Exploring Polyrhythms, Polymeters, and Polytempi with the Universal Grid Sequencer Framework
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PD1: Sequencer
21M.380 Music and Technology Sound Design Pd assignment 1 (pd1) Sequencer Due: Monday, February 22, 2016, 9:30am Submit to: MIT Learning Modules Assignments 5% of total grade 1 Instructions Build a music sequencer in Pure Data. If you do not know what a sequencer is, the Online Sequencer1 will give you a practical under- 1 http://onlinesequencer.net/ standing very quickly. 2 Restrictions • Only Pd objects from Pd vanilla are allowed. Submissions that rely on objects from Pd extended will not be accepted! • Messages, number boxes, GUI elements, symbols, arrays, tables, and comments of all kinds are allowed. • Your patch should not rely on any external hardware besides keyboard and mouse. This rules out any MIDI controllers. 3 Guidelines 3.1 Programming guidelines It might help to think of your sequencer as an engineering problem in three parts and address them in the following order: Sound design Start by trying to build some interesting sounds that can be tested in isolation. Use the three simple sounds from figure 1 as a starting point and create additional sounds by adjusting the parameters in that patch as instructed. Try to introduce variety and come up with something that sounds interesting! 2 Time base Consult our main textbook for inspiration on how 2 Farnell 2010. to provide a time base that organizes the playback of your 1 of 4 21M.380, pd1 assignment HOW TO RUN THIS PATCH: ; 1 Turn on DSP by clicking this in run mode: pd dsp 1 2 In run mode, click either of the two [bang( messages or the square toggle box below 3 Adjust the numbers as instructed to create different sounds. -

Music and Tone Sequencer
Music and Tone Sequencer Annie Zhang Boris Chan Cindy Wang Ryan Kim Cornell University Cornell University Cornell University Cornell University Ithaca, NY, USA Ithaca, NY, USA Ithaca, NY, USA Ithaca, NY, USA [email protected] [email protected] [email protected] [email protected] INTRODUCTION grid are set up such that the lower five rows represent The goal of this project is to design a music one full octave while the three remaining higher rows sequencer device that can be used to generate musical represent half an octave. By pressing any of the patterns and rhythms of varying tones and sounds. buttons of their choice, users can effectively create The device will be able to generate a musical patterns of buttons that correlated to rhythms of notes sequence whose notes and rhythm are determined by within a pentatonic scale. a pattern of buttons activated by the user; users can choose which notes to activate by interacting with a Our ultimate design goals consisted of developing an button pad present on the top of the device. The intuitive device that would allow individuals purpose of this project to twofold: firstly it is meant unfamiliar with music theory to still create music. We to help individuals experience music creation without aimed to develop a neat, fully functional prototype needing a background in music, and secondly it can that can correctly process button input, emit sounds, cultivate interaction and social bonding between and accept volume control. individuals by having them work together to generate music without much effort. For example, the device can be used to teach young children about the RELATED WORK fundamentals of chords and rhythm by having them The inspiration of our project stemmed from an see how buttons activate different sounds, which online pentatonic step sequencer [8]. -

