Preview Only
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Autoencoding Neural Networks As Musical Audio Synthesizers
Proceedings of the 21st International Conference on Digital Audio Effects (DAFx-18), Aveiro, Portugal, September 4–8, 2018 AUTOENCODING NEURAL NETWORKS AS MUSICAL AUDIO SYNTHESIZERS Joseph Colonel Christopher Curro Sam Keene The Cooper Union for the Advancement of The Cooper Union for the Advancement of The Cooper Union for the Advancement of Science and Art Science and Art Science and Art NYC, New York, USA NYC, New York, USA NYC, New York, USA [email protected] [email protected] [email protected] ABSTRACT This training corpus consists of five-octave C Major scales on var- ious synthesizer patches. Once training is complete, we bypass A method for musical audio synthesis using autoencoding neural the encoder and directly activate the smallest hidden layer of the networks is proposed. The autoencoder is trained to compress and autoencoder. This activation produces a magnitude STFT frame reconstruct magnitude short-time Fourier transform frames. The at the output. Once several frames are produced, phase gradient autoencoder produces a spectrogram by activating its smallest hid- integration is used to construct a phase response for the magnitude den layer, and a phase response is calculated using real-time phase STFT. Finally, an inverse STFT is performed to synthesize audio. gradient heap integration. Taking an inverse short-time Fourier This model is easy to train when compared to other state-of-the-art transform produces the audio signal. Our algorithm is light-weight methods, allowing for musicians to have full control over the tool. when compared to current state-of-the-art audio-producing ma- This paper presents improvements over the methods outlined chine learning algorithms. -

Application Note Template
correction. of TOI measurements with noise performance the improved show examples Measurement presented. is correction a noise of means by improvements range Dynamic explained. are analyzer spectrum of a factors the limiting correction. The basic requirements and noise with measurements spectral about This application note provides information | | | Products: Note Application Correction Noise with Range Dynamic Improved R&S R&S R&S FSQ FSU FSG Application Note Kay-Uwe Sander Nov. 2010-1EF76_0E Table of Contents Table of Contents 1 Overview ................................................................................. 3 2 Dynamic Range Limitations .................................................. 3 3 Signal Processing - Noise Correction .................................. 4 3.1 Evaluation of the noise level.......................................................................4 3.2 Details of the noise correction....................................................................5 4 Measurement Examples ........................................................ 7 4.1 Extended dynamic range with noise correction .......................................7 4.2 Low level measurements on noise-like signals ........................................8 4.3 Measurements at the theoretical limits....................................................10 5 Literature............................................................................... 11 6 Ordering Information ........................................................... 11 1EF76_0E Rohde & Schwarz -
Logarithmic Image Sensor for Wide Dynamic Range Stereo Vision System
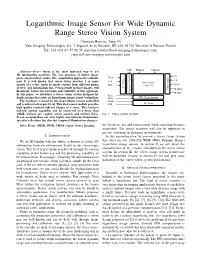
Logarithmic Image Sensor For Wide Dynamic Range Stereo Vision System Christian Bouvier, Yang Ni New Imaging Technologies SA, 1 Impasse de la Noisette, BP 426, 91370 Verrieres le Buisson France Tel: +33 (0)1 64 47 88 58 [email protected], [email protected] NEG PIXbias COLbias Abstract—Stereo vision is the most universal way to get 3D information passively. The fast progress of digital image G1 processing hardware makes this computation approach realizable Vsync G2 Vck now. It is well known that stereo vision matches 2 or more Control Amp Pixel Array - Scan Offset images of a scene, taken by image sensors from different points RST - 1280x720 of view. Any information loss, even partially in those images, will V Video Out1 drastically reduce the precision and reliability of this approach. Exposure Out2 In this paper, we introduce a stereo vision system designed for RD1 depth sensing that relies on logarithmic image sensor technology. RD2 FPN Compensation The hardware is based on dual logarithmic sensors controlled Hsync and synchronized at pixel level. This dual sensor module provides Hck H - Scan high quality contrast indexed images of a scene. This contrast indexed sensing capability can be conserved over more than 140dB without any explicit sensor control and without delay. Fig. 1. Sensor general structure. It can accommodate not only highly non-uniform illumination, specular reflections but also fast temporal illumination changes. Index Terms—HDR, WDR, CMOS sensor, Stereo Imaging. the details are lost and consequently depth extraction becomes impossible. The sensor reactivity will also be important to prevent saturation in changing environments. -

