Oversampling with Noise Shaping • Place the Quantizer in a Feedback Loop Xn() Yn() Un() Hz() – Quantizer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mathematical Basics of Bandlimited Sampling and Aliasing
Signal Processing Mathematical basics of bandlimited sampling and aliasing Modern applications often require that we sample analog signals, convert them to digital form, perform operations on them, and reconstruct them as analog signals. The important question is how to sample and reconstruct an analog signal while preserving the full information of the original. By Vladimir Vitchev o begin, we are concerned exclusively The limits of integration for Equation 5 T about bandlimited signals. The reasons are specified only for one period. That isn’t a are both mathematical and physical, as we problem when dealing with the delta func- discuss later. A signal is said to be band- Furthermore, note that the asterisk in Equa- tion, but to give rigor to the above expres- limited if the amplitude of its spectrum goes tion 3 denotes convolution, not multiplica- sions, note that substitutions can be made: to zero for all frequencies beyond some thresh- tion. Since we know the spectrum of the The integral can be replaced with a Fourier old called the cutoff frequency. For one such original signal G(f), we need find only the integral from minus infinity to infinity, and signal (g(t) in Figure 1), the spectrum is zero Fourier transform of the train of impulses. To the periodic train of delta functions can be for frequencies above a. In that case, the do so we recognize that the train of impulses replaced with a single delta function, which is value a is also the bandwidth (BW) for this is a periodic function and can, therefore, be the basis for the periodic signal. -

Autoencoding Neural Networks As Musical Audio Synthesizers
Proceedings of the 21st International Conference on Digital Audio Effects (DAFx-18), Aveiro, Portugal, September 4–8, 2018 AUTOENCODING NEURAL NETWORKS AS MUSICAL AUDIO SYNTHESIZERS Joseph Colonel Christopher Curro Sam Keene The Cooper Union for the Advancement of The Cooper Union for the Advancement of The Cooper Union for the Advancement of Science and Art Science and Art Science and Art NYC, New York, USA NYC, New York, USA NYC, New York, USA [email protected] [email protected] [email protected] ABSTRACT This training corpus consists of five-octave C Major scales on var- ious synthesizer patches. Once training is complete, we bypass A method for musical audio synthesis using autoencoding neural the encoder and directly activate the smallest hidden layer of the networks is proposed. The autoencoder is trained to compress and autoencoder. This activation produces a magnitude STFT frame reconstruct magnitude short-time Fourier transform frames. The at the output. Once several frames are produced, phase gradient autoencoder produces a spectrogram by activating its smallest hid- integration is used to construct a phase response for the magnitude den layer, and a phase response is calculated using real-time phase STFT. Finally, an inverse STFT is performed to synthesize audio. gradient heap integration. Taking an inverse short-time Fourier This model is easy to train when compared to other state-of-the-art transform produces the audio signal. Our algorithm is light-weight methods, allowing for musicians to have full control over the tool. when compared to current state-of-the-art audio-producing ma- This paper presents improvements over the methods outlined chine learning algorithms. -
Efficient Supersampling Antialiasing for High-Performance Architectures
