Best Practice Guide - Generic X86 Vegard Eide, NTNU Nikos Anastopoulos, GRNET Henrik Nagel, NTNU 02-05-2013
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

(LINUX) Computer in Three Parts
Science on a (LINUX) computer in three parts Introductory short couse, Part II Thorsten Becker University of Southern California, Los Angeles September 2007 The first part dealt with ● UNIX: what and why ● File system, Window managers ● Shell environment ● Editing files ● Command line tools ● Scripts and GUIs ● Virtualization Contents part II ● Typesetting ● Programming – common languages – philosophy – compiling, debugging, make, version control – C and F77 interfacing – libraries and packages ● Number crunching ● Visualization tools Programming: Traditional languages in the natural sciences ● Fortran: higher level, good for math – F77: legacy, don't use (but know how to read) – F90/F95: nice vector features, finally implements C capabilities (structures, memory allocation) ● C: low level (e.g. pointers), better structured – very close to UNIX philosophy – structures offer nice way of modular programming, see Wikipedia on C ● I recommend F95, and use C happily myself Programming: Some Languages that haven't completely made it to scientific computing ● C++: object oriented programming model – reusable objects with methods and such – can be partly realized by modular programming in C ● Java: what's good for commercial projects (or smart, or elegant) doesn't have to be good for scientific computing ● Concern about portability as well as general access Programming: Compromises ● Python – Object oriented – Interpreted – Interfaces easily with F90/C – Numerous scientific packages Programming: Other interpreted, high- abstraction languages -

Some Notes on BLAS, SIMD, MIC and GPGPU (For Octave and Matlab)
Some Notes on BLAS, SIMD, MIC and GPGPU (for Octave and Matlab) Christian Himpe ([email protected]) WWU Münster Institute for Computational and Applied Mathematics Software-Tools für die Numerische Mathematik 15.10.2014 About1 BLAS & LAPACK Affinity SIMD Automatic Offloading 1 Get your Buzzword-Bingo ready! BLAS & LAPACK BLAS (Basic Linear Algebra System) Level 1: vector-vector operations (dot-product, vector norms, generalized vector addition) Level 2: matrix-vector operations (generalized matrix-vector multiplication) Level 3: matrix-matrix operations (generalized matrix-matrix multiplication) LAPACK (Linear Algebra Package) Matrix Factorizations: LU, QR, Cholesky, Schur Least-Squares: LLS, LSE, GLM Eigenproblems: SEP, NEP, SVD Default (un-optimized) netlib reference implementation. Used by Octave, Matlab, SciPy/NumPy (Python), Julia, R. MKL Intel’s implementation of BLAS and LAPACK. MKL (Math Kernel Library) can offload computations to XeonPhi can use OpenMP provides additionally FFT, libm and 1D-interpolation Current Version: 11.0.5 (automatic offloading to Phis) Costs (we have it, and Matlab ships with it, too) Go to: https://software.intel.com/en-us/intel-mkl ACML AMD doesn’t want to be left out. ACML (AMD Core Math Libraries) Can use OpenCL for automatic offloading to GPUs Special version to exploit FMA(4) instructions Choice of compiled binaries (GFortran, Intel Fortran, Open64, PGI) Current Version: 6 (automatic offloading to GPUs) Free (but not open source) Go to: http://developer.amd.com/tools-and-sdks/ cpu-development/amd-core-math-library-acml OpenBLAS Open Source, the third kind. OpenBLAS Fork of GotoBLAS Good performance for dense operations (close to the MKL) Can use OpenMP and is compiled for specific architecture Current Version: 0.2.11 Open source (!) Go to: http://github.com/xianyi/OpenBLAS FlexiBLAS So many BLAS implementations, so little time.. -

