The Parallel Bars Movements with Strain of Bars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

HAWKEYES SOONERS March 20 Penn State State College, Pa
Meet Two | at Iowa | Field House Main Floor (Iowa City, Iowa) | Jan. 23, 2010 | 2 P.M. CT Matthew Wilson, Student Asst. (Men’s Gymnastics) McClendon Center for Intercollegiate Athletics 180 W. Brooks, Suite 2525, Norman, OK 73019 O: (405) 325-8231 | M: (405) 831-3344 | E: [email protected] ® www.SoonerSports.com | Twitter: @soonersportscom 8 NATIONAL TITLES | 6 NISSEN-EMERY AWARD WINNERS | 196 ALL-AMERICANS | 30 INDIV. NATIONAL CHAMPIONS Oklahoma Schedule| Results DATE OPPONENT SITE TIME | RESULTS 8 At A Glance 4 Jan. 16 Rocky Mountain Open Colorado Springs, Colo. (W) 347.400 Date: . Saturday, Jan. 23 Last Meeting . W, OU 354.250 Jan. 23 Iowa Iowa City, Iowa 2 p.m. Time: . 2 p.m. Central Jan. 30 Texas NORMAN 7 p.m. Location . Iowa City, Iowa Feb. 4 Winter Cup Las Vegas, Nev. 7 p.m. Venue: . Field House Main Floor Feb. 13 Nebraska NORMAN 7 p.m. Meet Info . soonersports.com Feb. 20 Michigan Ann Arbor, Mich. 2 p.m. Live Stats: . .N/A Webcast: . N/A Feb. 27 Minnesota NORMAN 7 p.m. Tickets: . 1-800 IA-HAWKS March 7 Nebraska Lincoln, Neb. 7 p.m. Iowa (2-3, 1-3 Big Ten) Oklahoma (4-0, 2-0 MPSF) March 13 Ohio State Columbus, Ohio 2 p.m. HAWKEYES SOONERS March 20 Penn State State College, Pa. 4 p.m. April 3 MPSF Championship NORMAN 7 p.m. No. 4 Set to Battle the Hawkeyes One week after winning the Rocky Mountain Open for the 11th straight season, the fourth-ranked Oklahoma men’s gymnastics April 15 NCAA Qualifiers West Point, N.Y. -

Gymnastics Staff Eight-Time National Champs - 2008 | 2006 | 2005 | 2003 |2002 | 1991 | 1978 | 1977
GYMNASTICS STAFF EIGHT-TIME NATIONAL CHAMPS - 2008 | 2006 | 2005 | 2003 |2002 | 1991 | 1978 | 1977 2009 OKLAHOMA MEN’S GYMNASTICS MEDIA GUIDE | soonersports.com 31 2008 NATIONAL CHAMPIONS HEAD COACH MARK WILLIAMS 10th Year at OU: 223-18 | Alma Mater: Nebraska, 1980 Five National Championships Eight Conference Championships Five-Time National Coach of the Year Eight-Time MPSF Coach of the Year With three NCAA Championships the University of Oklahoma men’s gymnastics program was no stranger to success prior to head coach Mark Williams’ arrival. However, Williams has established OU as the nation’s elite program with five national titles in the last seven years, claiming crowns in 2002, 2003, 2005, 2006 and most recently in 2008. The Sooners have also enjoyed international success with Williams at the helm as he helped train two Olympic medal winners. Jonathan Horton (Beijing 2008) and Guard Young (Athens 2004) represented the U.S. in the last two Olympic Games. Williams was named the head coach at Oklahoma in 2000 and has positioned the program SOONERS UNDER WILLIAMS as a national contender every year with an overall mark of 223-18 (.925) in nine seasons. In addition to the five national titles, the Sooners have recorded three national runner-up Year Record Conference (Finish) Postseason (Finish) finishes under Williams and other gaudy numbers that includes 14 individual national 2000 15-4 MPSF (First) NCAA (Fourth) champions, 92 All-America honors, eight conference team championships, 29 individual 2001 24-2 MPSF (First) NCAA (Second) conference titles and two Nissen Emery Award winners (Jonathan Horton in 2008 and 2002 28-1 MPSF (First) NCAA (First) 2003 26-0 MPSF (First) NCAA (First) Daniel Furney in 2003), presented annually to the nation’s top senior gymnast. -