Efficient Supersampling Antialiasing for High-Performance Architectures TR91-023 April, 1991 Steven Molnar The University of North Carolina at Chapel Hill Department of Computer Science CB#3175, Sitterson Hall Chapel Hill, NC 27599-3175 This work was supported by DARPA/ISTO Order No. 6090, NSF Grant No. DCI- 8601152 and IBM. UNC is an Equa.l Opportunity/Affirmative Action Institution. EFFICIENT SUPERSAMPLING ANTIALIASING FOR HIGH PERFORMANCE ARCHITECTURES Steven Molnar Department of Computer Science University of North Carolina Chapel Hill, NC 27599-3175 Abstract Techniques are presented for increasing the efficiency of supersampling antialiasing in high-performance graphics architectures. The traditional approach is to sample each pixel with multiple, regularly spaced or jittered samples, and to blend the sample values into a final value using a weighted average [FUCH85][DEER88][MAMM89][HAEB90]. This paper describes a new type of antialiasing kernel that is optimized for the constraints of hardware systems and produces higher quality images with fewer sample points than traditional methods. The central idea is to compute a Poisson-disk distribution of sample points for a small region of the screen (typically pixel-sized, or the size of a few pixels). Sample points are then assigned to pixels so that the density of samples points (rather than weights) for each pixel approximates a Gaussian (or other) reconstruction filter as closely as possible. The result is a supersampling kernel that implements importance sampling with Poisson-disk-distributed samples. The method incurs no additional run-time expense over standard weighted-average supersampling methods, supports successive-refinement, and can be implemented on any high-performance system that point samples accurately and has sufficient frame-buffer storage for two color buffers. -
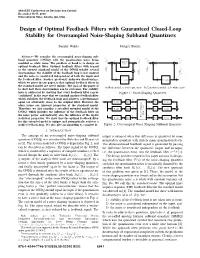
Design of Optimal Feedback Filters with Guaranteed Closed-Loop Stability for Oversampled Noise-Shaping Subband Quantizers
49th IEEE Conference on Decision and Control December 15-17, 2010 Hilton Atlanta Hotel, Atlanta, GA, USA Design of Optimal Feedback Filters with Guaranteed Closed-Loop Stability for Oversampled Noise-Shaping Subband Quantizers SanderWahls HolgerBoche. Abstract—We consider the oversampled noise-shaping sub- T T T T ] ] ] ] band quantizer (ONSQ) with the quantization noise being q q v q,q v q,q + Quant- + + + + modeled as white noise. The problem at hand is to design an q - q izer q q - q q ,...,w ,...,w optimal feedback filter. Optimal feedback filters with regard 1 1 ,...,v ,...,v to the current standard model of the ONSQ inhabit several + q,1 q,1 w=[w + w=[w =[v =[v shortcomings: the stability of the feedback loop is not ensured - q q v v and the noise is considered independent of both the input and u ŋ u ŋ -1 -1 the feedback filter. Another previously unknown disadvantage, q z F(z) q q z F(z) q which we prove in our paper, is that optimal feedback filters in the standard model are never unique. The goal of this paper is (a) Real model: η is the qnt. error (b) Linearized model: η is white noise to show how these shortcomings can be overcome. The stability issue is addressed by showing that every feedback filter can be Figure 1: Noise-Shaping Quantizer “stabilized” in the sense that we can find another feedback filter which stabilizes the feedback loop and achieves a performance w v E (z) p 1 q,1 p R (z) equal (or arbitrarily close) to the original filter. -

Moving Average Filters
CHAPTER 15 Moving Average Filters The moving average is the most common filter in DSP, mainly because it is the easiest digital filter to understand and use. In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response. This makes it the premier filter for time domain encoded signals. However, the moving average is the worst filter for frequency domain encoded signals, with little ability to separate one band of frequencies from another. Relatives of the moving average filter include the Gaussian, Blackman, and multiple- pass moving average. These have slightly better performance in the frequency domain, at the expense of increased computation time. Implementation by Convolution As the name implies, the moving average filter operates by averaging a number of points from the input signal to produce each point in the output signal. In equation form, this is written: EQUATION 15-1 Equation of the moving average filter. In M &1 this equation, x[ ] is the input signal, y[ ] is ' 1 % y[i] j x [i j ] the output signal, and M is the number of M j'0 points used in the moving average. This equation only uses points on one side of the output sample being calculated. Where x[ ] is the input signal, y[ ] is the output signal, and M is the number of points in the average. For example, in a 5 point moving average filter, point 80 in the output signal is given by: x [80] % x [81] % x [82] % x [83] % x [84] y [80] ' 5 277 278 The Scientist and Engineer's Guide to Digital Signal Processing As an alternative, the group of points from the input signal can be chosen symmetrically around the output point: x[78] % x[79] % x[80] % x[81] % x[82] y[80] ' 5 This corresponds to changing the summation in Eq. -