MUSIC PRODUCTION GUIDE Official News Guide from Yamaha & Easy Sounds for Yamaha Music Production Instruments
MUSIC PRODUCTION GUIDE OFFICIAL NEWS GUIDE FROM YAMAHA & EASY SOUNDS FOR YAMAHA MUSIC PRODUCTION INSTRUMENTS 04|2014 SPECIAL EDITION Contents 40th Anniversary Yamaha Synthesizers 3 40 years Yamaha Synthesizers The history 4 40 years Yamaha Synthesizers Timeline 5 40th Anniversary Special Edition MOTIF XF White 23 40th Anniversary Box MOTIF XF 28 40th Anniversary discount coupons 30 40th Anniversary MX promotion plan 31 40TH 40th Anniversary app sales plan 32 ANNIVERSARY Sounds & Goodies 36 YAMAHA Imprint 41 SYNTHESIZERS 40 YEARS OF INSPIRATION YAMAHA CELEBRATES 40 YEARS IN SYNTHESIZER-DESIGN WITH BRANDNEW MOTIF XF IN A STUNNIG WHITE FINISH SARY PRE ER M V IU I M N N B A O X H T 0 4 G N I D U L C N I • FL1024M FLASH MEMORY Since 1974 Yamaha has set new benchmarks in the design of excellent synthesizers and has developed • USB FLASH MEMORY (4GB) innovative tools of creativity. The unique sounds of the legendary SY1, VL1 and DX7 have influenced a INCL. SOUND LIBRARIES: whole variety of musical styles. Yamaha‘s know-how, inspiring technique and the distinctive sounds of a - CHICK’S MARK V - CS-80 40-years-experience are featured in the new MOTIF XF series that is now available in a very stylish - ULTIMATE PIANO COLLECTION white finish. - VINTAGE SYNTHESIZER COLLECTION YAMAHASYNTHSEU YAMAHA.SYNTHESIZERS.EU YAMAHASYNTHESIZEREU EUROPE.YAMAHA.COM MUSIC PRODUCTION GUIDE 04|2014 40TH ANNIVERSARY YAMAHA SYNTHESIZERS In 1974 Yamaha produced its first portable Yamaha synthesizers and workstations were and still are analog synthesizer with the SY-1. The the first choice for professionals and amateurs in the multi- faceted music business. -

Computer Mediated Music Production: a Study of Abstraction and Activity
Computer mediated music production: A study of abstraction and activity by Matthew Duignan A thesis for the degree of Doctor of Philosophy in Computer Science. Victoria University of Wellington 2008 Abstract Human Computer Interaction research has a unique challenge in under- standing the activity systems of creative professionals, and designing the user-interfaces to support their work. In these activities, the user is involved in the process of building and editing complex digital artefacts through a process of continued refinement, as is seen in computer aided architecture, design, animation, movie-making, 3D modelling, interactive media (such as shockwave-flash), as well as audio and music production. This thesis exam- ines the ways in which abstraction mechanisms present in music production systems interplay with producers’ activity through a collective case study of seventeen professional producers. From the basis of detailed observations and interviews we examine common abstractions provided by the ubiqui- tous multitrack-mixing metaphor and present design implications for future systems. ii Acknowledgements I would like to thank my supervisors Robert Biddle and James Noble for their endless hours of guidance and feedback during this process, and most of all for allowing me to choose such a fun project. Michael Norris and Lissa Meridan from the Victoria University music department were also invaluable for their comments and expertise. I would also like to thank Alan Blackwell for taking the time to discuss my work and provide valuable advice. I am indebted to all of my participants for the great deal of time they selflessly offered, and the deep insights they shared into their professional world. -

A Users Guide to the Roland SE-02.Pages
3 OSCILLATOR ANALOG MONOPHONIC SYNTHESIZER SE-02 A USER’S GUIDE TO THE ROLAND/STUDIO ELECTRONICS SE-02 1 2 ACKNOWLEDGEMENTS: This manual was assembled, illustrated, and written by Sunshine Jones. All of the contents is taken from either his personal experience, existing documentation, and techniques submitted and found in the public domain. The document is intended as a companion guide for the Roland/Studio Electronics SE-02 Synthesizer Module. It is in no way offered as a criticism, or intended to be an authoritative guide to replace the official documentation which accompanies the commercial purchase of Roland Boutique, or Roland AIRA musical instruments. Rather, this manual is intended to support the musician, the user of these and other synthesizer modules and inspire them to create music, share sounds, and fully realize the synthesizers in front of them. In the tradition of owner’s manuals, rarely are they opened until problems arise. We tell you over and over again to RTFM, but do you listen? No, no you don’t. Manuals should be both tools for reference and instruction, as well as inspirational guides to possibility. An owner’s manual should be equally a pre purchase discovery, meant to inspire the curious with capability and possibility, and a post purchase celebration of depth, technique, guidance, and surprises. But this is by no means the last word. So many people have read and re read a manual only to still have no idea what the manual was attempting to suggest. This owner’s manual is offered free of charge to anyone curious, or frustrated by the tiny little leaflet which covers the operations of the SE-02 in several languages, as a legible alternative to the official documentation. -

