Andrea Manni
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Elezioni Regionali 2005 Data Di Stampa 06-Apr-05 13:02:05
ELEZIONI REGIONALI 2005 DATA DI STAMPA 06-APR-05 13:02:05 LISTA avente il contrassegno UDEUR POPOLARI Circoscrizione di : BARI NUMERO CANDIDATO VOTI ORDINE CIRCOSCRIZIONE 2 CANONICO NICOLA 4.378 12 PISICCHIO ALFONSINO DETTO ALFONSO 4.276 11 PICCIARIELLO MICHELE 2.422 9 LEPORE MARIO 2.383 8 GENCO PIETRO 1.240 4 CARNEVALE ROSA DETTA ROSSELLA 992 18 VALENTE STEFANO 961 10 LONGANO TOMMASO 765 3 CARBONARA GIOVANNI 225 1 ANGIULI TRIFONE 175 7 GALATOLA GIUSEPPE 141 5 CLARIZIO ANTONIO 137 6 DE MARINIS ORLANDO 111 17 SIMONE MAURO 106 13 RAGONESE PIERLUIGI 22 16 SCARINGI SIMONA 15 15 SANTANGELO LUIGI 5 14 RENZO MARIA 0 TOTALI 18.354 Pagina 1 di 97 ELEZIONI REGIONALI 2005 DATA DI STAMPA 06-APR-05 13:02:05 LISTA avente il contrassegno UDEUR POPOLARI Circoscrizione di : BARLETTA-ANDRIA-TRANI NUMERO CANDIDATO VOTI ORDINE CIRCOSCRIZIONE 2 SANTANGELO LUIGI 2.201 3 VITOBELLO MARIAGRAZIA FRANCESCA 1.978 4 BALDINI DOMENICO 1.693 1 di FEO NICOLA 1.211 5 DE TOMA MICHELE 116 6 GUSMAN - DORONZO LOREDANA 43 TOTALI 7.242 Pagina 2 di 97 ELEZIONI REGIONALI 2005 DATA DI STAMPA 06-APR-05 13:02:05 LISTA avente il contrassegno UDEUR POPOLARI Circoscrizione di : BRINDISI NUMERO CANDIDATO VOTI ORDINE CIRCOSCRIZIONE 1 MASELLA FRANCESCO 670 5 SEMERARO FRANCESCO 459 2 CONTE FRANCESCANTONIO DETTO CICCIO 357 6 BARLETTA VITO 257 3 LENZITTI GIOVANNI 115 7 TASCO COSIMO 53 4 NACCI GIUSEPPE 5 TOTALI 1.916 Pagina 3 di 97 ELEZIONI REGIONALI 2005 DATA DI STAMPA 06-APR-05 13:02:05 LISTA avente il contrassegno UDEUR POPOLARI Circoscrizione di : FOGGIA NUMERO CANDIDATO VOTI ORDINE CIRCOSCRIZIONE -

PROGETTO Di PIANO DI BACINO STRALCIO ASSETTO IDROGEOLOGICO (PAI) ELENCO ELABORATI
Autorità di Bacino della Puglia PROGETTO di PIANO DI BACINO STRALCIO ASSETTO IDROGEOLOGICO (PAI) Innovazione per i territori dei comuni di Alliste, Aradeo, Lequile, Muro Leccese, Nardò, Patù, Ruffano, Taurisano, della Provincia di Lecce ai sensi della Sentenza del TSAP n. 127/09, e del territorio del Comune di Maruggio, della Provincia di Taranto, ai sensi della sentenza n. 128/09 del TSAP ELENCO ELABORATI Redatto con la collaborazione di: Prof. Umberto Fratino Prof. Vito Iacobellis Geol. Daniela Alemanno Geol. Luca Buzzanca Geol. Tiziana Caggiano Ing. Domenico Denora Ing. Andrea Doria Geol. Antonello Fiore Ing. Valeria A. Intini Geol. Ilaria Maracchione Geol. Maria Teresa Palermo Geol. Nicola Palumbo Ing. Daniele Sgaramella Arch. Donato Stefanelli Il Segretario Generale Prof. Antonio Rosario Di Santo ELABORATO 11 Revisione Febbraio 2015 ELENCO DEGLI ELABORATI ELABORATO_00 - Relazione di Sintesi ELABORATO_01 - Relazione Generale di Progetto di Piano ELABORATO_02.1 - Reticolo Idrografico del Comune di Alliste ELABORATO_02.2 - Perimetrazione a diversa Pericolosità Idraulica del Comune di Alliste ELABORATO_02.3 - Perimetrazione a diversa Pericolosità Geomorfologica del Comune di Alliste ELABORATO_03.1 - Reticolo Idrografico del Comune di Aradeo ELABORATO_03.2 - Perimetrazione a diversa Pericolosità Idraulica del Comune di Aradeo ELABORATO_03.3 - Perimetrazione a diversa Pericolosità Geomorfologica del Comune di Aradeo ELABORATO_04.1 - Reticolo Idrografico del Comune di Lequile ELABORATO_04.2 - Perimetrazione a diversa Pericolosità Idraulica -
