Noise, Detectability, and Implications for System Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

MIKE JOY Race Announcer, FOX NASCAR
MIKE JOY Race Announcer, FOX NASCAR Broadcasting veteran Mike Joy brings 50 years of motor sports experience to the booth as lead race announcer for FOX NASCAR in 2020, his 20th consecutive season with the network, alongside NASCAR Hall of Famer Jeff Gordon. Joy has led the network’s broadcast team since 2001, FOX’s first year as a NASCAR broadcast partner. Joy has broadcast most major forms of American motorsports for television and radio. Prior to joining FOX in 2001, Joy anchored CBS Sports’ coverage of the DAYTONA 500 from 1998-2000 after earning his stripes as a pit reporter for 15 years. In addition, Joy called the “Great American Race” for Motor Racing Network (MRN) Radio from 1977-’83 (as a turn announcer and anchor). The season-opening DAYTONA 500 marks the 41st DAYTONA 500 for which he has been part of live TV or radio coverage. In 2020, Joy covers his 45th Daytona Speedweeks. He is a charter member of the prestigious NASCAR Hall of Fame Voting Panel, and in December 2013, was named sole media representative on the Hall's exclusive Nominating Committee. Joy previously served on the voting panel for the International Motorsports Hall of Fame. Joy was the 2011 recipient of the esteemed Henry T. McLemore Motorsports Journalism Award, recognizing career excellence in the field, as well as the 2018 North Carolina Motorsports Association (NCMA) Jim Hunter Memorial Media Award. A former vice president of the National Motorsport Press Association, Joy joined Chris Economaki as the first racing journalists to receive major recognition for their work in all three major disciplines: radio, television and print. -

Fox Sports Highlights – 3 Things You Need to Know
FOR IMMEDIATE RELEASE Wednesday, Sept. 17, 2014 FOX SPORTS HIGHLIGHTS – 3 THINGS YOU NEED TO KNOW NFL: Philadelphia Hosts Washington and Dallas Meets St. Louis in Regionalized Matchups COLLEGE FOOTBALL: No. 4 Oklahoma Faces West Virginia in Big 12 Showdown on FOX MLB: AL Central Battle Between Tigers and Royals, Plus Dodgers vs. Cubs in FOX Saturday Baseball ******************************************************************************************************* NFL DIVISIONAL MATCHUPS HIGHLIGHT WEEK 3 OF THE NFL ON FOX The NFL on FOX continues this week with five regionalized matchups across the country, highlighted by three divisional matchups, as the Philadelphia Eagles host the Washington Redskins, the Detroit Lions welcome the Green Bay Packers, and the San Francisco 49ers play at the Arizona Cardinals. Other action this week includes the Dallas Cowboys at St. Louis Rams and Minnesota Vikings at New Orleans Saints. FOX Sports’ NFL coverage begins each Sunday on FOX Sports 1 with FOX NFL KICKOFF at 11:00 AM ET with host Joel Klatt and analysts Donovan McNabb and Randy Moss. On the FOX broadcast network, FOX NFL SUNDAY immediately follows FOX NFL KICKOFF at 12:00 PM ET with co-hosts Terry Bradshaw and Curt Menefee alongside analysts Howie Long, Michael Strahan, Jimmy Johnson, insider Jay Glazer and rules analyst Mike Pereira. SUNDAY, SEPTEMBER 21 GAME PLAY-BY-PLAY/ANALYST/SIDELINE COV. TIME (ET) Washington Redskins at Philadelphia Eagles Joe Buck, Troy Aikman 24% 1:00PM & Erin Andrews Lincoln Financial Field – Philadelphia, Pa. MARKETS INCLUDE: Los Angeles, Philadelphia, Washington, Miami, Raleigh, Charlotte, Hartford, Greenville, West Palm Beach, Norfolk, Greensboro, Richmond, Knoxville Green Bay Packers at Detroit Lions Kevin Burkhardt, John Lynch 22% 1:00PM & Pam Oliver Ford Field – Detroit, Mich. -

