Measuring Angles and Angular Resolution
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Journal of Interdisciplinary Science Topics Determining Distance Or
Journal of Interdisciplinary Science Topics Determining Distance or Object Size from a Photograph Chuqiao Huang The Centre for Interdisciplinary Science, University of Leicester 19/02/2014 Abstract The purpose of this paper is to create an equation relating the distance and width of an object in a photograph to a constant when the conditions under which the photograph was taken are known. These conditions are the sensor size of the camera and the resolution and focal length of the picture. The paper will highlight when such an equation would be an accurate prediction of reality, and will conclude with an example calculation. Introduction may be expressed as a tan (opposite/adjacent) In addition to displaying visual information relationship: such as colour, texture, and shape, a photograph (1.0) may provide size and distance information on (1.1) subjects. The purpose of this paper is to develop such an equation from basic trigonometric principles when given certain parameters about the photo. Picture Angular Resolution With the image dimensions, we can make an Picture Field of View equation for one-dimensional angular resolution. First, we will determine an equation for the Since l2 describes sensor width and not height, we horizontal field of view of a photograph when given will calculate horizontal instead of vertical angular the focal length and width of the sensor. resolution: Consider the top down view of the camera (2.0) system below (figure 1), consisting of an object (left), lens (centre), and sensor (right). Let d be the (2.1) 1 distance of object to the lens, d2 be the focal length, Here, αhPixel is the average horizontal field of l1 be the width of the object, l2 be the width of the view for a single pixel, and nhPixel is the number of sensor, and α be the horizontal field of view of the pixels that make up a row of the picture. -

Sub-Airy Disk Angular Resolution with High Dynamic Range in the Near-Infrared A
EPJ Web of Conferences 16, 03002 (2011) DOI: 10.1051/epjconf/20111603002 C Owned by the authors, published by EDP Sciences, 2011 Sub-Airy disk angular resolution with high dynamic range in the near-infrared A. Richichi European Southern Observatory,Karl-Schwarzschildstr. 2, 85748 Garching, Germany Abstract. Lunar occultations (LO) are a simple and effective high angular resolution method, with minimum requirements in instrumentation and telescope time. They rely on the analysis of the diffraction fringes created by the lunar limb. The diffraction phenomen occurs in space, and as a result LO are highly insensitive to most of the degrading effects that limit the performance of traditional single telescope and long-baseline interferometric techniques used for direct detection of faint, close companions to bright stars. We present very recent results obtained with the technique of lunar occultations in the near-IR, showing the detection of companions with very high dynamic range as close as few milliarcseconds to the primary star. We discuss the potential improvements that could be made, to increase further the current performance. Of course, LO are fixed-time events applicable only to sources which happen to lie on the Moon’s apparent orbit. However, with the continuously increasing numbers of potential exoplanets and brown dwarfs beign discovered, the frequency of such events is not negligible. I will list some of the most favorable potential LO in the near future, to be observed from major observatories. 1. THE METHOD The geometry of a lunar occultation (LO) event is sketched in Figure 1. The lunar limb acts as a straight diffracting edge, moving across the source with an angular speed that is the product of the lunar motion vector VM and the cosine of the contact angle CA. -

Circle Theorems
Circle theorems A LEVEL LINKS Scheme of work: 2b. Circles – equation of a circle, geometric problems on a grid Key points • A chord is a straight line joining two points on the circumference of a circle. So AB is a chord. • A tangent is a straight line that touches the circumference of a circle at only one point. The angle between a tangent and the radius is 90°. • Two tangents on a circle that meet at a point outside the circle are equal in length. So AC = BC. • The angle in a semicircle is a right angle. So angle ABC = 90°. • When two angles are subtended by the same arc, the angle at the centre of a circle is twice the angle at the circumference. So angle AOB = 2 × angle ACB. • Angles subtended by the same arc at the circumference are equal. This means that angles in the same segment are equal. So angle ACB = angle ADB and angle CAD = angle CBD. • A cyclic quadrilateral is a quadrilateral with all four vertices on the circumference of a circle. Opposite angles in a cyclic quadrilateral total 180°. So x + y = 180° and p + q = 180°. • The angle between a tangent and chord is equal to the angle in the alternate segment, this is known as the alternate segment theorem. So angle BAT = angle ACB. Examples Example 1 Work out the size of each angle marked with a letter. Give reasons for your answers. Angle a = 360° − 92° 1 The angles in a full turn total 360°. = 268° as the angles in a full turn total 360°. -