Comune Di Lequile Prov
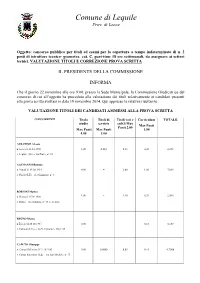
Comune di Lequile Prov. di Lecce Oggetto: concorso pubblico per titoli ed esami per la copertura a tempo indeterminato di n. 2 posti di istruttore tecnico- geometra cat. C, part-time 18 ore settimanali, da assegnare ai settori tecnici. VALUTAZIONE TITOLI E CORREZIONE PROVA SCRITTA IL PRESIDENTE DELLA COMMISSIONE INFORMA Che il giorno 22 novembre alle ore 9:00, presso la Sede Municipale, la Commissione Giudicatrice del concorso di cui all’oggetto ha proceduto alla valutazione dei titoli relativamente ai candidati presenti alla prova scritta svoltasi in data 19 novembre 2014. Qui appresso le relative risultanze : VALUTAZIONE TITOLI DEI CANDIDATI AMMESSI ALLA PROVA SCRITTA CONCORRENTI Titolo Titoli di Titoli vari e Curriculum TOTALE studio servizio cult.li Max Max Punti Punti 2,00 Max Punti Max Punti 1,00 4,00 3,00 ALBANESE Alessio n. Lecce il 23.12.1980 1,00 0,048 0,85 0,20 2,098 r. Lequile (LE) – via Piave, n° 30 ALEMANNO Romina n. Nardò il 15.02.1981 4,00 = 2,00 1,00 7,000 r. Nardò (LE) – via Giannone, n° 3 BORIONI Matteo 1,00 = 1,30 0,20 2,500 n. Roma il 15.04.1980 r. Roma – via Arduino, n° 11 sc. E int.6 BRUNO Mattia n.Tricase il 28.08.1987 0,00 = = 0,10 0,100 r. Taviano (LE) – c.so V. Emanuele III,n° 35 CAPUTO Giuseppe n. Campi Salentina il 21.10.1983 0,00 0,0060 0,65 0,10 0,7560 r. Campi Salentina (LE) – via San Michele, n° 11 Comune di Lequile Prov. -

Comune Di Lequile Prov
Comune di Lequile Prov. di Lecce Oggetto: concorso pubblico per titoli ed esami per la copertura a tempo indeterminato di n. 1 posto di istruttore amministrativo cat. C, part-time 18 ore settimanali, da assegnare al settore AA.GG - servizi demografici . VALUTAZIONE TITOLI E CORREZIONE PROVA SCRITTA IL PRESIDENTE DELLA COMMISSIONE INFORMA Che la Commissione Giudicatrice del concorso di cui all’oggetto ha concluso in data 06.12.2014 la valutazione dei titoli relativamente ai candidati presenti alla prova scritta svoltasi in data 29 novembre 2014. Qui appresso le relative risultanze : N CONCORRENTE Luogo di Data di Titoli Titoli Titoli Curriculum Tot. nascita nascita di di vari e studio servizio culturali 1 Afrune Roberto Poggiardo 22/08/1988 2 0 0 0,1 2,1 2 Anelli Denis Manerbio 20/06/1985 4 0 0 0 4 3 Antonaci Antonia Poggiardo 29/03/1990 2 0 0 0 2 San Cesario Di 4 Antonucci Barbara Lcce 09/09/1983 0 0 0 0 5 Aramini Antonio Cosenza 29/11/1987 2 0 0 0,1 6 Baldari Flavia Galatina 11/12/1983 4 0 1,5 0 5,5 7 Barone Eleonora Galatina 01/06/1984 4 0 1,5 0,1 5,6 8 Bevilacqua Pasquale Dusseldorf 27/05/1985 0 0 0 0 0 San Cesario di 9 Bianco Francesca Lecce 05/07/1991 4 0 0 0,1 4,1 Bitonti Daniela 10 Costanza Mesagne 12/07/1976 4 0 1,5 0 5,5 11 Brunetti Federica Manduria 24/05/1986 4 0 0,1 0 4,1 12 Buttazzo Irene Lecce 12/07/1984 4 4 San Cesario di 13 Cafaro Roberta Lecce 07/06/1980 4 1,5 5,5 14 Calabrese Vittoria Lecec 16/09/1991 1 1 15 Calcagnile Selene Galatina 01/05/1989 2 1,3 3,3 Calò Macchia San Cesario di 16 Roberta Lecce 03/05/1983 1 1 17 Cannone Giuseppe Galatina 21/05/1982 1 0,01 1,01 Capone Valentina San Cesario di 18 Consiglia Lecce 20/05/182 4 1,608 0,4 6,01 Comune di Lequile Prov. -