Behind the Scenes: COVID-19 Consequences on Broadcast Sports Production
International Journal of Sport Communication, 2020, 13, 484–493 https://doi.org/10.1123/ijsc.2020-0231 © 2020 Human Kinetics, Inc. SCHOLARLY COMMENTARY Behind the Scenes: COVID-19 Consequences on Broadcast Sports Production Roxane Coche and Benjamin J. Lynn University of Florida Live events are central to television production. Live sporting events, in particular, reliably draw big audiences, even though more consumers unsubscribe from cable to stream content on-demand. Traditionally, the mediated production of these sporting events have used technical and production crews working together on- site at the event. But technological advances have created a new production model, allowing the production crew to cover the event from a broadcast production hub, miles away, while the technical crew still works from the event itself. These remote integration model productions have been implemented around the world and across all forms of sports broadcasting, following a push for economic efficiency—fundamental in a capitalist system. This manu- script is a commentary on the effects of the COVID-19 global crisis on sports productions, with a focus on remote integration model productions. More specifically, the authors argue that the number of remote sports productions will grow exponentially faster, due to the pandemic, than they would have under normal economic circumstances. The consequences on sport media education and research are further discussed, and a call for much needed practice-based sports production research is made. Keywords: education, live sports, REMI NASCAR (the National Association for Stock Car Auto Racing) returned to racing in Darlington, South Carolina, on May 17, 2020, more than 2 months after the last pre-COVID-19 event, on March 8. -
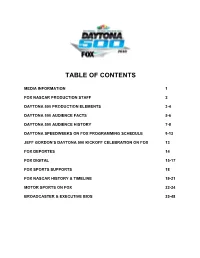
Table of Contents
TABLE OF CONTENTS MEDIA INFORMATION 1 FOX NASCAR PRODUCTION STAFF 2 DAYTONA 500 PRODUCTION ELEMENTS 3-4 DAYTONA 500 AUDIENCE FACTS 5-6 DAYTONA 500 AUDIENCE HISTORY 7-8 DAYTONA SPEEDWEEKS ON FOX PROGRAMMING SCHEDULE 9-12 JEFF GORDON’S DAYTONA 500 KICKOFF CELEBRATION ON FOX 13 FOX DEPORTES 14 FOX DIGITAL 15-17 FOX SPORTS SUPPORTS 18 FOX NASCAR HISTORY & TIMELINE 19-21 MOTOR SPORTS ON FOX 22-24 BROADCASTER & EXECUTIVE BIOS 25-48 MEDIA INFORMATION The FOX NASCAR Daytona 500 press kit has been prepared by the FOX Sports Communications Department to assist you with your coverage of this year’s “Great American Race” on Sunday, Feb. 21 (1:00 PM ET) on FOX and will be updated continuously on our press site: www.foxsports.com/presspass. The FOX Sports Communications staff is available to provide further information and facilitate interview requests. Updated FOX NASCAR photography, featuring new FOX NASCAR analyst and four-time NASCAR champion Jeff Gordon, along with other FOX on-air personalities, can be downloaded via the aforementioned FOX Sports press pass website. If you need assistance with photography, contact Ileana Peña at 212/556-2588 or [email protected]. The 59th running of the Daytona 500 and all ancillary programming leading up to the race is available digitally via the FOX Sports GO app and online at www.FOXSportsGO.com. FOX SPORTS ON-SITE COMMUNICATIONS STAFF Chris Hannan EVP, Communications & Cell: 310/871-6324; Integration [email protected] Lou D’Ermilio SVP, Media Relations Cell: 917/601-6898; [email protected] Erik Arneson VP, Media Relations Cell: 704/458-7926; [email protected] Megan Englehart Publicist, Media Relations Cell: 336/425-4762 [email protected] Eddie Motl Manager, Media Relations Cell: 845/313-5802 [email protected] Claudia Martinez Director, FOX Deportes Media Cell: 818/421-2994; Relations claudia.martinez@foxcom 2016 DAYTONA 500 MEDIA CONFERENCE CALL & REPLAY FOX Sports is conducting a media event and simultaneous conference call from the Daytona International Speedway Infield Media Center on Thursday, Feb. -