ESE 531: Digital Signal Processing
ESE 531: Digital Signal Processing Lec 12: February 21st, 2017 Data Converters, Noise Shaping (con’t) Penn ESE 531 Spring 2017 - Khanna Lecture Outline ! Data Converters " Anti-aliasing " ADC " Quantization " Practical DAC ! Noise Shaping Penn ESE 531 Spring 2017 - Khanna 2 ADC Penn ESE 531 Spring 2017 - Khanna 3 Anti-Aliasing Filter with ADC Penn ESE 531 Spring 2017 - Khanna 4 Oversampled ADC Penn ESE 531 Spring 2017 - Khanna 5 Oversampled ADC Penn ESE 531 Spring 2017 - Khanna 6 Oversampled ADC Penn ESE 531 Spring 2017 - Khanna 7 Oversampled ADC Penn ESE 531 Spring 2017 - Khanna 8 Sampling and Quantization Penn ESE 531 Spring 2017 - Khanna 9 Sampling and Quantization Penn ESE 531 Spring 2017 - Khanna 10 Effect of Quantization Error on Signal ! Quantization error is a deterministic function of the signal " Consequently, the effect of quantization strongly depends on the signal itself ! Unless, we consider fairly trivial signals, a deterministic analysis is usually impractical " More common to look at errors from a statistical perspective " "Quantization noise” ! Two aspects " How much noise power (variance) does quantization add to our samples? " How is this noise distributed in frequency? Penn ESE 531 Spring 2017 - Khanna 11 Quantization Error ! Model quantization error as noise ! In that case: Penn ESE 531 Spring 2017 - Khanna 12 Ideal Quantizer ! Quantization step Δ ! Quantization error has sawtooth shape, ! Bounded by –Δ/2, +Δ/2 ! Ideally infinite input range and infinite number of quantization levels Penn ESE 568 Fall 2016 - Khanna adapted from Murmann EE315B, Stanford 13 Ideal B-bit Quantizer ! Practical quantizers have a limited input range and a finite set of output codes ! E.g. -

Application Note Template
correction. of TOI measurements with noise performance the improved show examples Measurement presented. is correction a noise of means by improvements range Dynamic explained. are analyzer spectrum of a factors the limiting correction. The basic requirements and noise with measurements spectral about This application note provides information | | | Products: Note Application Correction Noise with Range Dynamic Improved R&S R&S R&S FSQ FSU FSG Application Note Kay-Uwe Sander Nov. 2010-1EF76_0E Table of Contents Table of Contents 1 Overview ................................................................................. 3 2 Dynamic Range Limitations .................................................. 3 3 Signal Processing - Noise Correction .................................. 4 3.1 Evaluation of the noise level.......................................................................4 3.2 Details of the noise correction....................................................................5 4 Measurement Examples ........................................................ 7 4.1 Extended dynamic range with noise correction .......................................7 4.2 Low level measurements on noise-like signals ........................................8 4.3 Measurements at the theoretical limits....................................................10 5 Literature............................................................................... 11 6 Ordering Information ........................................................... 11 1EF76_0E Rohde & Schwarz -

Comparing Oversampling Techniques to Handle the Class Imbalance Problem: a Customer Churn Prediction Case Study