Receiver Dynamic Range: Part 2
The Communications Edge™ Tech-note Author: Robert E. Watson Receiver Dynamic Range: Part 2 Part 1 of this article reviews receiver mea- the receiver can process acceptably. In sim- NF is the receiver noise figure in dB surements which, taken as a group, describe plest terms, it is the difference in dB This dynamic range definition has the receiver dynamic range. Part 2 introduces between the inband 1-dB compression point advantage of being relatively easy to measure comprehensive measurements that attempt and the minimum-receivable signal level. without ambiguity but, unfortunately, it to characterize a receiver’s dynamic range as The compression point is obvious enough; assumes that the receiver has only a single a single number. however, the minimum-receivable signal signal at its input and that the signal is must be identified. desired. For deep-space receivers, this may be COMPREHENSIVE MEASURE- a reasonable assumption, but the terrestrial MENTS There are a number of candidates for mini- mum-receivable signal level, including: sphere is not usually so benign. For specifi- The following receiver measurements and “minimum-discernable signal” (MDS), tan- cation of general-purpose receivers, some specifications attempt to define overall gential sensitivity, 10-dB SNR, and receiver interfering signals must be assumed, and this receiver dynamic range as a single number noise floor. Both MDS and tangential sensi- is what the other definitions of receiver which can be used both to predict overall tivity are based on subjective judgments of dynamic range do. receiver performance and as a figure of merit signal strength, which differ significantly to compare competing receivers. -

For the Falcon™ Range of Microphone Products (Ba5105)
Technical Documentation Microphone Handbook For the Falcon™ Range of Microphone Products Brüel&Kjær B K WORLD HEADQUARTERS: DK-2850 Nærum • Denmark • Telephone: +4542800500 •Telex: 37316 bruka dk • Fax: +4542801405 • e-mail: [email protected] • Internet: http://www.bk.dk BA 5105 –12 Microphone Handbook Revision February 1995 Brüel & Kjær Falcon™ Range of Microphone Products BA 5105 –12 Microphone Handbook Trademarks Microsoft is a registered trademark and Windows is a trademark of Microsoft Cor- poration. Copyright © 1994, 1995, Brüel & Kjær A/S All rights reserved. No part of this publication may be reproduced or distributed in any form or by any means without prior consent in writing from Brüel & Kjær A/S, Nærum, Denmark. 0 − 2 Falcon™ Range of Microphone Products Brüel & Kjær Microphone Handbook Contents 1. Introduction....................................................................................................................... 1 – 1 1.1 About the Microphone Handbook............................................................................... 1 – 2 1.2 About the Falcon™ Range of Microphone Products.................................................. 1 – 2 1.3 The Microphones ......................................................................................................... 1 – 2 1.4 The Preamplifiers........................................................................................................ 1 – 8 1 2. Prepolarized Free-field /2" Microphone Type 4188....................... 2 – 1 2.1 Introduction ................................................................................................................ -

Receiver Sensitivity and Equivalent Noise Bandwidth Receiver Sensitivity and Equivalent Noise Bandwidth
11/08/2016 Receiver Sensitivity and Equivalent Noise Bandwidth Receiver Sensitivity and Equivalent Noise Bandwidth Parent Category: 2014 HFE By Dennis Layne Introduction Receivers often contain narrow bandpass hardware filters as well as narrow lowpass filters implemented in digital signal processing (DSP). The equivalent noise bandwidth (ENBW) is a way to understand the noise floor that is present in these filters. To predict the sensitivity of a receiver design it is critical to understand noise including ENBW. This paper will cover each of the building block characteristics used to calculate receiver sensitivity and then put them together to make the calculation. Receiver Sensitivity Receiver sensitivity is a measure of the ability of a receiver to demodulate and get information from a weak signal. We quantify sensitivity as the lowest signal power level from which we can get useful information. In an Analog FM system the standard figure of merit for usable information is SINAD, a ratio of demodulated audio signal to noise. In digital systems receive signal quality is measured by calculating the ratio of bits received that are wrong to the total number of bits received. This is called Bit Error Rate (BER). Most Land Mobile radio systems use one of these figures of merit to quantify sensitivity. To measure sensitivity, we apply a desired signal and reduce the signal power until the quality threshold is met. SINAD SINAD is a term used for the Signal to Noise and Distortion ratio and is a type of audio signal to noise ratio. In an analog FM system, demodulated audio signal to noise ratio is an indication of RF signal quality. -