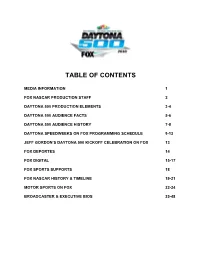
Table of Contents
TABLE OF CONTENTS MEDIA INFORMATION 1 FOX NASCAR PRODUCTION STAFF 2 DAYTONA 500 PRODUCTION ELEMENTS 3-4 DAYTONA 500 AUDIENCE FACTS 5-6 DAYTONA 500 AUDIENCE HISTORY 7-8 DAYTONA SPEEDWEEKS ON FOX PROGRAMMING SCHEDULE 9-12 JEFF GORDON’S DAYTONA 500 KICKOFF CELEBRATION ON FOX 13 FOX DEPORTES 14 FOX DIGITAL 15-17 FOX SPORTS SUPPORTS 18 FOX NASCAR HISTORY & TIMELINE 19-21 MOTOR SPORTS ON FOX 22-24 BROADCASTER & EXECUTIVE BIOS 25-48 MEDIA INFORMATION The FOX NASCAR Daytona 500 press kit has been prepared by the FOX Sports Communications Department to assist you with your coverage of this year’s “Great American Race” on Sunday, Feb. 21 (1:00 PM ET) on FOX and will be updated continuously on our press site: www.foxsports.com/presspass. The FOX Sports Communications staff is available to provide further information and facilitate interview requests. Updated FOX NASCAR photography, featuring new FOX NASCAR analyst and four-time NASCAR champion Jeff Gordon, along with other FOX on-air personalities, can be downloaded via the aforementioned FOX Sports press pass website. If you need assistance with photography, contact Ileana Peña at 212/556-2588 or [email protected]. The 59th running of the Daytona 500 and all ancillary programming leading up to the race is available digitally via the FOX Sports GO app and online at www.FOXSportsGO.com. FOX SPORTS ON-SITE COMMUNICATIONS STAFF Chris Hannan EVP, Communications & Cell: 310/871-6324; Integration [email protected] Lou D’Ermilio SVP, Media Relations Cell: 917/601-6898; [email protected] Erik Arneson VP, Media Relations Cell: 704/458-7926; [email protected] Megan Englehart Publicist, Media Relations Cell: 336/425-4762 [email protected] Eddie Motl Manager, Media Relations Cell: 845/313-5802 [email protected] Claudia Martinez Director, FOX Deportes Media Cell: 818/421-2994; Relations claudia.martinez@foxcom 2016 DAYTONA 500 MEDIA CONFERENCE CALL & REPLAY FOX Sports is conducting a media event and simultaneous conference call from the Daytona International Speedway Infield Media Center on Thursday, Feb. -

Daytona 500 Audience History ______17
Table of Contents Media Information ____________________________________________________2 Photography _________________________________________________________3 Production Staff ______________________________________________________4 Production Details __________________________________________________5 - 6 Valentine’s Day Daytona 500 Tale of the Tape _____________________________ 7 FOXSports.com at Daytona_____________________________________________ 8 NASCAR ON FOX Social Media _________________________________________ 9 Fox Sports Radio at Daytona _______________________________________10 – 11 FOX Sports Supports: Ronald McDonald House ___________________________12 NASCAR on FOX: 10th Season & Schedule ____________________________ 13-14 Daytona 500 & Sprint Cup Audience Facts____________________________ 15 - 16 Daytona 500 Audience History _________________________________________17 Broadcaster Biographies ___________________________________________18-27 MEDIA INFORMATION This guide has been prepared by the FOX Sports Communications Department to assist you with your coverage of the Daytona 500 on FOX and is accurate as of Feb. 8, 2010. The FOX Sports Communications staff is available to provide further information, photographs and facilitate interview requests. NASCAR on FOX photography, featuring Darrell Waltrip, Larry McReynolds, Mike Joy, Jeff Hammond, Chris Myers, Dick Berggren, Steve Byrnes, Krista Voda and Matt Yocum, is available on FOXFlash.com. Releases on FOX Sports’ NASCAR programming are available on www.msn.foxsports.com -