Received September 14, 2016, accepted October 1, 2016, date of publication October 26, 2016, date of current version November 28, 2016. Digital Object Identifier 10.1109/ACCESS.2016.2619719 Comparing Oversampling Techniques to Handle the Class Imbalance Problem: A Customer Churn Prediction Case Study ADNAN AMIN1, SAJID ANWAR1, AWAIS ADNAN1, MUHAMMAD NAWAZ1, NEWTON HOWARD2, JUNAID QADIR3, (Senior Member, IEEE), AHMAD HAWALAH4, AND AMIR HUSSAIN5, (Senior Member, IEEE) 1Center for Excellence in Information Technology, Institute of Management Sciences, Peshawar 25000, Pakistan 2Nuffield Department of Surgical Sciences, University of Oxford, Oxford, OX3 9DU, U.K. 3Information Technology University, Arfa Software Technology Park, Lahore 54000, Pakistan 4College of Computer Science and Engineering, Taibah University, Medina 344, Saudi Arabia 5Division of Computing Science and Maths, University of Stirling, Stirling, FK9 4LA, U.K. Corresponding author: A. Amin ([email protected]) The work of A. Hussain was supported by the U.K. Engineering and Physical Sciences Research Council under Grant EP/M026981/1. ABSTRACT Customer retention is a major issue for various service-based organizations particularly telecom industry, wherein predictive models for observing the behavior of customers are one of the great instruments in customer retention process and inferring the future behavior of the customers. However, the performances of predictive models are greatly affected when the real-world data set is highly imbalanced. A data set is called imbalanced if the samples size from one class is very much smaller or larger than the other classes. The most commonly used technique is over/under sampling for handling the class-imbalance problem (CIP) in various domains. -

Super-Sampling Anti-Aliasing Analyzed
Super-sampling Anti-aliasing Analyzed Kristof Beets Dave Barron Beyond3D [email protected] Abstract - This paper examines two varieties of super-sample anti-aliasing: Rotated Grid Super- Sampling (RGSS) and Ordered Grid Super-Sampling (OGSS). RGSS employs a sub-sampling grid that is rotated around the standard horizontal and vertical offset axes used in OGSS by (typically) 20 to 30°. RGSS is seen to have one basic advantage over OGSS: More effective anti-aliasing near the horizontal and vertical axes, where the human eye can most easily detect screen aliasing (jaggies). This advantage also permits the use of fewer sub-samples to achieve approximately the same visual effect as OGSS. In addition, this paper examines the fill-rate, memory, and bandwidth usage of both anti-aliasing techniques. Super-sampling anti-aliasing is found to be a costly process that inevitably reduces graphics processing performance, typically by a substantial margin. However, anti-aliasing’s posi- tive impact on image quality is significant and is seen to be very important to an improved gaming experience and worth the performance cost. What is Aliasing? digital medium like a CD. This translates to graphics in that a sample represents a specific moment as well as a Computers have always strived to achieve a higher-level specific area. A pixel represents each area and a frame of quality in graphics, with the goal in mind of eventu- represents each moment. ally being able to create an accurate representation of reality. Of course, to achieve reality itself is impossible, At our current level of consumer technology, it simply as reality is infinitely detailed. -

Designing Filters Using the Digital Filter Design Toolkit Rahman Jamal, Mike Cerna, John Hanks
NATIONAL Application Note 097 INSTRUMENTS® The Software is the Instrument ® Designing Filters Using the Digital Filter Design Toolkit Rahman Jamal, Mike Cerna, John Hanks Introduction The importance of digital filters is well established. Digital filters, and more generally digital signal processing algorithms, are classified as discrete-time systems. They are commonly implemented on a general purpose computer or on a dedicated digital signal processing (DSP) chip. Due to their well-known advantages, digital filters are often replacing classical analog filters. In this application note, we introduce a new digital filter design and analysis tool implemented in LabVIEW with which developers can graphically design classical IIR and FIR filters, interactively review filter responses, and save filter coefficients. In addition, real-world filter testing can be performed within the digital filter design application using a plug-in data acquisition board. Digital Filter Design Process Digital filters are used in a wide variety of signal processing applications, such as spectrum analysis, digital image processing, and pattern recognition. Digital filters eliminate a number of