Preselezioni Elenco Degli Ammessi 2013 No
COMUNE DI POGGIARDO Provincia di Lecce COMANDO POLIZIA LOCALE CONCORSO PUBBLICO, PER TITOLI ED ESAMI, PER LA COPERTURA DI N. 3 POSTI DI AGENTE DI POLIZIA LOCALE - CATEGORIA C - A TEMPO INDETRMINATO E PARZIALE A 12 ORE SETTIMANALI ELENCO CANDIDATI AMMESSI ALLA PRESELEZIONE - GRUPPO A. PROVA: MERCOLEDI' 23.10.2013 ORE 9:00 TEATRO ILLIRIA (VIA ARMANDO DIAZ N. 220) - POGGIARDO N. COGNOME NOME LUOGO DI NASCITA PR DATA DI NASCITA CITTA' DI RESIDENZA 1 ACCOGLI TIZIANA GAGLIANO DEL CAPO LE 06/03/1983 ANDRANO 2 ACQUAVIVA ANDREA PUTIGNANO BA 30/11/1972 MONOPOLI 3 AFRUNE ROBERTO POGGIARDO LE 22/08/1988 POGGIARDO 4 AGROSI' SANDRA SCORRANO LE 26/02/1984 MAGLIE 5 AGRUSTI ANTONELLA MOTTOLA TA 29/07/1981 LEQUILE 6 ALBENZIO MARIANGELA VENOSA PZ 05/01/1980 PAL. SAN GERVASIO 7 ALFIERI L. STEFANO BARI BA 07/10/1978 BARI 8 AMATI ELIGIO PUTIGNANO BA 28/07/1984 MARTINA FRANCA 9 AMATO DANIELA SCORRANO LE 26/08/1979 SCORRANO 10 APOLLONIO MARCO GALATINA LE 13/09/1978 ARADEO 11 AQUILINO MODESTO PUTIGNANO BA 03/12/1987 ALBEROBELLO 12 ARETANO MICHELE TRICASE LE 22/09/1987 TRICASE 13 ARGENTIERI FRANCESCA GALATINA LE 07/06/1982 GALATINA 14 ARRIGHI PAOLO EMILIO POGGIARDO LE 27/04/1976 SAN CESARIO DI ECCE 15 ASTORE GIUSEPPE POGGIARDO LE 09/10/1986 POGGIARDO 16 ASTORE VALENTINA POGGIARDO LE 19/11/1987 POGGIARDO N. COGNOME NOME LUOGO DI NASCITA PR DATA DI NASCITA CITTA' DI RESIDENZA 17 BANDELLO ANGELO GALATINA LE 27/11/1984 CUTROFIANO 18 BANDELLO ANTONIO GALATINA LE 27/05/1983 CUTROFIANO 19 BATTIPAGLIA MARIA LECCE LE 11/06/1978 LECCE 20 BELLO DANIELA POGGIARDO LE 28/09/1980 OTRANTO 21 BELLO LUIGI MOLA DI BARI BA 07/05/1988 MASSAFRA 22 BERTI ADELE CAVA DE' TIRRENI SA 28/06/1980 CAVA DE TIRRENI 23 BEVILACQUA SERENA POGGIARDO LE 24/06/1992 POGGIARDO 24 BIANCO ALESSIO CANTU' CO 15/12/1989 CURSI 25 BIANCO PIERLUIGI LECCE LE 08/04/1976 LECCE 26 BIONDOLILLO DANIELA TARANTO TA 26/01/1980 TARANTO 27 BLEVE MARIA ELISABETTA POGGIARDO LE 11/09/1985 SANTA CESAREA T. -

Rubrica Del Ruolo Matricolare - Distretto Militare Di Lecce - 1918
Rubrica del Ruolo Matricolare - Distretto militare di Lecce - 1918 Cognome Nome Luogo di nascita matricola Abate Carmelo Lecce 154 Abaterusso Giuseppe Patù 2616 Abbadessa Giuseppe Lecce 710 Abruzzese Guido Gallipoli 2617 Accogli Ippazio Andrano 1893 Accogli Luigi Andrano 2618 Accogli Pietro Andrano 1894 Accogli Salvatore Andrano 2909 Accoto Rosario Minervino 1858 Accursi Giuseppe Nardò 1350 Adamo Antonio Nardò 1351 Adorno Antonio Monteroni 1028 Aggiano Angelo Brindisi 2910 Agostinelli Rocco Tricase 2021 Agostinello