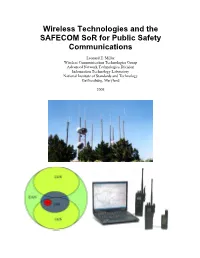
Wireless Technologies and the SAFECOM Sor for Public Safety Communications
Wireless Technologies and the SAFECOM SoR for Public Safety Communications Leonard E. Miller Wireless Communication Technologies Group Advanced Network Technologies Division Information Technology Laboratory National Institute of Standards and Technology Gaithersburg, Maryland 2005 Cover photo: Santa Clara County antenna farm, from http://www.sccfd.org/frequencies.html ii Wireless Technologies and the SAFECOM SoR for Public Safety Communications Preface The Problem: Lack of Capacity, Interoperability, and Functionality National assessments of public safety communications (PSC) that were made in the 1990s found that the nation’s public safety agencies faced several important problems in their use of radio communications1: • First, the radio frequencies allocated for Public Safety use have become highly congested in many, especially urban, areas…. • Second, the ability of officials from different Public Safety agencies to communicate with each other is limited…. Interoperability is hampered by the use of multiple frequency bands, incompatible radio equipment, and a lack of standardization in repeater spacing and transmission formats. • Finally, Public Safety agencies have not been able to implement advanced features to aid in their mission. A wide variety of technologies—both existing and under development —hold substantial promise to reduce danger to Public Safety personnel and to achieve greater efficiencies in the performance of their duties. Broadband data systems, for example, offer greater access to databases and information that can save lives and contribute to keeping criminals “off the street.” Video systems promise better surveillance capabilities, increased use of robotics in toxic and hazardous environments, and better monitoring and tracking of both personnel and equipment. The national assessments of PSC have had significant impact on legislation, regulation, and funding. -

Glossary of Terminology
Glossary of Broadband Terminology This glossary was compiled by Ray Elseth of Broadband Development 3 (http://www.bbd3.com) and Thomas Asp of Virchow Krause (http://virchowkrause.com), and is a supplement to “Broadband Access: The Local Government Role” by Thomas Asp, Harvey L. Reiter, Jerry Schulz, and Ronald L. Vaden (IQ Report 36, no. 2 [Washington, D.C.: ICMA, 2004]). 802.11 A family of specifications covering wireless connectivity between devices normally located within 100’ to 300’ of each other. Often referred to as Wireless Local Area Network (WLAN). Most common implementation is 802.11b (see Wi- Fi), but 802.11a and 802.11g are also in active use. 802.15 A family of specifications covering wireless connectivity between devices normally located within 10’ to 30’ of each other. Often referred to as Wireless Personal Area Network (WPAN). Implemented as “Bluetooth.” 802.16 A family of specifications covering wireless connectivity between devices normally located within 1 to 30 miles of each other. Often referred to as Wireless Metropolitan Area Network (WMAN). Access Point (AP) A hardware device that acts as a connectivity hub to permit users of a wireless device to connect to a wired local area network. Provides a bridge between Ethernet wired LANs (local area networks) and the wireless network. Access points are the connectivity point between Ethernet wired networks and devices equipped with a wireless LAN adapter card. Antenna The equipment that allows the transmission or reception of radio frequency energy. Asynchronous Digital A technology that allows high-speed data to be sent over a Subscriber Line single pair of existing copper telephone lines, with data rates (ADSL) for receiving data differing from data rates for sending data. -

Device-To-Device Communications in LTE-Advanced Network Junyi Feng
Device-to-Device Communications in LTE-Advanced Network Junyi Feng To cite this version: Junyi Feng. Device-to-Device Communications in LTE-Advanced Network. Networking and Internet Architecture [cs.NI]. Télécom Bretagne, Université de Bretagne-Sud, 2013. English. tel-00983507 HAL Id: tel-00983507 https://tel.archives-ouvertes.fr/tel-00983507 Submitted on 25 Apr 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. N° d’ordre : 2013telb0296 Sous le sceau de l’Université européenne de Bretagne Télécom Bretagne En habilitation conjointe avec l’Université de Bretagne-Sud Ecole Doctorale – sicma Device-to-Device Communications in LTE-Advanced Network Thèse de Doctorat Mention : Sciences et Technologies de l’information et de la Communication Présentée par Junyi Feng Département : Signal et Communications Laboratoire : Labsticc Pôle: CACS Directeur de thèse : Samir Saoudi Soutenue le 19 décembre Jury : M. Charles Tatkeu, Chargé de recherche, HDR, IFSTTAR - Lille (Rapporteur) M. Jean-Pierre Cances, Professeur, ENSIL (Rapporteur) M. Jérôme LE Masson, Maître de Conférences, UBS (Examinateur) M. Ramesh Pyndiah, Professeur, Télécom Bretagne (Examinateur) M. Samir Saoudi, Professeur, Télécom Bretagne (Directeur de thèse) M. Thomas Derham, Docteur Ingénieur, Orange Labs Japan (Encadrant) Acknowledgements This PhD thesis is co-supervised by Doctor Thomas DERHAM fromOrangeLabs Tokyo and by Professor Samir SAOUDI from Telecom Bretagne. -