Fox Nascar Bestows Second-Annual 'The Byrnsie
FOR IMMEDIATE RELEASE Contact: Megan Englehart Sunday, June 26, 2016 [email protected] FOX NASCAR BESTOWS SECOND-ANNUAL ‘THE BYRNSIE AWARD’ UPON SPOTTER CHRIS OSBORNE Award in Honor of Steve Byrnes Given to Matt Kenseth’s Spotter on Sunday’s NASCAR RACEDAY on FS1 FOX NASCAR presented Chris Osborne, Matt Kenseth’s spotter, with the second-annual “The Byrnsie Award” during Sunday’s NASCAR RACEDAY telecast from Sonoma Raceway on FS1. Osborne, a veteran in the NASCAR garage, was sidelined the first part of the 2016 season after sustaining serious injuries in an accident with a drunk driver during the holidays. In honor of late FOX NASCAR broadcaster Steve Byrnes, whose nickname was ‘Byrnsie,’ the award was established in 2015 to celebrate an individual in the NASCAR SPRINT CUP SERIES who embodies principles Byrnes demonstrated daily in his personal and professional life -- preparation, teamwork and family within the garage area. Osbourne was voted the recipient by Byrnes’ colleagues on the FOX NASCAR broadcast team, of which he was a member since the first race broadcast in February 2001. Byrnes passed away in April 2015 following a courageous battle with cancer. Bryson Byrnes, Steve’s son, introduced the award on-camera from the NASCAR RACE HUB studios in Charlotte, N.C., while FOX NASCAR play-by-play announcer Mike Joy presented the trophy to Osborne on the spotters’ stand at Sonoma Raceway. “The winner of this year’s FOX Byrnsie Award is spotter Chris Osborne, who like my dad, displaced tremendous amounts of strength, courage and determination this year in the garage,” Bryson said on NASCAR RACEDAY. -

Fox Sports Notes, Quotes & Anecdotes
FOX SPORTS NOTES, QUOTES & ANECDOTES MLB & NASCAR Doubleheader This Saturday at Special 3:00 PM ET Start Time BoSox Welcome WS Champ Yanks to Beantown & NL Champs Host a Phenom Rosenthal: If Ortiz Doesn’t Turn It Around, Boston May Have To Release Him CHAMPS AND RIVAL GET TOGETHER IN BEANTOWN – The FOX SATURDAY BASEBALL GAME OF THE WEEK kicks off another FOX Sports MLB-to-NASCAR doubleheader with two hard- hitting matchups Saturday, May 8 (3:00 PM ET). CC Sabathia leads the World Champion Yankees in another clash with their heated rivals when they take on Dustin Pedroia and the Red Sox. In Philadelphia, Ryan Howard and the Phillies host rookie sensation Jason Heyward and the Braves. Atlanta’s right fielder has been an instant success leading the team in HR, RBI and OBP. This week, the pregame show originates live from Fenway Park in Boston, MA with host Chris Rose . Once game action begins, Rose joins the game crew including Joe Buck , Tim McCarver and Ken Rosenthal as a field reporter. For instant updates throughout the week and during games from the entire MLB on FOX crew, follow us on Twitter at http://twitter.com/MLBONFOX . Fans can gain more access to exclusive FOX Sports content by logging on to www.facebook.com/foxsports and www.myspace.com/foxsports . KEN ROSENTHAL: “BOSTON’S PROBLEM IS AS MUCH EXTERNAL AS INTERNAL” – With the Red Sox facing the red-hot Yankees this weekend and already 6.5 games back in the AL East, MLB on FOX and FOXSports.com’s reporter Ken Rosenthal weighs in on Boston’s challenging road ahead: “The challenges that face Boston are as much external as internal,” said Rosenthal. -