Signal-To-Noise Ratio and Dynamic Range Definitions
Signal-to-noise ratio and dynamic range definitions The Signal-to-Noise Ratio (SNR) and Dynamic Range (DR) are two common parameters used to specify the electrical performance of a spectrometer. This technical note will describe how they are defined and how to measure and calculate them. Figure 1: Definitions of SNR and SR. The signal out of the spectrometer is a digital signal between 0 and 2N-1, where N is the number of bits in the Analogue-to-Digital (A/D) converter on the electronics. Typical numbers for N range from 10 to 16 leading to maximum signal level between 1,023 and 65,535 counts. The Noise is the stochastic variation of the signal around a mean value. In Figure 1 we have shown a spectrum with a single peak in wavelength and time. As indicated on the figure the peak signal level will fluctuate a small amount around the mean value due to the noise of the electronics. Noise is measured by the Root-Mean-Squared (RMS) value of the fluctuations over time. The SNR is defined as the average over time of the peak signal divided by the RMS noise of the peak signal over the same time. In order to get an accurate result for the SNR it is generally required to measure over 25 -50 time samples of the spectrum. It is very important that your input to the spectrometer is constant during SNR measurements. Otherwise, you will be measuring other things like drift of you lamp power or time dependent signal levels from your sample. -

High Dynamic Range Ultrasound Imaging
The final publication is available at http://link.springer.com/article/10.1007/s11548-018-1729-3 Int J CARS manuscript No. (will be inserted by the editor) High Dynamic Range Ultrasound Imaging Alperen Degirmenci · Douglas P. Perrin · Robert D. Howe Received: 26 January 2018 Abstract Purpose High dynamic range (HDR) imaging is a popular computational photography technique that has found its way into every modern smartphone and camera. In HDR imaging, images acquired at different exposures are combined to increase the luminance range of the final image, thereby extending the limited dynamic range of the camera. Ultrasound imaging suffers from limited dynamic range as well; at higher power levels, the hyperechogenic tissue is overexposed, whereas at lower power levels, hypoechogenic tissue details are not visible. In this work, we apply HDR techniques to ultrasound imaging, where we combine ultrasound images acquired at different power levels to improve the level of detail visible in the final image. Methods Ultrasound images of ex vivo and in vivo tissue are acquired at different acoustic power levels and then combined to generate HDR ultrasound (HDR-US) images. The performance of five tone mapping operators is quantitatively evaluated using a similarity metric to determine the most suitable mapping for HDR-US imaging. Results The ex vivo and in vivo results demonstrated that HDR-US imaging enables visualizing both hyper- and hypoechogenic tissue at once in a single image. The Durand tone mapping operator preserved the most amount of detail across the dynamic range. Conclusions Our results strongly suggest that HDR-US imaging can improve the utility of ultrasound in image-based diagnosis and procedure guidance. -

AN10062 Phase Noise Measurement Guide for Oscillators
Phase Noise Measurement Guide for Oscillators Contents 1 Introduction ............................................................................................................................................. 1 2 What is phase noise ................................................................................................................................. 2 3 Methods of phase noise measurement ................................................................................................... 3 4 Connecting the signal to a phase noise analyzer ..................................................................................... 4 4.1 Signal level and thermal noise ......................................................................................................... 4 4.2 Active amplifiers and probes ........................................................................................................... 4 4.3 Oscillator output signal types .......................................................................................................... 5 4.3.1 Single ended LVCMOS ........................................................................................................... 5 4.3.2 Single ended Clipped Sine ..................................................................................................... 5 4.3.3 Differential outputs ............................................................................................................... 6 5 Setting up a phase noise analyzer ........................................................................................................... -