Advantages and Limitations of Li- Fi Over Wi-Fi and Ibeacon Technologies By
ISSN (Online) 2321 – 2004 IJIREEICE ISSN (Print) 2321 – 5526 International Journal of Innovative Research in Electrical, Electronics, Instrumentation and Control Engineering ISO 3297:2007 Certified Vol. 4, Issue 11, November 2016 Review Paper: Advantages and Limitations of Li- Fi over Wi-Fi and iBeacon Technologies By Deepika D Pai Asst. Professor, (Sel Grade), Department of Electronics and Communication Engineering. Vemana Institute of Technology Abstract: Li-Fi can be thought of as a light-based Wi-Fi. That is, it uses light instead of radio waves to transmit information. And instead of Wi-Fi modems, Li-Fi would use transceiver-fitted LED lamps that can light a room as well as transmit and receive information. Light is inherently safe and can be used in places where radio frequency communication is often deemed problematic, such as in aircraft cabins or hospitals. So visible light communication not only has the potential to solve the problem of lack of spectrum space, but can also enable novel application. The visible light spectrum is unused; it's not regulated, and can be used for communication at very high speeds. This paper compares the Li-Fi technology with Wi-Fi and iBeacon technologies. Keywords: Li-fi, Wi-Fi, iBeacon, visible light communication, BLE communication I. INTRODUCTION In recent trends, wireless communication Wi-Fi is gaining government licence. This new Ethernet standard was tremendous importance. CISCO reported that the compatible with devices and technology working on radio compound annual growth rate (CAGR) of mobile data waves and came to be known as ―Wi-Fi‖ only in 1999. usage per month is around 80% which has led to the saturation of the network spectrum consequently bringing iBeacon: The technology was first introduced by Apple at down its efficiency. -

The Future of Personal Area Networks in a Ubiquitous Computing World
Copyright is owned by the Author of the thesis. Permission is given for a copy to be downloaded by an individual for the purpose of research and private study only. The thesis may not be reproduced elsewhere without the permission of the Author. The Future of Personal Area Networks in a Ubiquitous Computing World A thesis presented in partial fulfillment of the requirements for the degree of Master of Information Sciences in Information Systems at Massey University, Auckland New Zealand Fei Zhao 2008 ABSTRACT In the future world of ubiquitous computing, wireless devices will be everywhere. Personal area networks (PANs), networks that facilitate communications between devices within a short range, will be used to send and receive data and commands that fulfill an individual’s needs. This research determines the future prospects of PANs by examining success criteria, application areas and barriers/challenges. An initial set of issues in each of these three areas is identified from the literature. The Delphi Method is used to determine what experts believe what are the most important success criteria, application areas and barriers/challenges. Critical success factors that will determine the future of personal area networks include reliability of connections, interoperability, and usability. Key application areas include monitoring, healthcare, and smart things. Important barriers and challenges facing the deployment of PAN are security, interference and coexistence, and regulation and standards. i ACKNOWLEDGEMENTS Firstly, I would like to take this opportunity to express my sincere gratitude to my supervisor – Associate Professor Dennis Viehland, for all his support and guidance during this research. Without his advice and knowledge, I would not have completed this research. -

Personal Area Network” (PAN)?
High Frequency Design From March 2004 High Frequency Electronics Copyright © 2004 Summit Technical Media, LLC TUTORIAL What is a “Personal Area Network” (PAN)? ew terminology an entire house or a set of offices, but not nec- Here are some notes on the appears regular- essarily the entire building. PAN is then a meaning of Personal Area Nly in the high- room-size network covering an individual’s Network (PAN), a growing tech arena, and wireless work area or a work group. segment of the wireless communications is no communications market exception. One of the Definition by Bandwidth recent additions is PAN, Although there are exceptions, it is valid to or Personal Area Network. This note attempts divide WAN, LAN (and WLAN) and PAN by to explain this term with the hope that it will the data rate, or bandwidth. In general, a see consistent and meaningful usage in busi- WAN is a maximum-rate system using ness and technical dialogue. Gigabit Ethernet or fiber optics for 1 to 40 Gbps transmission. LAN is then the common Networks Can be Defined by Distance 10/100 Mbps Ethernet, and WLAN primarily The most commonly-used terms for data the IEEE 802.11a/b/g system with 2 to 54 communication networks are WAN (Wide Mbps rates. Although PAN is less well- Area Network) and LAN (Local Area defined, it includes lower data systems like Network), with WLAN (Wireless Local Area Bluetooth. However, the first consumer uses of Network) being a specific subset of LAN. Ultra Wideband (UWB) will have PAN-type Distance is the main difference—LAN is gen- range with very high data rates (e.g. -