Tullio Lecce 93 Agosto Antonio Ruffano 2075 Agosto Francesco Corsano 606 Agricola Giuseppe Tricase 1870 Albanese Antonio Galatina 1130 Albano Antonio Veglie 499 Albano Cosimo Ugento 2438 Albano Vito Presicce 702 Alemanno Antonio Spongano 2601 Alemanno Biagio Alessano 573 Alemanno Biagio Taviano 1810 Alemanno Cesare Veglie 4 Alemanno Luigi Gallipoli 2598 Alemanno Pasquale Salice S. 450 Alemanno Salvatore Spongano 327 Alemanno Antonio Copertino 1524 Alessandri Aniceto Minervino 2599 Alfarano Cosimo Diso 2513 Altamura Antonio Castrì 875 Altamura Oronzo Vernole 1076 Amante Alberto Taviano 1811 Amato Antonio Muro 1117 Amato Carlo Castrignano 1926 Amato Gioacchino Galatina 1131 Ameri Rocco Montesano 2600 Amico Rocco Alessano 574 Amoroso Italo Alessano 2433 Anchora Donato Corigliano 199 Pagina 1 Rubrica del Ruolo Matricolare - Distretto militare di Lecce - 1918 Cognome Nome Luogo di nascita matricola Ancora Felice Galatina 1348 Ancora Giuseppe Soleto 1250 Ancora Rosario Campi S. 352 Andreani de Vito Francesco Lequile 2620 Andriani -

Historic Records and GIS Applications for Flood Risk Analysis in the Salento
Natural Hazards and Earth System Sciences, 5, 833–844, 2005 SRef-ID: 1684-9981/nhess/2005-5-833 Natural Hazards European Geosciences Union and Earth © 2005 Author(s). This work is licensed System Sciences under a Creative Commons License. Historic records and GIS applications for flood risk analysis in the Salento peninsula (southern Italy) F. Forte1, L. Pennetta1, and R. O. Strobl2 1Sezione di Geografia fisica e Geomorfologia – Dipartimento di Geologia e Geofisica, Universita` degli Studi di Bari, via E. Orabona 4, 70125 Bari, Italy 2ITC – International Institute for Geoinformation Science and Earth Observation, Hengelosestraat 99, 7514 AE Enschede, The Netherlands Received: 17 November 2004 – Revised: 13 October 2005 – Accepted: 19 October 2005 – Published: 2 November 2005 Abstract. The occurrence of calamitous meteoric events rep- ing and emergency states to the population and economic ac- resents a current problem of the Salento peninsula (Southern tivity. Italy). In fact, flash floods, generated by very intense rainfall, occur not only in autumn and winter, but at the end of sum- 1.2 Geological and geomorphological settings mer as well. These calamities are amplified by peculiar geo- logical and geomorphological characteristics of Salento and The Salento peninsula, the southeast portion of the Apulia by the pollution of sinkholes. Floodings affect often large region (southern Italy), covers 7000 km2 of area and stretches areas, especially in the impermeable lowering zones. These over 150 km between the Ionian and Adriatic seas (Fig. 1). events cause warnings and emergency states, involving peo- The peninsula includes two extreme geographical points: the ple as well as socio-economic goods. -

TMP-Template43882 1..1
