Musictronics for Audio to Midi Conversion MUSICTRONICS for AUDIO to MIDI CONVERSION
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PD1: Sequencer
21M.380 Music and Technology Sound Design Pd assignment 1 (pd1) Sequencer Due: Monday, February 22, 2016, 9:30am Submit to: MIT Learning Modules Assignments 5% of total grade 1 Instructions Build a music sequencer in Pure Data. If you do not know what a sequencer is, the Online Sequencer1 will give you a practical under- 1 http://onlinesequencer.net/ standing very quickly. 2 Restrictions • Only Pd objects from Pd vanilla are allowed. Submissions that rely on objects from Pd extended will not be accepted! • Messages, number boxes, GUI elements, symbols, arrays, tables, and comments of all kinds are allowed. • Your patch should not rely on any external hardware besides keyboard and mouse. This rules out any MIDI controllers. 3 Guidelines 3.1 Programming guidelines It might help to think of your sequencer as an engineering problem in three parts and address them in the following order: Sound design Start by trying to build some interesting sounds that can be tested in isolation. Use the three simple sounds from figure 1 as a starting point and create additional sounds by adjusting the parameters in that patch as instructed. Try to introduce variety and come up with something that sounds interesting! 2 Time base Consult our main textbook for inspiration on how 2 Farnell 2010. to provide a time base that organizes the playback of your 1 of 4 21M.380, pd1 assignment HOW TO RUN THIS PATCH: ; 1 Turn on DSP by clicking this in run mode: pd dsp 1 2 In run mode, click either of the two [bang( messages or the square toggle box below 3 Adjust the numbers as instructed to create different sounds. -

Exploring Polyrhythms, Polymeters, and Polytempi with the Universal Grid Sequencer Framework
Exploring Polyrhythms, Polymeters, and Polytempi with the Universal Grid Sequencer framework SAMUEL J. HUNT, Creative Technologies Laboratory Fig. 1. Large format grid controller, made from 4 smaller grid controllers Polyrhythms, Polymeters, and Polytempo are compositional techniques that describe pulses which are desynchronous between two or more sequences of music. Digital systems permit the sequencing of notes to a near-infinite degree of resolution, permitting an exponential number of complex rhythmic attributes in the music. Exploring such techniques within existing popular music sequencing software and notations can be challenging to generally work with and notate effectively. Step sequencers provide a simple and effective interface for exploring any arbitrary division of time into an even number of steps, with such interfaces easily expressible on grid based music controllers. The paper therefore has two differing but related outputs. Firstly, to demonstrate a framework for working with multiple physical grid controllers forming a larger unified grid, and provide a consolidated set of tools for programming music instruments forit. Secondly, to demonstrate how such a system provides a low-entry threshold for exploring Polyrhytms, Polymeters and Polytempo relationships using desynchronised step sequencers. CCS Concepts: • Human-centered computing → User interface programming; • Applied computing → Sound and music computing. Author’s address: Samuel J. Hunt, Creative Technologies Laboratory, UWE Bristol, [email protected]. 2020. Manuscript submitted to ACM Manuscript submitted to ACM 1 2 Samuel Hunt Additional Key Words and Phrases: Polyrhythm, Polymeter, Polytempo, Grid Controllers ACM Reference Format: Samuel J. Hunt. 2020. Exploring Polyrhythms, Polymeters, and Polytempi with the Universal Grid Sequencer framework. 1, 1 (November 2020), 11 pages. -

Music and Tone Sequencer
Music and Tone Sequencer Annie Zhang Boris Chan Cindy Wang Ryan Kim Cornell University Cornell University Cornell University Cornell University Ithaca, NY, USA Ithaca, NY, USA Ithaca, NY, USA Ithaca, NY, USA [email protected] [email protected] [email protected] [email protected] INTRODUCTION grid are set up such that the lower five rows represent The goal of this project is to design a music one full octave while the three remaining higher rows sequencer device that can be used to generate musical represent half an octave. By pressing any of the patterns and rhythms of varying tones and sounds. buttons of their choice, users can effectively create The device will be able to generate a musical patterns of buttons that correlated to rhythms of notes sequence whose notes and rhythm are determined by within a pentatonic scale. a pattern of buttons activated by the user; users can choose which notes to activate by interacting with a Our ultimate design goals consisted of developing an button pad present on the top of the device. The intuitive device that would allow individuals purpose of this project to twofold: firstly it is meant unfamiliar with music theory to still create music. We to help individuals experience music creation without aimed to develop a neat, fully functional prototype needing a background in music, and secondly it can that can correctly process button input, emit sounds, cultivate interaction and social bonding between and accept volume control. individuals by having them work together to generate music without much effort. For example, the device can be used to teach young children about the RELATED WORK fundamentals of chords and rhythm by having them The inspiration of our project stemmed from an see how buttons activate different sounds, which online pentatonic step sequencer [8]. -