CHICKENS Manrhphtpr IE Nixon Backs Tax Credits
^4 PAGE TWENTY„^MANCHESTE« EVENING HERALD. Mancheiter, Conn., Tues,, Oct. 24,1972 South Winckor The W egthar Natls Urges Tax Relief Police Report High Smoking leone Clearing tonight, lowi in the mid See Page 3 manrhpHtpr IE to upper SOi. Moitly innny with operating under the in From Revenue Sharing MANCHESTER Peaslee’s car w u In collision Thursday, highs 55 to 60. with a car driven by Janet L. fluence of liquor or drugs and NEW SEASON Gilbert Wittman, 64, of 18 state Comptroller Nathan G. and “ Reducing the property tax Hollister St., was reported Iq Rosol, 19, of East Hartford. The reckleu driving on Rt. 30. Agostinelli has urged the Boaird by approximately two mills, for accident, at about 10:15 p.m., Police said Kramer almost MANCHESTER — A City o f Village Charm critical condition this morning at MANCHESTER, CONN., WEDNESDAY, OCTOBER 25,1972 VOL. XCH. No. 21 of Directors to use part of the all Manchester lunperty owners, Manchester Memorial Hospital, occurred at W. Middle ’Tpke. and collided with several other cars THIR’TY-SIX PAGES - ’TWO SECTIONS PRICE pirn oN ciM f town’s share of the Revenue effective Jpn. 1, 19W.” with injuries he suffered in a Downey Dr. arid then went off the left side of the road and onto the lawn of a Sharing Bill to effect some relief Prefacing his suggestions, Monday morning accident at Peaslee was released on a |150 home at Rt. 30 and Meadowlark In the local tax burden. Agostinelli com m ent^ that of Charter Oak and Autumn Sts. -

Fox Sports Highlights – 3 Things You Need to Know
FOR IMMEDIATE RELEASE Wednesday, Sept. 24, 2014 FOX SPORTS HIGHLIGHTS – 3 THINGS YOU NEED TO KNOW NFL on FOX: AMERICA’S GAME OF THE WEEK Returns with Eagles at 49ers COLLEGE FOOTBALL: Battle of Ranked Teams on FOX Sports 1 as No. 11 UCLA Takes on No. 15 Arizona State in Pac-12 South Battle UFC: THE ULTIMATE FIGHTER Features No. 4 Penne and No. 3 Ellis Vying for Quarterfinal Spot Tonight on FOX Sports 1 #ICYMI: Grand Jury Decides Three-Time NASCAR Champion Tony Stewart Will Not Face Charges in On-Track Death of Fellow Racer Kevin Ward Jr. http://foxs.pt/1uHlgrF ************************************************************************************************************* STUDIO FOX SPORTS LIVE – MLB RACES DRAW TO EXCITING FINISH, COVERAGE OF JETER’S FINAL SERES, THURSDAY NIGHT COLLEGE FOOTBALL POSTGAME, RYDER CUP UPDATES, DAILY NFL REPORTS Network/When: FOX Sports 1 & FOX Sports GO, nightly (11:00 PM ET) Talent: Jay Onrait, Dan O’Toole, Charissa Thompson, Cole Wright, Ryan Field, Jay Glazer, Gabe Kapler, Joel Klatt, Matt Leinart, Donovan McNabb, Randy Moss, Petros Papadakis, Brady Quinn, Bill Reiter, Ephraim Salaam, Peter Schrager, Clay Travis. This Week: With both the college and pro football season in full swing, FOX SPORTS LIVE has all the action covered with nightly news and analysis from a host of contributors. This week’s college football schedule is highlighted by Thursday night’s Pac-12 showdown between No. 11 UCLA and No. 15 Arizona State on FOX Sports 1, and analyst Joel Klatt, on-site to call the matchup, delivers a live post-game hit from Sun Devil Stadium. With the MLB regular season reaching its hotly contested finish, nightly highlights and analysis continue with analyst Gabe Kapler in studio breaking down all the significant action and previewing the Wild Card play-in games and potential Division Series matchups. -