ISSN 1725-2555 Official Journal L277 Volume 46 of the European Union 28 October 2003 English edition Legislation Contents I Acts whose publication is obligatory Commission Regulation (EC) No 1883/2003 of 27 October 2003 establishing the stan- dard import values for determining the entry price of certain fruit and vegetables ......... 1 Commission Regulation (EC) No 1884/2003 of 24 October 2003 authorising transfers between the quantitative limits of textiles and clothing products originating in Macao .... 3 Commission Regulation (EC) No 1885/2003 of 27 October 2003 amending Regula- tion (EC) No 2138/97 delimiting the homogenous olive oil production zones ....... 5 Commission Regulation (EC) No 1886/2003 of 27 October 2003 modifying Commission Regulation (EC) No 2673/2000 laying down detailed rules for the application of the tariff quota for imports of beef and veal provided for in Council Regulation (EC) No 2475/2000 for the Republic of Slovenia and dero- gating from that Regulation ........................................................................... 8 Commission Regulation (EC) No 1887/2003 of 27 October 2003 concerning the classification of certain goods in the Combined Nomenclature ........................... 11 Commission Regulation (EC) No 1888/2003 of 27 October 2003 determining the world market price for unginned cotton ....................................................................... 13 Commission Regulation (EC) No 1889/2003 of 27 October 2003 fixing Community producer and import prices for carnations and roses -

Affari Generali Determinazione
COMUNE DI LEQUILE PROVINCIA DI LECCE _______________________________________________________________________________ COPIA 314 / 10 / 14 / 149 SETTORE 1º - AFFARI GENERALI Personale - Contenzioso - Cultura e Sport - Pubblica Istruzione - Affari Istituzionali - Segreteria - Anagrafe e Stato Civile - Elettorale - Protocollo - Servizi Sociali D E T E R M I N A Z I O N E OGGETTO: CONCORSO PUBBLICO PER TITOLI ED ESAMI PER L'ASSUNZIONE DI N. 1 ISTRUTTORE AMMINISTRATIVO CAT. C , PART-TIME 18 ORE SETTIMANALI, DA DESTINARE AL SETTORE AA.GG - SERVIZI DEMOGRAFICI ED ELETTORALE- AMMISSIBILITA' DEI CANDIDATI O LORO ESCLUSIONE - DETERMINAZIONI N. Registro Generale N. Registro del Servizio Data 314 149 20/10/2014 Impegno Impegno / Liquidazione Liquidazione Accertamento Altro IL RESPONSABILE DI SETTORE Premesso che: • Con deliberazione G.C. n. 138 in data 24.05.2012 avente ad oggetto “Programmazione Fabbisogno Personale triennio 2012-2014 - Determinazioni”, immediatamente esecutiva, è stato affidato a questo Servizio Personale il compito di predisporre ogni atto gestionale ritenuto utile e necessario per procedere a tutte le assunzioni programmate nell’anno 2012; • Che tra le assunzioni a tempo indeterminato rientra quella di n. 1 "Istruttore amministrativo", Cat. C, part- time 18 ore settimanali, da assegnare al Settori AA.GG - Servizi demografici ed elettorale; • L’espletamento del suddetto concorso è stato confermato nella programmazione delle assunzioni da effettuarsi nell’anno 2014; Vista e richiamata , a tal fine, la propria determinazione n. 248 del 19.07.2012 con la quale è stato approvato il relativo bando di concorso; Accertato che sono state rispettate tutte le procedure per garantire allo stesso la massima pubblicità, secondo quanto riportato nel relativo regolamento di accesso agli impieghi; Preso atto che entro il termine ultimo (10.09.2012) stabilito per la presentazione delle domande di partecipazione al concorso, sono pervenute n. -