MUSIC PRODUCTION GUIDE Official News Guide from Yamaha & Easy Sounds for Yamaha Music Production Instruments
MUSIC PRODUCTION GUIDE OFFICIAL NEWS GUIDE FROM YAMAHA & EASY SOUNDS FOR YAMAHA MUSIC PRODUCTION INSTRUMENTS 04|2014 SPECIAL EDITION Contents 40th Anniversary Yamaha Synthesizers 3 40 years Yamaha Synthesizers The history 4 40 years Yamaha Synthesizers Timeline 5 40th Anniversary Special Edition MOTIF XF White 23 40th Anniversary Box MOTIF XF 28 40th Anniversary discount coupons 30 40th Anniversary MX promotion plan 31 40TH 40th Anniversary app sales plan 32 ANNIVERSARY Sounds & Goodies 36 YAMAHA Imprint 41 SYNTHESIZERS 40 YEARS OF INSPIRATION YAMAHA CELEBRATES 40 YEARS IN SYNTHESIZER-DESIGN WITH BRANDNEW MOTIF XF IN A STUNNIG WHITE FINISH SARY PRE ER M V IU I M N N B A O X H T 0 4 G N I D U L C N I • FL1024M FLASH MEMORY Since 1974 Yamaha has set new benchmarks in the design of excellent synthesizers and has developed • USB FLASH MEMORY (4GB) innovative tools of creativity. The unique sounds of the legendary SY1, VL1 and DX7 have influenced a INCL. SOUND LIBRARIES: whole variety of musical styles. Yamaha‘s know-how, inspiring technique and the distinctive sounds of a - CHICK’S MARK V - CS-80 40-years-experience are featured in the new MOTIF XF series that is now available in a very stylish - ULTIMATE PIANO COLLECTION white finish. - VINTAGE SYNTHESIZER COLLECTION YAMAHASYNTHSEU YAMAHA.SYNTHESIZERS.EU YAMAHASYNTHESIZEREU EUROPE.YAMAHA.COM MUSIC PRODUCTION GUIDE 04|2014 40TH ANNIVERSARY YAMAHA SYNTHESIZERS In 1974 Yamaha produced its first portable Yamaha synthesizers and workstations were and still are analog synthesizer with the SY-1. The the first choice for professionals and amateurs in the multi- faceted music business. -

User's Manual
USER’S MANUAL G-Force GUITAR EFFECTS PROCESSOR IMPORTANT SAFETY INSTRUCTIONS The lightning flash with an arrowhead symbol The exclamation point within an equilateral triangle within an equilateral triangle, is intended to alert is intended to alert the user to the presence of the user to the presence of uninsulated "dan- important operating and maintenance (servicing) gerous voltage" within the product's enclosure that may instructions in the literature accompanying the product. be of sufficient magnitude to constitute a risk of electric shock to persons. 1 Read these instructions. Warning! 2 Keep these instructions. • To reduce the risk of fire or electrical shock, do not 3 Heed all warnings. expose this equipment to dripping or splashing and 4 Follow all instructions. ensure that no objects filled with liquids, such as vases, 5 Do not use this apparatus near water. are placed on the equipment. 6 Clean only with dry cloth. • This apparatus must be earthed. 7 Do not block any ventilation openings. Install in • Use a three wire grounding type line cord like the one accordance with the manufacturer's instructions. supplied with the product. 8 Do not install near any heat sources such • Be advised that different operating voltages require the as radiators, heat registers, stoves, or other use of different types of line cord and attachment plugs. apparatus (including amplifiers) that produce heat. • Check the voltage in your area and use the 9 Do not defeat the safety purpose of the polarized correct type. See table below: or grounding-type plug. A polarized plug has two blades with one wider than the other. -
Dnafx Git Multi Effects Unit User Manual
DNAfx GiT multi effects unit user manual Musikhaus Thomann Thomann GmbH Hans-Thomann-Straße 1 96138 Burgebrach Germany Telephone: +49 (0) 9546 9223-0 E-mail: [email protected] Internet: www.thomann.de 27.11.2019, ID: 478040 Table of contents Table of contents 1 General information................................................................................................................................. 5 1.1 Further information........................................................................................................................... 6 1.2 Notational conventions.................................................................................................................... 7 1.3 Symbols and signal words............................................................................................................... 8 2 Safety instructions.................................................................................................................................. 10 3 Features....................................................................................................................................................... 14 4 Installation.................................................................................................................................................. 15 5 Connections and operating elements........................................................................................... 25 6 Operating................................................................................................................................................... -