Beyond Beaconing: Emerging Applications and Challenges of BLE
Beyond Beaconing: Emerging Applications and Challenges of BLE Jian Yanga,∗, Christian Poellabauera, Pramita Mitrab, Cynthia Neubeckerb aDepartment of Computer Science and Engineering, University of Notre Dame, Notre Dame, IN 46556, USA bResearch and Advanced Engineering, Ford Motor Company, Dearborn, MI 48121, USA Abstract As an emerging technology with exceptional low energy consumption and low-latency data transmissions, Bluetooth Low Energy (BLE) has gained significant momentum in various application domains, such as Indoor Positioning, Home Automation, and Wireless Personal Area Network (WPAN) communications. With various novel protocol stack features, BLE is finding use on resource-constrained sensor nodes as well as more powerful gateway devices. Particularly proximity detection using BLE beacons has been a popular usage scenario ever since the release of Bluetooth 4.0, primarily due to the beacons' energy efficiency and ease of deployment. However, with the rapid rise of the Internet of Things (IoT), BLE is likely to be a significant component in many other applications with widely varying performance and Quality-of-Service (QoS) requirements and there is a need for a consolidated view of the role that BLE will play in applications beyond beaconing. This paper comprehensively surveys state-of-the-art applications built with BLE, obstacles to adoption of BLE in new application areas, and current solutions from academia and industry that further expand the capabilities of BLE. Keywords: Bluetooth Low Energy, BLE, Communication, Applications, Low Power, Low Latency. 1. Introduction continuously broadcast an identifier to nearby BLE receivers [3]. This has enabled a multitude of prox- Bluetooth Low Energy (BLE), also known as imity detection solutions, i.e., the beacons allow de- Bluetooth Smart, is an emerging short-range wire- vices such as smartphones and tablets to perform less technology aiming at low-power, low-latency, certain actions when in close proximity to a bea- and low-complexity communications. -

Color Phase Modulation for Li-Fi Communication Pjaee, 17 (10) (2020)
COLOR PHASE MODULATION FOR LI-FI COMMUNICATION PJAEE, 17 (10) (2020) COLOR PHASE MODULATION FOR LI-FI COMMUNICATION D Satyanarayana1, Ashjan2, Modhi3, Amal4, Fawtam5, Mithaa6 1,2,3,4,5,6 College of Engineering, University of Buraimi, Oman, E-mail: [email protected], [email protected], [email protected] [email protected], [email protected] [email protected] D Satyanarayana, Ashjan, Modhi, Amal, Fawtam, Mithaa. Color Phase Modulation For Li-Fi Communication-- Palarch’s Journal Of Archaeology Of Egypt/Egyptology 17(10), 385-393. ISSN 1567-214x Key Words: Li-Fi, Phase Modulation, Visible Light Communication, Wireless Communication. ABSTRACT The need of radio spectrum in wireless communication has crossed with the requirements of the current society. There are few solutions to the radio spectrum insufficiency. One of the alternative solutions is the communication with visible light spectrum, such as Light Fidelity. The paper has a new method for visible light communication called Color Phase Modulation (CPM). The proposed modulation method is simulated and presented the results. INTRODUCTION In the current society, the radio mobile devices are used exponentially day to day and the radio spectrum is finished due to these devices. Many solutions are proposed for effective use of radio spectrum, such as cognitive radio networks. The optical wireless communication (OWC) is another alternative for replacing the radio based wireless communication. Since the optical wireless communication supports higher capacity, which is important for various broadband applications such as HD Televisions, steaming videos, mobile video phones, cloud services, and high-speed internet access, its demand is increased. -

VISUAL SUMMARY Communications and Networks
Rev.Confirming Pages VISUAL SUMMARY Communications and Networks COMMUNICATIONS COMMUNICATION CHANNELS Communications is the process of sharing data, pro- Communication channels carry data from one com- grams, and information between two or more com- puter to another. puters. Applications include e-mail, texting, Internet telephones, and electronic commerce. Physical Connections Physical connections use a solid medium to connect Connectivity sending and receiving devices. Connections include Connectivity is a concept related to using computer twisted pair (telephone lines and Ethernet cables), networks to link people and resources. You can link or coaxial cable, and fiber-optic cable. connect to large computers and the Internet, provid- Wireless Connections ing access to extensive information resources. Wireless connections do not use a solid substance to The Wireless Revolution connect devices. Most use radio waves. Mobile devices like smartphones and tablets have • Bluetooth— transmits data over short distances; brought dramatic changes in connectivity and com- widely used for wireless headsets, printers, and munications. These wireless devices are becoming handheld devices. widely used for computer communication. • Wi-Fi (wireless fidelity)— uses high-frequency radio signals; most home and business wireless Communication Systems networks use Wi-Fi. Communication systems transmit data from one loca- • Microwave— line-of-sight communication; used tion to another. Four basic elements are to send data between buildings; longer distances • Sending and receiving devices require microwave stations. • Communication channel (transmission medium) • WiMax (Worldwide Interoperability for Microwave Access)— extends the range of Wi-Fi • Connection (communication) devices networks using microwave connections. • Data transmission specifications • LTE (Long Term Evolution) —currently has similar performance to WiMax; promises to provide greater speed and quality transmissions in the near future. -