SH-01A Manual.Pages
MONOPHONIC / POLYPHONIC / CHORD MACHINE SYNTHESIZER ローランド SH-01Aのユーザーガイド A USER’S GUIDE TO THE ROLAND SH-01A !1 !2 ACKNOWLEDGEMENTS: This manual was assembled, illustrated, and written by Sunshine Jones. All of the content is taken from either his personal experience, existing documentation, and techniques submitted and found in the public domain. The document is intended as a companion guide for the Roland SH-01A Synthesizer Module. It is in no way offered as a criticism, or intended to be an authoritative guide to replace the official documentation which accompanies the commercial purchase of Roland Boutique, or Roland AIRA musical instruments. Rather, this manual is intended to support the musician, the user of these and other synthesizer modules and inspire them to create music, share sounds, and fully realize the synthesizers in front of them. In the tradition of owner’s manuals, rarely are they opened until problems arise. We tell you over and over again to RTFM, but do you listen? No, no you don’t. Manuals should be both tools for reference and instruction, as well as inspirational guides to possibility. An owner’s manual should be equally a pre purchase discovery, meant to inspire the curious with capability and possibility, and a post purchase celebration of depth, technique, guidance, and surprises. But this is by no means the last word. So many people have read and re read a manual only to still have no idea what the manual was attempting to suggest. This owner’s manual is offered free of charge to anyone curious, or frustrated by the tiny little leaflet which covers the operations of the SH-01A in several languages, as a legible alternative to the official documentation. -

Musictronics for Audio to Midi Conversion MUSICTRONICS for AUDIO to MIDI CONVERSION
Musictronics For Audio To Midi Conversion MUSICTRONICS FOR AUDIO TO MIDI CONVERSION 1L.R.KARL MARX, 2I.GOGUL, 3A.MAHADEVAN, 4S.SASIKUMAR 1-4Electronics and Communication Engineering, Thiagarajar College of Engineering Thiruparankundram, Madurai, Tamil Nadu Abstract - The purpose of this paper is to convert an audio signal into MIDI. The overall idea is to output an instrument sound that plays the recorded human voice with accurate pitch and duration. This is a task requiring wider range of theoretical knowledge and their utilization in the practical part of the process. As a part of study, an algorithm has been designed and developed for implementing a real-time guitar tuner using Matlab, which outputs accurate frequency of the input signal and corrects it, if it is not in a perfect intonation. This idea has been extended to convert voice data into MIDI, for which another algorithm has been developed, and also hardware has been implemented. This technology has several music-related applications and is meant for musicians of all skill levels. One could also easily perform pitch corrections/alterations on MIDI data. MIDI is also useful in many areas, where one can apply different timbres to pitches (ex. use your voice to produce a guitar sound). Keywords – Music Analysis, Signal Processing, Fast Fourier Transform, MIDI, Microcontroller. reproduction. Music and sound technology refer to I. INTRODUCTION the use of sound engineering in both a commercial or leisurely/experimental manner. Music technology and Music technology is any technology, such as a sound technology may sometimes be classed as the computer, an effects unit or a piece of software, that same thing, but they actually refer to different fields is used by a musician to help make music, especially of work, the names of which are to some extent self- the use of electronic devices and computer software explanatory, but where sound engineering may refer to facilitate playback, recording, composition, storage, primarily to the use of sound technology for media- mixing, analysis, editing, and performance. -
Mobile Music Sequencer Owner's Manual
Mobile Music Sequencer Owner’s Manual • Copying of the commercially available music sequence data and/or digital audio files is strictly • The screen displays as illustrated in this Owner’s Manual are for instructional purposes, and may prohibited except for your personal use. appear somewhat different from the screens which appear on your devicer. • The software and this owner’s manual are exclusive copyrights of Yamaha Corporation. • Apple, iPad, iPhone, iPod touch and iTunes are trademarks of Apple Inc., registered in the U.S. and • Copying of the software or reproduction of this manual in whole or in part by any means is expressly other countries. forbidden without the written consent of the manufacturer. • The company names and product names in this Owner’s Manual are the trademarks or registered • Yamaha makes no representations or warranties with regard to the use of the software and trademarks of their respective companies. documentation and cannot be held responsible for the results of the use of this manual and the © 2013 Yamaha Corporation. All rights reserved. software. Introduction Coming with a wide range of phrases built-in, Mobile Music Sequencer can be used to create songs by arranging these phrases and entering chord sequences. Mobile Music Sequencer can actually create music in many different ways, but this manual will cover the standard approach, which comprises the following three steps. 1 Build sections by arranging phrases 2 Add chord sequences to the sections 3 Expand the sections to build songs Mobile Music Sequencer Owner’s Manual 1 1 Building Sections by Arranging Phrases 1. -