1298 Kinematic Analysis of Basket with 5/4 Turn To
33rd International Conference on Biomechanics in Sports, Poitiers, France, June 29 - July 3, 2015 Floren Colloud, Mathieu Domalain & Tony Monnet (Editors) Coaching and Sports Activities KINEMATIC ANALYSIS OF BASKET WITH 5/4 TURN TO HANDSTAND OF SHIXIONG ZHOU ON PARALLEL BARS Wei Xie, Jihe Zhou, Shuai Wang Chengdu Sport University, Chengdu, China The basket with 5/4 turn to handstand on parallel bars is a representative movement of E group; in 1896 it is listed as the Olympic Games project. The parallel bars have been one of the Chinese men's gymnastics advantage projects since 1980s. From 1980 to 2011, China's elite athletes Li Yuejiu, Lou Yun, Li Jing, Huang Liping, Zhang Jingjin, Li Xiaopeng and Yang Wei won more than a dozen times world champion on the parallel bars in the world gymnastics competitions. China's athletes can keep long-term advantage of this project status and competitive strength, in addition to keep pace with the times innovation of difficult moves, there is another important reason is to continuously improve the leading trend of action quality. KEY WORDS: Kinematic analysis, Shixiong Zhou, parallel bars. INTRODUCTION: At present, only Chinese gymnast ShiXiong Zhou can complete this action in the world, in the final of the 2012 national gymnastics championships in the parallel bars, ShiXiong Zhou failed to complete the action very well. Therefore, in order to improve the quality of this action, it’s necessary to analyze the action from both qualitative and quantitative aspects. We made a 3D camera resolution on ShiXiong Zhou at the game site, with the three-dimensional analysis we gained the kinematic parameters.Thus to analyze the reasons of errors, which provides theoretical and technical basis for the development and improvement of Chinese athletes. -
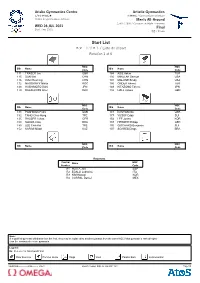
Start List スタートリスト / Liste De Départ Rotation 1 of 6
Ariake Gymnastics Centre Artistic Gymnastics 有明体操競技場 体操競技 / Gymnastique artistique Centre de gymnastique d'Ariake Men's All-Around 男子個人総合 / Concours multiple - hommes WED 28 JUL 2021 Final Start Time 19:15 決勝 / Finale Start List スタートリスト / Liste de départ Rotation 1 of 6 NOC NOC Bib Name Bib Name Code Code 131 FRASER Joe GBR 184 ASIL Adem TUR 115 SUN Wei CHN 192 MIKULAK Samuel USA 116 XIAO Ruoteng CHN 191 MALONE Brody USA 172 NAGORNYY Nikita ROC 186 ONDER Ahmet TUR 146 HASHIMOTO Daiki JPN 149 KITAZONO Takeru JPN 170 DALALOYAN Artur ROC 132 HALL James GBR NOC NOC Bib Name Bib Name Code Code 188 PAKHNIUK Petro UKR 187 KOVTUN Illia UKR 182 TANG Chia-Hung TPE 177 YUSOF Eddy SUI 135 DAUSER Lukas GER 154 LEE Junho KOR 108 SOUZA Caio BRA 137 HERDER Philipp GER 180 LEE Chih Kai TPE 176 GISCHARD Benjamin SUI 152 KARIMI Milad KAZ 107 SOARES Diogo BRA NOC NOC Bib Name Bib Name Code Code Reserves Control Name NOC Number Code R1 PLATA Joel ESP R2 EDALLI Ludovico ITA R3 KIM Hansol KOR R4 CORRAL Daniel MEX Note: If a qualified gymnast withdraws from the final, they may be replaced by another gymnast from the same NOC if that gymnast is ranked higher than the nominated reserve gymnasts Legend: Rx Reserve for All-Around Final Floor Exercise Pommel Horse Rings Vault Parallel Bars Horizontal Bar GARM1AA---------------FNL---------_51E 1 Report Created SUN 25 JUL 2021 8:21 Page 1/6 Ariake Gymnastics Centre Artistic Gymnastics 有明体操競技場 体操競技 / Gymnastique artistique Centre de gymnastique d'Ariake Men's All-Around 男子個人総合 / Concours multiple - hommes WED 28 JUL -