LECCE E Provincia INFORMA SALUTE Accesso Al Servizio Sanitario Nazionale Per I Cittadini Stranieri
Progetto Istituto Ministero della Salute Ministero dell’Interno co-finanziato Nazionale Dipartimento Dipartimento dall’Unione Salute, Migrazioni della Prevenzione per le Libertà Civili Europea e Povertà e Comunicazione e l’Immigrazione IFoNndo EuFropOeo perR l'InMtegraziAone dSei CAittadLini dUei PaTesi TE erzi Accesso al Servizio Sanitario Nazionale per i Cittadini stranieri I Servizi Sanitari di LECCE e Provincia INFORMA SALUTE Accesso al Servizio Sanitario Nazionale per i Cittadini Stranieri I PRINCIPALI SERVIZI SANITARI DI LECCE E PROVINCIA LES PRINCIPAUX SERVICES DE SANTÉ DE LECCE ET SA PROVINCE THE MAIN HEALTH SERVICES OF LECCE AND ITS PROVINCE I PRINCIPALI SERVIZI SANITARI DI LECCE E PROVINCIA LES PRINCIPAUX SERVICES DE SANTÉ DE LECCE ET SA PROVINCE/ THE MAIN HEALTH SERVICES OF LECCE AND ITS PROVINCE L’Azienda Sanitaria di Lecce interessa l’intera provincia di Lecce e si articola in dieci Distretti Sanitari che comprendono i 97 comuni del territorio. Il Distretto sanitario è la struttura organizzativa che assicura i servizi sanitari “territoriali”, comprendenti tutte le attività di pre - venzione, diagnosi, cura e riabilitazione erogati in regime ambu - 2 latoriale, diurno, semiresidenziale e residenziale. DISTRETTO SANITARIO DI LECCE Sede: Piazza Bottazzi, Lecce Telefono: 0832/215286 -215139 - Fax: 0832/215764 E-mail: [email protected] Territorio di riferimento: Comuni di Lecce, Arnesano, San Cesario, Cavallino, Monteroni, S. Pietro in Lama, Lizzanello, S. Donato, Lequile, Surbo. DISTRETTO SANITARIO DI CAMPI SALENTINA Sede: Via Lecce, Campi Salentina Telefono: 0832/7901 E-mail: [email protected] Territorio di riferimento: Comuni di Campi Salentina, Squinzano, Trepuzzi, Novoli, Guagnano, Salice Salentino, Carmiano, Veglie. DISTRETTO SANITARIO DI CASARANO Sede: Via Vittorio Emanuele 18, Casarano Telefono: 0833/508550 - Fax: 0833/512908 E-mail: [email protected] Territorio di riferimento: Comuni di Casarano, Taurisano, Collepasso, Supersano, Parabita, Matino, Ruffano. -

Villa Palmira Nr Lecce, Puglia
Villa Palmira nr Lecce, Puglia Sleeps 9 guests, 4 bedrooms, 5 bathrooms DESCRIPTION Tucked away in a beautiful residential area just a few minutes' walk from the local village shops and restaurants, and within ten minutes' drive of Lecce, Villa Palmira is a fine Apulian country villa with air-conditioned bedrooms and a good size pool set in a lush Mediterranean garden. This is a substantial family home offering all modern comforts and privacy within its splendid grounds. Ideal for a family holiday, it is very easy to relax in such an idyllic