The Most Important Equation in Astronomy! 50
The Most Important Equation in Astronomy! 50 There are many equations that astronomers use L to describe the physical world, but none is more R 1.22 important and fundamental to the research that we = conduct than the one to the left! You cannot design a D telescope, or a satellite sensor, without paying attention to the relationship that it describes. In optics, the best focused spot of light that a perfect lens with a circular aperture can make, limited by the diffraction of light. The diffraction pattern has a bright region in the center called the Airy Disk. The diameter of the Airy Disk is related to the wavelength of the illuminating light, L, and the size of the circular aperture (mirror, lens), given by D. When L and D are expressed in the same units (e.g. centimeters, meters), R will be in units of angular measure called radians ( 1 radian = 57.3 degrees). You cannot see details with your eye, with a camera, or with a telescope, that are smaller than the Airy Disk size for your particular optical system. The formula also says that larger telescopes (making D bigger) allow you to see much finer details. For example, compare the top image of the Apollo-15 landing area taken by the Japanese Kaguya Satellite (10 meters/pixel at 100 km orbit elevation: aperture = about 15cm ) with the lower image taken by the LRO satellite (0.5 meters/pixel at a 50km orbit elevation: aperture = ). The Apollo-15 Lunar Module (LM) can be seen by its 'horizontal shadow' near the center of the image. -

Angles ANGLE Topics • Coterminal Angles • Defintion of an Angle
Angles ANGLE Topics • Coterminal Angles • Defintion of an angle • Decimal degrees to degrees, minutes, seconds by hand using the TI-82 or TI-83 Plus • Degrees, seconds, minutes changed to decimal degree by hand using the TI-82 or TI-83 Plus • Standard position of an angle • Positive and Negative angles ___________________________________________________________________________ Definition: Angle An angle is created when a half-ray (the initial side of the angle) is drawn out of a single point (the vertex of the angle) and the ray is rotated around the point to another location (becoming the terminal side of the angle). An angle is created when a half-ray (initial side of angle) A: vertex point of angle is drawn out of a single point (vertex) AB: Initial side of angle. and the ray is rotated around the point to AC: Terminal side of angle another location (becoming the terminal side of the angle). Hence angle A is created (also called angle BAC) STANDARD POSITION An angle is in "standard position" when the vertex is at the origin and the initial side of the angle is along the positive x-axis. Recall: polynomials in algebra have a standard form (all the terms have to be listed with the term having the highest exponent first). In trigonometry, there is a standard position for angles. In this way, we are all talking about the same thing and are not trying to guess if your math solution and my math solution are the same. Not standard position. Not standard position. This IS standard position. Initial side not along Initial side along negative Initial side IS along the positive x-axis. -