(PAN) Interference and Compatibility Issues for Public Safety Personal Protective Equipment
Research on Personal Area Network (PAN) Interference and Compatibility Issues for Public Safety Personal Protective Equipment Georgetown, South Carolina Fire Department Vigilant Guard Exercise 2015 DHS Research on PAN Networks RF Interference Final Report Document Number: 130200-RPT01 Contract Number: DHS-ST-14-065-FR01 5 August 2015 1 Research Staff Scott Ross, Senior Program Manager Robbie Guest, Senior Electrical Engineer Ed Irwin, Principal Biomedical Engineer Dan Murray, Technical Advisor Peter Bryant, Division Manager, Avionics Systems Behnam Kamali, Ph.D., P.E., Mercer University Professor, Department of Electrical & Computer Engineering Kristin Streilein, Biomedical Engineer Tracy Tillman, Senior Systems Engineer Patrick Hobbs, Technical Communications and Media Technician Deidra Boswell, Biomedical Engineer Tim Maloney, VP for Operations, Guardian Centers Vann Burkart, Program Manager, Guardian Centers Moin Rahman, Principal Scientist, High Velocity Human Factors (HVHF) Sciences DHS S&T Project Lead William Stout, Program Manager, U.S. Department of Homeland Security Science and Technology Directorate First Responders Group i ACKNOWLEDGEMENTS Mercer Engineering Research Center (MERC), a non-profit operating unit of Mercer University, performed this analysis for the Department of Homeland Security (DHS) First Responders Group (FRG) Science and Technology Directorate. MERC was supported in this research by Guardian Centers of Perry, Georgia, Mercer University School of Engineering, and High Velocity Human Factor (HVHF) Sciences. The MERC team extends its deep appreciation to the members of the first responder communities for their cooperation, information, and feedback; their contributions are the foundation of this report. We would like to especially thank the Georgetown South Carolina Fire Department (GTFD) and Emergency Management Agency (EMA) for allowing us to participate in Vigilant Guard 2015. -
Connecting Devices to the Wifi Network
eBOOGUIDEK CONNECTING DEVICES TO THE WIFI NETWORK Quick start guide for residents ©2020 Charter Communications. All rights reserved. GUIDE CONNECTING DEVICES TO THE WIFI NETWORK Table of contents Introduction ........................................................................................................................................................................ 1 Creating your Personal Area Network ...................................................................................................................... 1 Adding new computers, phones and tablets to your network .......................................................................2 Adding devices without Internet browsers to your network ...........................................................................3 FAQs ......................................................................................................................................................................................4 How to get help .................................................................................................................................................................4 Finding your device’s MAC Address ..........................................................................................................................5 enterprise.spectrum.com GUIDE CONNECTING DEVICES TO THE WIFI NETWORK Quick start guide for residents Introduction The following document describes how to connect to the UCSD Graduate & Family Housing WiFi network and create a Personal -
Technology in Action
Technology in Action Alan Evans • Kendall Martin Mary Anne Poatsy Tenth Edition Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall Technology in Action Chapter 5 Networking: Connecting Computing Devices Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall 1 Chapter Topics • Networking Fundamentals • Network Architecture and Components • Connecting to the Internet • Installing and Configuring Home Networks • Securing Wireless Networks Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall 2 Networking Fundamentals • A computer network is two or more computers connected via hardware and software • A node is any device connected to a network – Computer – Peripheral (i.e., a printer) – Network device (i.e., a router) Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall 3 Networking Fundamentals • Facilitates resource sharing – Sharing high-speed Internet connection – Sharing peripheral devices such as printers – Sharing files – Common communications Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall 4 Networking Fundamentals Copyright © 2014 Pearson Education, Inc. Publishing as Prentice Hall 5 Networking Fundamentals • Home networks: After installation, easy to maintain • Large networks need to be administered – Involve initial purchase of equipment – Require network administration • Installing new computers and devices • Monitoring the network’s performance • Updating and installing new software • Configuring network security – Benefits usually outweigh disadvantages