The Xith Olympic Games Berlin, 1936 Official Report Volume II
THE XITH OLYMPIC GAMES BERLIN, 1936 OFFICIAL REPORT VOLUME II BY ORGANISATIONSKOMITEE FÜR DIE XI. OLYMPIADE BERLIN 1936 E.V. PUBLISHED BY WILHELM LIMPERT, BERLIN, S.W. 68 The Dietrich Eckart Open-Air Theatre provided an ideal site for the gymnastic competitions. Gymnastics When the preliminary work for the gymnastic contests was begun in 1933, the circumstance arose that the body concerned, the German Gymnastic Association, did not belong to the International Gymnastic Federation. Individual German gymnasts had competed in earlier Olympic Games, but there had been no official participation of the German Gymnastic Association. Now, in the few years between 1933 and 1936, it was necessary to establish a union with the nations represented in the International Gymnastic Federation. The Gymnastic World Championship contests, held in Budapest in 1934, offered the first opportunity to establish this contact. On the occasion of these contests, Germany, that is, the German Gymnastic Association, was admitted into the International Gymnastic Federation. On this occasion, the German men gymnasts for the first time participated as a group 837 in an international contest, competing against 12 nations. The Olympic Games offered the German women gymnasts their first opportunity to test their ability in an international contest. The problem of the manner in which the gymnastic contests should be carried out was studied in great detail by the Organizing Committee. When it was certain that the Dietrich Eckart Theatre would be constructed, the problem of a suitable contest site was solved. It was then possible to begin the purely technical part of the preparations-the provision of the apparatus, the publication of the exercises, etc. -

Training Parallel Bars
To celebrate its 30th anniversary, GYMNOVA has published this new version which covers all the gymnastics disciplines. You will find many new lines, including our "Help apparatus" range of teaching aids for training. s EDUC’GYM ACROBATIC SPORTS t .......................................................................... n •Wooden range :.............................................................................................. 8 •Large trampolines 72 •Long trampolines ............................................................................... 75 e Ladders t Bases •Mini-trampolines ................................................................................ 76 •Air tracks ............................................................................................................... 78 n •Foam modules ............................................................................................. 10 •"Acroflex" tracks .............................................................................. 79 o •Acrobatics and tumbling tracks .............. 80 c APPARATUS RHYTHMIC •Asymmetric •Springboards ................ 38 GYMNASTICS AND bars ........................................ 14 1 •Parallel bars ....................... 40 5 •Beams .............................. 22 •High barsi ............................... 46 AEROBICS •Floors .............................. 28 •Pommel horses ............ 50 •Rhythmic gymnastics ............................................................ 82 •Vaulting •Rings ................................................... -