problems associated with their classical analog counterparts and thus are preferably used in place of analog filters. Digital filters belong to the class of discrete-time LTI (linear time invariant) systems, which are characterized by the properties of causality, recursibility, and stability. They can be characterized in the time domain by their unit-impulse response, and in the transform domain by their transfer function. Obviously, the unit-impulse response sequence of a causal LTI system could be of either finite or infinite duration and this property determines their classification into either finite impulse response (FIR) or infinite impulse response (IIR) system. -

Finite Impulse Response (FIR) Digital Filters (II) Ideal Impulse Response Design Examples Yogananda Isukapalli
Finite Impulse Response (FIR) Digital Filters (II) Ideal Impulse Response Design Examples Yogananda Isukapalli 1 • FIR Filter Design Problem Given H(z) or H(ejw), find filter coefficients {b0, b1, b2, ….. bN-1} which are equal to {h0, h1, h2, ….hN-1} in the case of FIR filters. 1 z-1 z-1 z-1 z-1 x[n] h0 h1 h2 h3 hN-2 hN-1 1 1 1 1 1 y[n] Consider a general (infinite impulse response) definition: ¥ H (z) = å h[n] z-n n=-¥ 2 From complex variable theory, the inverse transform is: 1 n -1 h[n] = ò H (z)z dz 2pj C Where C is a counterclockwise closed contour in the region of convergence of H(z) and encircling the origin of the z-plane • Evaluating H(z) on the unit circle ( z = ejw ) : ¥ H (e jw ) = åh[n]e- jnw n=-¥ 1 p h[n] = ò H (e jw )e jnwdw where dz = jejw dw 2p -p 3 • Design of an ideal low pass FIR digital filter H(ejw) K -2p -p -wc 0 wc p 2p w Find ideal low pass impulse response {h[n]} 1 p h [n] = H (e jw )e jnwdw LP ò 2p -p 1 wc = Ke jnwdw 2p ò -wc Hence K h [n] = sin(nw ) n = 0, ±1, ±2, …. ±¥ LP np c 4 Let K = 1, wc = p/4, n = 0, ±1, …, ±10 The impulse response coefficients are n = 0, h[n] = 0.25 n = ±4, h[n] = 0 = ±1, = 0.225 = ±5, = -0.043 = ±2, = 0.159 = ±6, = -0.053 = ±3, = 0.075 = ±7, = -0.032 n = ±8, h[n] = 0 = ±9, = 0.025 = ±10, = 0.032 5 Non Causal FIR Impulse Response We can make it causal if we shift hLP[n] by 10 units to the right: K h [n] = sin((n -10)w ) LP (n -10)p c n = 0, 1, 2, …. -

CSMOUTE: Combined Synthetic Oversampling and Undersampling Technique for Imbalanced Data Classification
CSMOUTE: Combined Synthetic Oversampling and Undersampling Technique for Imbalanced Data Classification Michał Koziarski Department of Electronics AGH University of Science and Technology Al. Mickiewicza 30, 30-059 Kraków, Poland Email: [email protected] Abstract—In this paper we propose a novel data-level algo- ity observations (oversampling). Secondly, the algorithm-level rithm for handling data imbalance in the classification task, Syn- methods, which adjust the training procedure of the learning thetic Majority Undersampling Technique (SMUTE). SMUTE algorithms to better accommodate for the data imbalance. In leverages the concept of interpolation of nearby instances, previ- ously introduced in the oversampling setting in SMOTE. Further- this paper we focus on the former. Specifically, we propose more, we combine both in the Combined Synthetic Oversampling a novel undersampling algorithm, Synthetic Majority Under- and Undersampling Technique (CSMOUTE), which integrates sampling Technique (SMUTE), which leverages the concept of SMOTE oversampling with SMUTE undersampling. The results interpolation of nearby instances, previously introduced in the of the conducted experimental study demonstrate the usefulness oversampling setting in SMOTE [5]. Secondly, we propose a of both the SMUTE and the CSMOUTE algorithms, especially when combined with more complex classifiers, namely MLP and Combined Synthetic Oversampling and Undersampling Tech- SVM, and when applied on datasets consisting of a large number nique (CSMOUTE), which integrates SMOTE oversampling of outliers. This leads us to a conclusion that the proposed with SMUTE undersampling. The aim of this paper is to approach shows promise for further extensions accommodating serve as a preliminary study of the potential usefulness of local data characteristics, a direction discussed in more detail in the proposed approach, with the final goal of extending it to the paper.