setting; either by the pool surrounded by palm trees and scented shrubs, or under the pergolas where you can dine al fresco (and you can buy your fresh ingredients from the local shop, just a stroll away!) LOCATION Lequile 500 metres, Lecce 2km, San Cataldo 19km, Santa Caterina & Porto Cesareo 29km, Otranto 44km, Santa Maria di Leuca 72km, Brindisi 48km, Bari 175km, Otranto 44km, Santa Maria di Leuca 72km, shops | restaurants 500m , Gallipoli beaches 35km, Tennis court in Lequile, Acaya Golf Club 21km, Lecce Roman theatre | Baroque buildings | Castle 2km, Basilica Santa Croce & Lecce cathedral 2km, Kalos Archaeological Park Caprarica di Lecce 14km, Salento in Miniatura Theme Park 22km, Splash Theme Park Gallipoli 40km, Castro Marina (Grotta Zinzulusa) 48km. ACCOMMODATION Ground floor:Living room, (TV) open fireplace, French doors to terrace.Dining room, open fireplace, French doors to terrace.Studio/ library.Large modern kitchen/ breakfast room, Guest WC.First floor:Double/ twin bedroom (2 x 0.80m), (TV), air conditioning, garden and pool view.Double bedroom (1.60m), (TV), air conditioning, library, French door to balcony (take extra care with young children).Triple bedroom (3 x 0.80m) (suitable for children). -

Orari Dal 15 Sett 2008
SOCIETA' TRASPORTI PUBBLICI DI TERRA D'OTRANTO S.p.A. - LECCE Linea: 211 As PORTO CESAREO-LEVERANO-LECCE Codice corsa 2111 2115G 2115I 2115 2115B 2113B 2115E 2115D 2113 2115F Validità L/S ORD L/S SC L/S SC L/S SC L/S SC L/S SC L/S SC L/S SC L/S ORD L/S SC Nota corsa [1] Km Corsa 22 12 7 21 21 31 16 16 31 8 PORTO CESAREO 6.55 6.55 LEVERANO 7.10 7.10 7.10 7.10 LEVERANO P.LUNGO 6.20 COPERTINO 6.30 7.20 7.20 7.20 7.20 7.20 7.20 MONTERONI MONTERONI PIAZZA CANDIDO 7.10 SAN PIETRO IN LAMA 6.40 7.20 7.35 7.35 7.35 7.35 7.35 7.35 7.35 LECCE TANGENZIALE 7.45 PIAZZA PALIO LECCE ITIS LECCE QUESTURA LEQUILE 6.45 7.25 7.35 7.40 7.40 7.40 7.40 LECCE BAR ROSSO E NERO 7.55 LECCE TANGENZIALE 7.45 FIORINI IN COPERTINO ITC LECCE CAPOLINEA 7.05 7.40 7.50 7.50 7.50 7.55 7.55 Legenda Note [1] = Partenza da Piazza Candido - Transita da Istituto Presta [2] = A Copertino transita da via Pirandello. Pagina 1 di 6 SOCIETA' TRASPORTI PUBBLICI DI TERRA D'OTRANTO S.p.A. - LECCE Linea: 211 As PORTO CESAREO-LEVERANO-LECCE Codice corsa 2117B 2115H 2117 2117D 82073 82072 2119 21111 21115S Validità L/S SC L/S SC L/S ORD L/S SC L/S SC L/S SC L/S ORD L/S ORD SAB ORD Nota corsa [2] Km Corsa 21 8 31 5 17 17 31 25 34 PORTO CESAREO 7.30 8.30 13.15 LEVERANO 7.40 7.50 8.45 12.45 13.35 LEVERANO P.LUNGO 7.40 COPERTINO 8.00 8.55 12.55 13.45 MONTERONI 13.10 14.00 MONTERONI PIAZZA CANDIDO SAN PIETRO IN LAMA 7.35 8.10 9.05 13.15 14.05 LECCE TANGENZIALE 7.45 7.45 PIAZZA PALIO 8.00 8.00 LECCE ITIS 8.05 8.05 LECCE QUESTURA 8.10 8.10 LEQUILE 7.40 8.15 9.20 13.20 14.10 LECCE BAR ROSSO E NERO 7.55 LECCE TANGENZIALE FIORINI IN COPERTINO ITC 7.55 8.10 LECCE CAPOLINEA 8.25 8.30 9.40 13.35 14.25 Legenda Note [1] = Partenza da Piazza Candido - Transita da Istituto Presta [2] = A Copertino transita da via Pirandello.