2013-14 Men's Gymnastics Media Information
2013-14 Men’s Gymnastics Media Information 2018 MEN’S GYMNASTICS MEDIA INFORMATION 2018 OHIO STATE BUCKEYES Max Andryuschenko Evan Bluemel Joey Bonnano Andrew Brower Michael Chan Chris Coombs Freshman Senior Junior RS-Freshman RS-Freshman RS-Junior Mt. Prospect, Ill. Strongsville, Ohio Fitchburg, Mass. Old Bridge, N.J. Louisville, Ky. Louisville, Ky. Robert Costea Trevor Cummings Seth Delbridge Samuel DeWitt Jake Eisenman Josh Hurwitz Sophomore Freshman Senior RS-Junior Freshman RS-Junior Charlotte, N.C. Terry Town, La. Floyds Knobs, Ind. Annapolis, Md. Irvine, Calif. Solon, Ohio Tristan Lopez Paris McGee Jr. Sean Melton Sean Neighbarger Josh Seltzer Joey Smith Freshman RS-Junior RS-Senior Freshman Freshman RS-Sophomore Irvine, Calif. New Haven, Conn. Orlando, Fla. Virginia Beach, Va. Deerfield, Ill. Columbus, Ohio Coleson Stodghill David Szarvas Meyer Williams Alexander Wilson Alec Yoder Jacob Gricar Sophomore RS-Junior Senior RS-Junior Junior Freshman Evergreen, Co. Shreveport, La. Dallas, Texas Sugar Land, Texas Indianapolis, Ind. Wickliffe, Ohio Joey Wilmot Freshman Littleton, Colo. 2 2018 MEN’S GYMNASTICS MEDIA INFORMATION 2017-18 ROSTER NAME POS. HT. YR. HOMETOWN (PREVIOUS SCHOOL) Max Andryushchenko AA 5-9 FR Mt, Prospect, Ill. (Prospect High School) Evan Bluemel PH 5-7 SR Strongsville, Ohio (Strongsville High School) Joey Bonanno FX, V 5-3 JR Fitchburg, Mass. (Oakmont Regional High School) Andrew Brower AA 5-10 RS FR Old Bridge, N.J. (Old Bridge High School) Michael Chan AA 5-9 RS FR Louisville, Ky. (Trinity High School) Chris Coombs FX,PB, PH, R 5-2 RS JR Louisville, Ky. (Eastern High School) Robert Costea PH, SR 5-4 SO Charlotte, N.C. -

34Th World Championships Artistic Gymnastics Teams Finals
34th World Championships Artistic Gymnastics Tianjin (CHN) October 9 - 16, 1999 Teams Finals - Men, Oct 12, 1999 Men's Team Finals Fed FX PH SR VT PB HB Total 1 China CHN 38.012 38.324 38.649 38.549 38.787 38.074 230.395 2 Russia RUS 37.624 38.799 37.361 38.649 38.187 37.525 228.145 3 Belarus BLR 37.599 37.862 38.424 37.586 38.186 37.974 227.631 4 Japan JPN 36.161 38.199 37.962 38.287 37.637 37.662 225.908 5 Korea KOR 36.374 37.625 37.737 38.286 38.124 37.724 225.87 6 United States USA 36.912 37.974 37.711 37.75 37.137 37.712 225.196 Individual AA Finals - Men, Oct 14, 1999 AA Finals Fed FX PH SR VT PB HB Total 1 KRUKOV Nikolay RUS 9.437 9.612 9.362 9.725 9.712 9.637 57.485 2 TSUKAHARA Naoya JPN 9.5 9.55 9.35 9.612 9.675 9.65 57.337 3 JOVTCHEV Jordan BUL 9.712 9.6 9.6 9.45 9.35 9.5 57.212 4 WILSON Blaine USA 9.6 9.487 9.325 9.687 9.612 9.5 57.211 5 LU Yufu CHN 9.125 9.625 9.537 9.737 9.537 9.525 57.086 6 NEMOV Alexei RUS 9.725 9.725 8.737 9.637 9.537 9.612 56.973 7 LEE Joo-Hyung KOR 9.287 9.437 9.325 9.512 9.65 9.625 56.836 8 BERESCH Olexandr UKR 9.4 9.637 8.912 9.65 9.525 9.662 56.786 9 ZOZULIA Roman UKR 8.937 9.637 9.412 9.587 9.625 9.575 56.773 10 BONDARENKO Alexei RUS 9.725 9.375 9.45 9.2 9.6 9.387 56.737 11 HUANG Xu CHN 8.987 9.637 9.512 9.562 9.725 9.237 56.66 12 YANG Wei CHN 9.612 8.6 9.487 9.662 9.6 9.612 56.573 13 WECKER Andreas GER 9.062 9.537 9.475 9.062 9.65 9.587 56.373 14 MAREE Florent FRA 9.45 9.425 8.987 9.275 9.425 9.5 56.062 15 SAITO Yoshiro JPN 9.225 9.475 9.35 9.4 8.95 9.6 56 16 SVETLICHNYI Olexandr UKR 9.087 9.612 -