Fox Sports Redesigns Nascar Coverage for 2016
FOR IMMEDIATE RELEASE Wednesday, Nov. 18, 2015 FOX SPORTS REDESIGNS NASCAR COVERAGE FOR 2016 Gordon/Waltrip/Joy Headline Deep On-Air Lineup Vince Welch Named New NASCAR CAMPING WORLD TRUCK SERIES Voice Charlotte, N.C. – As NASCAR prepares to crown its national series champions this weekend at Homestead-Miami Speedway, FOX NASCAR already has begun preparations for the 2016 season, announcing today its full broadcaster lineup for next year, including a new NASCAR SPRINT CUP SERIES team featuring veteran play-by-play announcer Mike Joy and analysts Darrell Waltrip, together for their 16th season, and newcomer and four-time champion Jeff Gordon, plus new NASCAR CAMPING WORLD TRUCK SERIES play-by-play announcer Vince Welch. Waltrip, a NASCAR Hall of Famer, and Gordon, currently campaigning for his fifth title in 2015, combine for seven Cup Series championships and 177 series wins, while Joy marks his 30th year as a NASCAR broadcaster. The FOX NASCAR deck is stacked well beyond the booth, though, with veteran crew chief Larry McReynolds returning for his 16th year with the network, providing in-race analysis during each event armed with 40 years in the sport. “In 2016, we have the unique opportunity to take a four-time champion, Jeff Gordon, directly from the Chase to the booth, pairing him with Darrell Waltrip to offer fans seven championships’ worth of expertise,” said Eric Shanks, President and COO, Executive Producer, FOX Sports. “Led by Mike Joy, one of the sport’s most talented play-by-play announcers ever, there is a ton of enthusiasm building around our 2016 talent lineup.” The team is joined on pit road by reporters Jamie Little, Chris Neville, Welch and Matt Yocum. -

Cash Box NY FEATURES Telex; 866123 Coast to Coast 14 Fuji Speedway Serves As the HOLLYWOOD Editorial
ORDERS MOUNT FOR SONY CD ITA PROBES AUDIO, VIDEO ISSUES > MID-PRiCED VIDEOS PROLIFERATING AOE PREVIEW MSiiiSIT: Dynamite in the rack* From the moment he burst onto the record scene with his fantastic LP, “Reality—What A Concept,” Robin Williams has won the hearts and smiles of millions of adoring fans. And now, you can give them what they’ve been waiting for—“Throbbing Python of Love”—an explosive live album that captures all the excitement and quick-witted hilarity of a sell-out Robin Williams performance. Put it in your rack today. Manufaclured and Markeied by PolyGram Records Produced by Phil Galdston. Watch Robin Williams now in concert on HBO. Casablanca Records #811 150-1 M-l © 1983, PolyGram Records, Inc. .. BOX 1983 / COIN MACHINEdSH/ HOME ENTERTAINMENT WEEKLY VOLUME XLIV — NUMBER 42 — March 19, THE^ERNATiONAL MUSIC Off To A Good Start I OISHBCK EDITORML aEOROi ALRERT President and Publisher While it is certainly too early to draw any sweeping con- the revolution in the recording industry that so many have ALAN SUfToST™"”” triggered by the CD could come to Vice President and Editor In Chief clusions, the initial reaction to the Compact Disc (CD) predicted would be MARK ALRERT system has been most encouraging. Already a hit in pass. Vico President and General Manager Japan and parts of Europe, this week’s news that the in- That this is a distinct possibility is reflected in the fact label or group of labels has TirCARMlCLi itial orders for the Sony CD system in the U.S. are more that nearly every major Vice President and General Manager, East Coast than dealers can handle could brighten the outlook of already made a commitment to move into the CD even the most cynical.