User Manual CMI V - Welcome 3 1.4
USER MANUAL Special Thanks Jean-Bernard Emond Marco Correia «Koshdukai» Neil Hester Tony Flying Squirrel Angel Alvarado Dwight Davies Florian Marin Paul Steinway Adrien Bardet Ruari Galbraith Terence Marsden George Ware Charles Capsis IV Simon Gallifet Fernando Manuel Stephen Wey Jeffrey M Cecil Reek N. Havok Rodrigues Chuck Zwick DIRECTION Frédéric Brun Kevin Molcard DEVELOPMENT Baptiste Aubry (lead) Matthieu Courouble Valentin Lepetit Benjamin Renard Mathieu Nocenti (lead) Raynald Dantigny Samuel Limier Stefano D'Angelo Pierre-Lin Laneyrie Germain Marzin Corentin Comte Baptiste Le Goff Pierre Pfister DESIGN Shaun Elwood Morgan Perrier Sebastien Rochard Greg Vezon SOUND DESIGN Jean-Baptiste Arthus Jean-Michel Blanchet Valentin Lepetit Stéphane Schott Corry Banks Maxime Dangles Laurent Paranthoën Edward Ten Eyck Clément Bastiat Roger Greenberg Greg Savage MANUAL Morgan Perrier Holger Steinbrink © ARTURIA SA – 2017 – All rights reserved. 11 Chemin de la Dhuy 38240 Meylan FRANCE www.arturia.com Information contained in this manual is subject to change without notice and does not represent a commitment on the part of Arturia. The software described in this manual is provided under the terms of a license agreement or non-disclosure agreement. The software license agreement specifies the terms and conditions for its lawful use. No part of this manual may be reproduced or transmitted in any form or by any purpose other than purchaser’s personal use, without the express written permission of ARTURIA S.A. All other products, logos or company names quoted in this manual are trademarks or registered trademarks of their respective owners. Product version: 1.0 Revision date: 4 December 2017 Thank you for purchasing CMI V! This manual covers the features and operation of Arturia’s CMI V, the latest in a long line of incredibly realistic virtual instruments. -
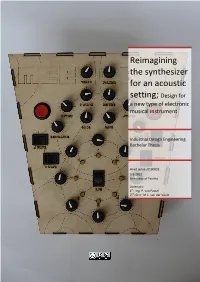
Design for a New Type of Electronic Musical Instrument
Reimagining the synthesizer for an acoustic setting; Design for a new type of electronic musical instrument Industrial Design Engineering Bachelor Thesis Arvid Jense s0180831 5-3-2013 University of Twente Assessors: 1st: Ing. P. van Passel 2nd: Dr.Ir. M.C. van der Voort Reimagining the synthesizer for an acoustic setting; Design for a new type of electronic musical instrument By: Arvid Jense S0180831 Industrial Design Engineering University of Twente Presentation: 5-3-2013 Contact: Create Digital Media/Meeblip Betahaus, to Peter Kirn Prinzessinnenstrasse 19-20 BERLIN, 10969 Germany www.creadigitalmusic.com www.meeblip.com Examination committee: Dr.Ir. M.C. van der Voort Ing. P. van Passel Peter Kirn ii iii ABSTRACT A design of a new type of electronic instrument was made to allow usage in a setting previously not suitable for these types of instrument. Following an open-ended design brief, an analysis of the Meeblip market, synthesizer design literature and three case-studies, a new usage scenario was chosen. The scenario describes a situation of spontaneous music creation at an outside location. A rapidly iterating design process produced a wooden, semi-computational operated synthesizer which has an integrated power supply, amplifier and speaker. Care was taken to allow for rich and musical interaction as well as making the sound quality of the instrument on a similar level as acoustic instruments. Keywords: Synthesizer design, Electronics design, Open source, Arduino, Meeblip, Interaction design SAMENVATTING (DUTCH) Een ontwerp is gemaakt voor een nieuw type elektronisch muziek instrument welke gebruikt kan worden in een setting die eerder niet geschikt was voor elektronische instrumenten. -