Understanding Resolution Diffraction and the Airy Disk, Dawes Limit & Rayleigh Criterion by Ed Zarenski [email protected]
Understanding Resolution Diffraction and The Airy Disk, Dawes Limit & Rayleigh Criterion by Ed Zarenski [email protected] These explanations of terms are based on my understanding and application of published data and measurement criteria with specific notation from the credited sources. Noted paragraphs are not necessarily quoted but may be summarized directly from the source stated. All information if not noted from a specific source is mine. I have attempted to be as clear and accurate as possible in my presentation of all the data and applications put forth here. Although this article utilizes much information from the sources noted, it represents my opinion and my understanding of optical theory. Any errors are mine. Comments and discussion are welcome. Clear Skies, and if not, Cloudy Nights. EdZ November 2003, Introduction: Diffraction and Resolution Common Diffraction Limit Criteria The Airy Disk Understanding Rayleigh and Dawes Limits Seeing a Black Space Between Components Affects of Magnitude and Color Affects of Central Obstruction Affect of Exit Pupil on Resolution Resolving Power Resolving Power in Extended Objects Extended Object Resolution Criteria Diffraction Fringes Interfere with Resolution Magnification is Necessary to See Acuity Determines Magnification Summary / Conclusions Credits 1 Introduction: Diffraction and Resolution All lenses or mirrors cause diffraction of light. Assuming a circular aperture, the image of a point source formed by the lens shows a small disk of light surrounded by a number of alternating dark and bright rings. This is known as the diffraction pattern or the Airy pattern. At the center of this pattern is the Airy disk. As the diameter of the aperture increases, the size of the Airy disk decreases. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Computation and Validation of Two-Dimensional PSF Simulation
Computation and validation of two-dimensional PSF simulation based on physical optics K. Tayabaly1,2, D. Spiga1, G. Sironi1, R.Canestrari1, M.Lavagna2, G. Pareschi1 1 INAF/Brera Astronomical Observatory, Via Bianchi 46, 23807 Merate, Italy 2 Politecnico di Milano, Via La Masa 1, 20156 Milano, Italy ABSTRACT The Point Spread Function (PSF) is a key figure of merit for specifying the angular resolution of optical systems and, as the demand for higher and higher angular resolution increases, the problem of surface finishing must be taken seriously even in optical telescopes. From the optical design of the instrument, reliable ray-tracing routines allow computing and display of the PSF based on geometrical optics. However, such an approach does not directly account for the scattering caused by surface microroughness, which is interferential in nature. Although the scattering effect can be separately modeled, its inclusion in the ray-tracing routine requires assumptions that are difficult to verify. In that context, a purely physical optics approach is more appropriate as it remains valid regardless of the shape and size of the defects appearing on the optical surface. Such a computation, when performed in two-dimensional consideration, is memory and time consuming because it requires one to process a surface map with a few micron resolution, and the situation becomes even more complicated in case of optical systems characterized by more than one reflection. Fortunately, the computation is significantly simplified in far-field configuration, since the computation involves only a sequence of Fourier Transforms. In this paper, we provide validation of the PSF simulation with Physical Optics approach through comparison with real PSF measurement data in the case of ASTRI-SST M1 hexagonal segments. -

Modern Astronomical Optics 1
Modern Astronomical Optics 1. Fundamental of Astronomical Imaging Systems OUTLINE: A few key fundamental concepts used in this course: Light detection: Photon noise Diffraction: Diffraction by an aperture, diffraction limit Spatial sampling Earth's atmosphere: every ground-based telescope's first optical element Effects for imaging (transmission, emission, distortion and scattering) and quick overview of impact on optical design of telescopes and instruments Geometrical optics: Pupil and focal plane, Lagrange invariant Astronomical measurements & important characteristics of astronomical imaging systems: Collecting area and throughput (sensitivity) flux units in astronomy Angular resolution Field of View (FOV) Time domain astronomy Spectral resolution Polarimetric measurement Astrometry Light detection: Photon noise Poisson noise Photon detection of a source of constant flux F. Mean # of photon in a unit dt = F dt. Probability to detect a photon in a unit of time is independent of when last photon was detected→ photon arrival times follows Poisson distribution Probability of detecting n photon given expected number of detection x (= F dt): f(n,x) = xne-x/(n!) x = mean value of f = variance of f Signal to noise ration (SNR) and measurement uncertainties SNR is a measure of how good a detection is, and can be converted into probability of detection, degree of confidence Signal = # of photon detected Noise (std deviation) = Poisson noise + additional instrumental noises (+ noise(s) due to unknown nature of object observed) Simplest case (often -