Computer Mediated Music Production: a Study of Abstraction and Activity
Computer mediated music production: A study of abstraction and activity by Matthew Duignan A thesis for the degree of Doctor of Philosophy in Computer Science. Victoria University of Wellington 2008 Abstract Human Computer Interaction research has a unique challenge in under- standing the activity systems of creative professionals, and designing the user-interfaces to support their work. In these activities, the user is involved in the process of building and editing complex digital artefacts through a process of continued refinement, as is seen in computer aided architecture, design, animation, movie-making, 3D modelling, interactive media (such as shockwave-flash), as well as audio and music production. This thesis exam- ines the ways in which abstraction mechanisms present in music production systems interplay with producers’ activity through a collective case study of seventeen professional producers. From the basis of detailed observations and interviews we examine common abstractions provided by the ubiqui- tous multitrack-mixing metaphor and present design implications for future systems. ii Acknowledgements I would like to thank my supervisors Robert Biddle and James Noble for their endless hours of guidance and feedback during this process, and most of all for allowing me to choose such a fun project. Michael Norris and Lissa Meridan from the Victoria University music department were also invaluable for their comments and expertise. I would also like to thank Alan Blackwell for taking the time to discuss my work and provide valuable advice. I am indebted to all of my participants for the great deal of time they selflessly offered, and the deep insights they shared into their professional world. -
Vi Processor™ Card
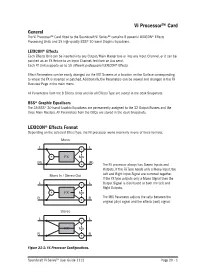
Vi Processor™ Card General The Vi Processor™ Card fitted to the Soundcraft Vi Series™ contains 8 powerful LEXICON® Effects Processing Units and 35 high-quality BSS® 30-band Graphic Equalisers. LEXICON® Effects Each Effects Unit can be inserted into any Output/Main Master bus or into any Input Channel, or it can be patched as an FX Return to an Input Channel, fed from an Aux send. Each FX Unit supports up to 30 different professional LEXICON® Effects. Effect Parameters can be easily changed via the VST Screens at a location on the Surface corresponding to where the FX is inserted or patched. Additionally, the Parameters can be viewed and changed in the FX Overview Page in the main menu. All Parameters from the 8 Effects Units and for all Effects Type are stored in the desk Snapshots. BSS® Graphic Equalisers The 35 BSS® 30-band Graphic Equalizers are permanently assigned to the 32 Output Busses and the three Main Masters. All Parameters from the GEQs are stored in the desk Snapshots. LEXICON® Effects Format Depending on the selected Effect Type, the FX processor works internally in one of three formats: The FX processor always has Stereo Inputs and Outputs. If the FX Type needs only a Mono Input, the Left and Right Input Signal are summed together. If the FX Type outputs only a Mono Signal then the Output Signal is distributed to both the Left and Right Outputs. The MIX Parameter adjusts the ratio between the original (dry) signal and the effects (wet) signal. Figure 21-1: FX Processor Configurations. -

A Users Guide to the Roland SE-02.Pages
3 OSCILLATOR ANALOG MONOPHONIC SYNTHESIZER SE-02 A USER’S GUIDE TO THE ROLAND/STUDIO ELECTRONICS SE-02 1 2 ACKNOWLEDGEMENTS: This manual was assembled, illustrated, and written by Sunshine Jones. All of the contents is taken from either his personal experience, existing documentation, and techniques submitted and found in the public domain. The document is intended as a companion guide for the Roland/Studio Electronics SE-02 Synthesizer Module. It is in no way offered as a criticism, or intended to be an authoritative guide to replace the official documentation which accompanies the commercial purchase of Roland Boutique, or Roland AIRA musical instruments. Rather, this manual is intended to support the musician, the user of these and other synthesizer modules and inspire them to create music, share sounds, and fully realize the synthesizers in front of them. In the tradition of owner’s manuals, rarely are they opened until problems arise. We tell you over and over again to RTFM, but do you listen? No, no you don’t. Manuals should be both tools for reference and instruction, as well as inspirational guides to possibility. An owner’s manual should be equally a pre purchase discovery, meant to inspire the curious with capability and possibility, and a post purchase celebration of depth, technique, guidance, and surprises. But this is by no means the last word. So many people have read and re read a manual only to still have no idea what the manual was attempting to suggest. This owner’s manual is offered free of charge to anyone curious, or frustrated by the tiny little leaflet which covers the operations of the SE-02 in several languages, as a legible alternative to the official documentation. -