Noise Reduction by Cross-Correlation
Application Note Noise reduction by parallel Zurich cross-correlation measurements Instruments Applications: Nanoelectronics, Materials Characterization, Low-Temperature Physics, Transport Measurements, DC SQUID Products: MFLI, MFLI-DIG, MDS Release date: May 2019 Introduction 4 10 Studying noise processes can reveal fundamental infor- mation about a physical system; for example, its tem- perature [1, 2, 3],the quantization of charge carriers [4], 3 10 or the nature of many-body behavior [5]. Noise mea- surements are also critical for applications such as sensing, where the intrinsic noise of a detector defines its ultimate sensitivity. In this note, we will describe 100 a generic method for measuring the electronic noise of a device when the spectral density of its intrinsic noise is less than that of the measurement apparatus. 10 We implement the method using a pair of MFLI Lock-in Amplifiers, both with the Digitizer option MF-DIG. To demonstrate the measurement, we measure the 1 noise of a Superconducting Quantum Interference De- 100 101 102 103 104 105 106 vice (SQUID) magnetometer. Typically, SQUIDs are op- erated by supplying a DC bias current and measuring Figure 1. The voltage noise density at the Voltage Input of an MFLI a voltage and, as such, the limiting factor in the mea- Lock-in Amplifier plotted for available Input ranges [6]. surement is usually the noise floor of the voltage pre- amplifier. For a SQUID with gain (transfer function)p VΦ = 1 mV/Φ0 and targetp sensitivity of S = 1 μΦ0/ Hz, larly at low frequencies. One way of resolving signals a noise floor of 1 nV/ Hz is required. -

Uncovering Interference at a Co-Located 800 Mhz P25 Public Safety Communication System Case Study
Case Study Uncovering Interference at a Co-Located 800 MHz P25 Public Safety Communication System RTSA Spectrum Analyzer Key to Uncovering Hard-to-Find Cause Overview RF communication systems have become a critical part of modern life. These systems range from tiny Bluetooth® devices to nationwide, high-speed data systems to public safety critical infrastructure. Because these communication systems share common RF spectrum, interference between them is inevitable. Interference between systems can range from intermittent outages that can cause dropped calls to complete blockage of communication. Resolving these issues requires testing of the system with a test RF receiver or spectrum analyzer to detect and locate the source of interference within the system. 1 Challenge A public safety organization in northern Nevada was experiencing intermittent receive interference alarms on its 800 MHz P25 public safety communications system. An ordinary swept-tuned spectrum analyzer was used in an attempt to locate the interfering signals, however, none were found. After determining it was not a software issue, it was decided that the cause of the issue was likely to be an interfering signal with short duration or even a hopping signal that was being missed by the spectrum analyzer. A spectrum analyzer with real-time spectrum analysis (RTSA) was needed to be utilized to look for any interfering signals. Solution Anritsu’s Field Master Pro™ MS2090A solution with real-time spectrum analyzer option was selected to locate the interfering signal (Figure 1). The Field Master Pro MS2090A has an optional real-time mode that can accurately measure the amplitude of a single spectrum event as short as 2 µs, and detect a single event as short as 5 ns. -
Understanding Microphone Sensitivity by Jerad Lewis
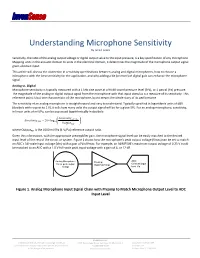
Understanding Microphone Sensitivity By Jerad Lewis Sensitivity, the ratio of the analog output voltage or digital output value to the input pressure, is a key specification of any microphone. Mapping units in the acoustic domain to units in the electrical domain, it determines the magnitude of the microphone output signal given a known input. This article will discuss the distinction in sensitivity specifications between analog and digital microphones, how to choose a microphone with the best sensitivity for the application, and why adding a bit (or more) of digital gain can enhance the microphone signal. Analog vs. Digital Microphone sensitivity is typically measured with a 1 kHz sine wave at a 94 dB sound pressure level (SPL), or 1 pascal (Pa) pressure. The magnitude of the analog or digital output signal from the microphone with that input stimulus is a measure of its sensitivity. This reference point is but one characteristic of the microphone, by no means the whole story of its performance. The sensitivity of an analog microphone is straightforward and easy to understand. Typically specified in logarithmic units of dBV (decibels with respect to 1 V), it tells how many volts the output signal will be for a given SPL. For an analog microphone, sensitivity, in linear units of mV/Pa, can be expressed logarithmically in decibels: Sensitivity = × mV / Pa Sensitivity dBV 20 log10 Output REF where OutputREF is the 1000 mV/Pa (1 V/Pa) reference output ratio. Given this information, with the appropriate preamplifier gain, the microphone signal level can be easily matched to the desired input level of the rest of the circuit or system.