Classify Each Triangle by Its Side Lengths and Angle Measurements
GRADE 4 | MODULE 4 | TOPIC D | LESSONS 12–16 KEY CONCEPT OVERVIEW In Lessons 12 through 16, students explore lines of symmetry and characteristics of triangles and quadrilaterals. You can expect to see homework that asks your child to do the following: ▪ Find and draw lines of symmetry. ▪ Given half of a figure and the line of symmetry, draw the other half of the figure. ▪ Classify triangles by side lengths (e.g., equilateral, isosceles, scalene) and by angle measurements (e.g., acute, right, obtuse). ▪ Draw triangles that fit different classifications (e.g., acute and scalene). ▪ Name quadrilaterals, identify attributes (i.e., characteristics) that define them, and construct them based on given attributes. SAMPLE PROBLEM (From Lesson 13) Classify each triangle by its side lengths and angle measurements. Circle the correct names. Additional sample problems with detailed answer steps are found in the Eureka Math Homework Helpers books. Learn more at GreatMinds.org. For more resources, visit » Eureka.support GRADE 4 | MODULE 4 | TOPIC D | LESSONS 12–16 HOW YOU CAN HELP AT HOME ▪ Ask your child to look around the house for objects that have lines of symmetry. Examples include the headboard of a bed, dressers, chairs, couches, and place mats. Ask him to show where the line of symmetry would be and what makes it a line of symmetry. Be careful of objects such as doors and windows. They could have a line of symmetry, but if there’s a knob or crank on just one side, then they are not symmetrical. ▪ Ask your child to name and draw all the quadrilaterals she can think of (e.g., square, rectangle, parallelogram, trapezoid, and rhombus). -

Beat the Rayleigh Limit: OAM Based Super-Resolution Diffraction Tomography
Beat the Rayleigh limit: OAM based super-resolution diffraction tomography Lianlin Li1 and Fang Li2 1Center of Advanced Electromagnetic Imaging, Department of Electronics, Peking University, Beijing 100871, China 2 Institute of Electronics, CAS, Beijing 100190, China This letter is the first to report that a super-resolution imaging beyond the Rayleigh limit can be achieved by using classical diffraction tomography (DT) extended with orbital angular momentum (OAM), termed as OAM based diffraction tomography (OAM-DT). It is well accepted that the orbital angular momentum (OAM) provides additional electromagnetic degrees of freedom. This concept has been widely applied in science and technology. In this letter we revisit the DT problem extended with OAM, demonstrate theoretically and numerically that there is no physical limits on imaging resolution in principle by the OAM-DT. This super-resolution OAM-DT imaging paradigm, has no requirement for evanescent fields, subtle focusing lens, complicated post- processing, etc., thus provides a new approach to realize the wavefield imaging of universal objects with sub-wavelength resolution. In 1879 Lord Rayleigh formulated a criterion that a conventional imaging system cannot achieve a resolution beyond that of the diffraction limit, i.e., the Rayleigh limit. Such a “physical barrier” characters the minimum separation of two adjacent objects that an imaging system can resolve. In the past decade numerous efforts have been made to achieve imaging resolution beyond that of Rayleigh limit. Among various proposals dedicated to surpass this “barrier”, a representative example is the well-known technique of near-field imaging, an essential sub-wavelength imaging technology. Near-field imaging relies on the fact that the evanescent component carries fine details of the electromagnetic field distribution at the immediate vicinity of probed objects [1]. -
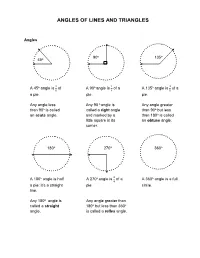
Angles of Lines and Triangles
ANGLES OF LINES AND TRIANGLES Angles 90o 135o 45o o 1 o 1 o 3 A 45 angle is of A 90 angle is of a A 135 angle is of a 8 4 8 a pie. pie. pie. Any angle less Any 90 o angle is Any angle greater than 90o is called called a right angle than 90o but less an acute angle. and marked by a than 180o is called little square in its an obtuse angle. corner. 180o 270o 360o o o 3 o A 180 angle is half A 270 angle is of a A 360 angle is a full 4 a pie: it’s a straight pie. circle. line. Any 180o angle is Any angle greater than called a straight 180o but less than 360o angle. is called a reflex angle. Lines 1. Two lines are parallel ( II ) when they run next to each other but never touch. 2. Two lines are perpendicular ( _ ) when they cross at a right angle. 3. Two intersecting lines always form four angles. The sum of these angles is 360o. ao + xo + bo + yo = 360o x a b y 4. The opposite angles created by intersecting lines are always equal: a=b, x=y. 2ao + 2xo = 360o 5. Two perpendicular intersecting lines always form four 900 (“right”) angles. a x y b 6. If the sum of any two angles equals 180o, those angles are supplementary. If you know either one of them, you can find the other by subtracting the first from 180o. a x 130 x a + x = 180 130 + x = 180 180-130 = 50 x = 50o 7.