Male Artistic Gymnastics Written Routines
MEN’S ARTISTIC GYMNASTICS ROUTINES 2019-2027 WRITTEN TEXT LEVEL A Floor Exercise P. 2 Vault P. 2 Parallel Bars P. 3 Horizontal Bar P. 3 LEVEL B Floor Exercise P. 4 Pommel Horse P. 4 Vault P. 5 Horizontal Bar P. 5 LEVEL C Floor Exercise P. 6 Pommel Horse P. 6 Vault P. 7 Horizontal Bar P. 8 LEVEL 1 Floor Exercise P. 9 Pommel Horse P. 10 Vault P. 10 Still Rings P. 11 Parallel Bars P. 12 Horizontal Bar P. 12 LEVEL 2 Floor Exercise P. 13 Pommel Horse P. 13 Vault P. 14 Still Rings P. 14 Parallel Bars P. 15 Horizontal Bar P. 15 LEVEL 3 Floor Exercise P. 16 Pommel Horse P. 16 Vault P. 16 Still Rings P. 17 Parallel Bars P. 18 Horizontal Bar P. 18 LEVEL 4 Floor Exercise P. 19 Pommel Horse P. 19 Vault P. 19 Still Rings P. 20 Parallel Bars P. 20 Horizontal Bar P.20 1 LEVEL A FLOOR EXERCISE – LEVEL A May be performed on the floor, with a wedge mat, in a wheelchair, or with a walker. Optional/Voluntary Choreography, including these reQuirements: Value Element 2.0 Salute at beginning of routine 1.0 Beginning pose 2.0 1-2 log rolls or optional movements in wheelchair or walker 1.0 Ending pose 2.0 Salute at end of routine Difficulty 8.0 Execution 2.0 Max. score 10.0 VAULT – LEVEL A The video is the official version. This written text is merely an additional teaching tool. * Spotter required May be performed in a wheelchair or with a walker (or other assistance) Value Element 2.0 Salute to judge 2.0 Move to a designated point 2.0 “Stick” landing 2.0 Salute to judge Difficulty 8.0 Execution 2.0 Max. -
GYMNASTICS MULTIDISCIPLINE TEAM EVENT Gymnastics
Official Results Book GYMNASTICS MULTIDISCIPLINE TEAM EVENT Gymnastics Multidiscipline Team Event Competition Schedule As of 8 OCT 2018 Start Gymnastics Date Event Details Time Discipline SUN 07 OCT Session 1 of 12 14:03 Artistic Men's Qualification and Multidiscipline Team Pommel Horse 14:04 Artistic Women's Qualification and Multidiscipline Team Floor Exercice 14:49 Acrobatic Mixed Pair Qualification and Multidiscipline Team Dynamic Exercise Session 2 of 12 19:03 Acrobatic Mixed Pair Qualification and Multidiscipline Team Balance Exercise 19:06 Artistic Men's Qualification and Multidiscipline Team Floor Exercice 21:11 Acrobatic Mixed Pair Qualification and Multidiscipline Team Combined Exercise MON 08 OCT Session 3 of 12 14:03 Artistic Men's Qualification and Multidiscipline Team Rings 14:04 Trampoline Women's Qualification and Multidiscipline Team First and second routines 14:05 Artistic Women's Qualification and Multidiscipline Team Vault Session 4 of 12 19:03 Artistic Men's Qualification and Multidiscipline Team Vault 19:05 Trampoline Men's Qualification and Multidiscipline Team First and second routines TUE 09 OCT Session 5 of 12 14:05 Rhythmic Individual All-Around and Multidiscipline Team Hoop 14:07 Artistic Women's Qualification and Multidiscipline Team Uneven Bars Session 6 of 12 19:05 Rhythmic Individual All-Around and Multidiscipline Team Ball 19:07 Artistic Men's Qualification and Multidiscipline Team Parallel Bars WED 10 OCT Session 7 of 12 14:03 Rhythmic Individual All-Around and Multidiscipline Team Clubs 14:05 Artistic -