Electronics in Music Ebook, Epub
ELECTRONICS IN MUSIC PDF, EPUB, EBOOK F C Judd | 198 pages | 01 Oct 2012 | Foruli Limited | 9781905792320 | English | London, United Kingdom Electronics In Music PDF Book Main article: MIDI. In the 90s many electronic acts applied rock sensibilities to their music in a genre which became known as big beat. After some hesitation, we agreed. Main article: Chiptune. Pietro Grossi was an Italian pioneer of computer composition and tape music, who first experimented with electronic techniques in the early sixties. Music produced solely from electronic generators was first produced in Germany in Moreover, this version used a new standard called MIDI, and here I was ably assisted by former student Miller Puckette, whose initial concepts for this task he later expanded into a program called MAX. August 18, Some electronic organs operate on the opposing principle of additive synthesis, whereby individually generated sine waves are added together in varying proportions to yield a complex waveform. Cage wrote of this collaboration: "In this social darkness, therefore, the work of Earle Brown, Morton Feldman, and Christian Wolff continues to present a brilliant light, for the reason that at the several points of notation, performance, and audition, action is provocative. The company hired Toru Takemitsu to demonstrate their tape recorders with compositions and performances of electronic tape music. Other equipment was borrowed or purchased with personal funds. By the s, magnetic audio tape allowed musicians to tape sounds and then modify them by changing the tape speed or direction, leading to the development of electroacoustic tape music in the s, in Egypt and France. -

Synchronizing Sequencing Software to a Live Drummer
Andrew Robertson and Mark D. Plumbley Synchronizing Sequencing School of Electronic Engineering and Computer Science Queen Mary University of London Software to a Live Drummer Mile End Road London E1 4NS, UK {andrew.robertson, mark.plumbley} @eecs.qmul.ac.uk Abstract: This article presents a method of adjusting the tempo of a music software sequencer so that it remains synchronized with a drummer’s musical pulse. This allows music sequencer technology to be integrated into a band scenario without the compromise of using click tracks or triggering loops with a fixed tempo. Our design implements real-time mechanisms for both underlying tempo and phase adjustment using adaptable parameters that control its behavior. The aim is to create a system that responds to timing variations in the drummer’s playing but is also stable during passages of syncopation and fills. We present an evaluation of the system using a stochastic drum machine that incorporates a level of noise in the underlying tempo and phase of the beat. We measure synchronization error between the output of the system and the underlying pulse of the drum machine and contrast this with other real-time beat trackers. The software, B-Keeper, has been released as a Max for Live device, available online at www.b-keeper.org. Introduction and Motivation MIDI messages. Commercial sequencers include Ableton Live, Pro Tools, Logic Studio, Nuendo, and One challenge currently faced by rock and pop bands others. These programs provide an optional click is how to incorporate electronic and pre-recorded track when recording, thereby providing audible musical parts when playing live.