SRX PIANO II Software Synthesizer Owner's Manual
SRX PIANO II Software Synthesizer Owner’s Manual © 2020 Roland Corporation 01 Introduction For details on the settings for the DAW software that you’re using, refer to the DAW’s help or manuals. About Trademarks • VST is a trademark and software of Steinberg Media Technologies GmbH. • Roland is a registered trademark or trademark of Roland Corporation in the United States and/or other countries. • Company names and product names appearing in this document are registered trademarks or trademarks of their respective owners. 2 Contents Introduction . 2 EFFECTS Parameters . 34 Applying Effects . 34 Screen Structure . 4 Effect Settings . 34 Using SRX PIANO II . 5 Signal Flow and Parameters (ROUTING). 34 How to Edit Values . 5 Multi-Effect Settings (MFX) . 35 Initializing a value. 5 Chorus and Reverb Settings. 36 About the KEYBOARD button. 5 Effects List . 37 Overview of the SRX PIANO II . 6 Multi-Effects Parameters (MFX) . 37 How the SRX PIANO II is Organized. 6 About RATE and DELAY TIME . 38 How a Patch is Structured . 6 When Using 3D Effects . 38 How a Rhythm Set is Structured . 6 About the STEP RESET function . 38 Calculating the Number of Voices Being Used . 6 Chorus Parameters . 69 About the Effects . 7 Reverb Parameters . 69 Memory and Bank . 8 What is a Memory?. 8 Bank . 8 Changing to Other Bank. 8 Exporting the Bank . 8 Importing a Bank . 8 Creating/Deleting a Bank . 8 Renaming a Bank . 8 Category. 9 Memory . 9 Loading a Memory. 9 Saving the Memory . 9 Renaming the Memory. 9 Changing the Order of the Memories . -

Dnafx Git Multi Effects Unit User Manual
DNAfx GiT multi effects unit user manual Musikhaus Thomann Thomann GmbH Hans-Thomann-Straße 1 96138 Burgebrach Germany Telephone: +49 (0) 9546 9223-0 E-mail: [email protected] Internet: www.thomann.de 10.06.2021, ID: 478040 Table of contents Table of contents 1 General information................................................................................................................................. 5 1.1 Further information........................................................................................................................... 6 1.2 Notational conventions.................................................................................................................... 7 1.3 Symbols and signal words............................................................................................................... 8 2 Safety instructions.................................................................................................................................. 10 3 Features....................................................................................................................................................... 12 4 Installation.................................................................................................................................................. 13 5 Connections and operating elements........................................................................................... 23 6 Operating................................................................................................................................................... -

SH-01A Manual.Pages
MONOPHONIC / POLYPHONIC / CHORD MACHINE SYNTHESIZER ローランド SH-01Aのユーザーガイド A USER’S GUIDE TO THE ROLAND SH-01A !1 !2 ACKNOWLEDGEMENTS: This manual was assembled, illustrated, and written by Sunshine Jones. All of the content is taken from either his personal experience, existing documentation, and techniques submitted and found in the public domain. The document is intended as a companion guide for the Roland SH-01A Synthesizer Module. It is in no way offered as a criticism, or intended to be an authoritative guide to replace the official documentation which accompanies the commercial purchase of Roland Boutique, or Roland AIRA musical instruments. Rather, this manual is intended to support the musician, the user of these and other synthesizer modules and inspire them to create music, share sounds, and fully realize the synthesizers in front of them. In the tradition of owner’s manuals, rarely are they opened until problems arise. We tell you over and over again to RTFM, but do you listen? No, no you don’t. Manuals should be both tools for reference and instruction, as well as inspirational guides to possibility. An owner’s manual should be equally a pre purchase discovery, meant to inspire the curious with capability and possibility, and a post purchase celebration of depth, technique, guidance, and surprises. But this is by no means the last word. So many people have read and re read a manual only to still have no idea what the manual was attempting to suggest. This owner’s manual is offered free of charge to anyone curious, or frustrated by the tiny little leaflet which covers the operations of the SH-01A in several languages, as a legible alternative to the official documentation.