Source : Bibliothèque Du CIO / IOC Library
The A.I.B.A. nominated 42 referees and judges from 18 countries. Finland's small share was 2 referees and 2 judges. BOXING Referees worked competently on the whole. Differences of opinion between several of the judges unfortunately led to decisions which aroused dissatisfaction and in the opinion of In all 44 countries sent 240 boxers to compete in the new weights, ten instead of the former experts were mistaken. In its memorandum the A.I.B.A. attributes this to incompetence, eight, ordered by the Association Internationale de Boxe Amateur. The record number but some judges gave grounds for allegations of downright partiality. of entries was in part due to the larger number of weights. It is to be noted, however, that Under the A.I.B.A. rules in force no competitor was entitled to two successive walkovers. more countries were represented than ever before. Newcomers to the Olympic boxing This rule compelled new draws in two weights. As luck would have it, the Swedish heavy ring were the U.S.S.R., Bulgaria, the Saar, Yugoslavia, Venezuela and Vietnam. weight Johansson and the flyweight Mazumdar of India, after drawing byes in the first As recommended by the A.I.B.A., Gold and Silver Medals only were awarded. The round would have gone on without a bout from the second through retirement of their losers in the semi-finals were not, as previously, matched for Bronze Medals; instead, both opponents. In the bantamweight class a new draw had to be made after the weigh-in because were awarded diplomas. -

Judges Assignment Day 2
49th FIG Artistic Gymnastics World Championships Stuttgart (GER), 4 October - 13 October 2019 Apparatus Finals SUN 13 OCT 2019 Judges Assignments Day 2 of 2 Men Women Superior Jury: Superior Jury: MICKEVICS Arturs FIG President SACCHI Donatella FIG President SOUSA Alvaro FIG Member ANDRIANOVA Liubov FIG Member THOMSON Jeffrey FIG Floor Exercise Supervisor SEILE Nadezda FIG Member HUANG Liping FIG Pommel Horse Supervisor GRATT Johanna FIG Vault Supervisor TOMBS Andrew FIG Rings Supervisor ZHOU Qiurui FIG Uneven Bars Supervisor TOMITA Hiroyuki FIG Vault Supervisor DAVYDOVA Elena FIG Balance Beam Supervisor MARCOS FELIPE Julio FIG Parallel Bars Supervisor DOWDELL Kym FIG Floor Exercise Supervisor ALBRECHT Holger FIG Horizontal Bar Supervisor NOC NOC Function Name Function Name Code Code D1 ALIYEV Rza AZE D1 MIHAILESCU GRIGORAS Anca ROU D2 GAZIT Ilan ISR D2 ZAYED Nehad EGY E1 SCHEDLER Andreas AUT E1 RATYNSKA-BURY Maria Anna POL E2 ORTIZ LOPEZ Juan F PUR E2 DAVIRAN CUEVA Melissa Dina PER E3 CORBITT Jonathan USA E3 McMURDO Michelle Jane AUS E4 LI Jing CHN E4 SONG Eun Young KOR E5 SOLIMAN Mohamed EGY E5 VARMUZKOVA Pavla CZE ER1 HODZIC LEDERER Enes SLO ER1 OMELIANCHYK-ZIURKALOV Oksana UKR ER2 DONOGHUE Denis IRL ER2 KIRYASHOVA Vera RUS Line Judge KIM Alexandr KAZ Time Judge 1 VERKOOIJEN Chantal NED Time Judge 2 OMORI Tomoko JPN NOC NOC Function Name Function Name Code Code D1 HADJI Mohammed Smail ALG D1 LISKAROVA Hana CZE D2 ZUNICH Butch Andreja USA D2 IOANNOU Maria CYP E1 COUSSEMENT Alain BEL E1 SLIUSARCHUK Oksana UKR E2 YUEN Ka Keung HKG E2