Xcode Package from App Store
KH Computational Physics- 2016 Introduction Setting up your computing environment Installation • MAC or Linux are the preferred operating system in this course on scientific computing. • Windows can be used, but the most important programs must be installed – python : There is a nice package ”Enthought Python Distribution” http://www.enthought.com/products/edudownload.php – C++ and Fortran compiler – BLAS&LAPACK for linear algebra – plotting program such as gnuplot Kristjan Haule, 2016 –1– KH Computational Physics- 2016 Introduction Software for this course: Essentials: • Python, and its packages in particular numpy, scipy, matplotlib • C++ compiler such as gcc • Text editor for coding (for example Emacs, Aquamacs, Enthought’s IDLE) • make to execute makefiles Highly Recommended: • Fortran compiler, such as gfortran or intel fortran • BLAS& LAPACK library for linear algebra (most likely provided by vendor) • open mp enabled fortran and C++ compiler Useful: • gnuplot for fast plotting. • gsl (Gnu scientific library) for implementation of various scientific algorithms. Kristjan Haule, 2016 –2– KH Computational Physics- 2016 Introduction Installation on MAC • Install Xcode package from App Store. • Install ‘‘Command Line Tools’’ from Apple’s software site. For Mavericks and lafter, open Xcode program, and choose from the menu Xcode -> Open Developer Tool -> More Developer Tools... You will be linked to the Apple page that allows you to access downloads for Xcode. You wil have to register as a developer (free). Search for the Xcode Command Line Tools in the search box in the upper left. Download and install the correct version of the Command Line Tools, for example for OS ”El Capitan” and Xcode 7.2, Kristjan Haule, 2016 –3– KH Computational Physics- 2016 Introduction you need Command Line Tools OS X 10.11 for Xcode 7.2 Apple’s Xcode contains many libraries and compilers for Mac systems. -
Developer Guide
Red Hat Enterprise Linux 6 Developer Guide An introduction to application development tools in Red Hat Enterprise Linux 6 Last Updated: 2017-10-20 Red Hat Enterprise Linux 6 Developer Guide An introduction to application development tools in Red Hat Enterprise Linux 6 Robert Krátký Red Hat Customer Content Services [email protected] Don Domingo Red Hat Customer Content Services Jacquelynn East Red Hat Customer Content Services Legal Notice Copyright © 2016 Red Hat, Inc. and others. This document is licensed by Red Hat under the Creative Commons Attribution-ShareAlike 3.0 Unported License. If you distribute this document, or a modified version of it, you must provide attribution to Red Hat, Inc. and provide a link to the original. If the document is modified, all Red Hat trademarks must be removed. Red Hat, as the licensor of this document, waives the right to enforce, and agrees not to assert, Section 4d of CC-BY-SA to the fullest extent permitted by applicable law. Red Hat, Red Hat Enterprise Linux, the Shadowman logo, JBoss, OpenShift, Fedora, the Infinity logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries. Linux ® is the registered trademark of Linus Torvalds in the United States and other countries. Java ® is a registered trademark of Oracle and/or its affiliates. XFS ® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries. MySQL ® is a registered trademark of MySQL AB in the United States, the European Union and other countries. Node.js ® is an official trademark of Joyent. -

GNU Scientific Library – Reference Manual
GNU Scientific Library – Reference Manual: Top http://www.gnu.org/software/gsl/manual/html_node/ GNU Scientific Library – Reference Manual Next: Introduction, Previous: (dir), Up: (dir) [Index] GSL This file documents the GNU Scientific Library (GSL), a collection of numerical routines for scientific computing. It corresponds to release 1.16+ of the library. Please report any errors in this manual to [email protected]. More information about GSL can be found at the project homepage, http://www.gnu.org/software/gsl/. Printed copies of this manual can be purchased from Network Theory Ltd at http://www.network-theory.co.uk /gsl/manual/. The money raised from sales of the manual helps support the development of GSL. A Japanese translation of this manual is available from the GSL project homepage thanks to Daisuke Tominaga. Copyright © 1996, 1997, 1998, 1999, 2000, 2001, 2002, 2003, 2004, 2005, 2006, 2007, 2008, 2009, 2010, 2011, 2012, 2013 The GSL Team. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with no Invariant Sections and no cover texts. A copy of the license is included in the section entitled “GNU Free Documentation License”. • Introduction: • Using the library: • Error Handling: • Mathematical Functions: • Complex Numbers: • Polynomials: • Special Functions: • Vectors and Matrices: • Permutations: • Combinations: • Multisets: • Sorting: • BLAS Support: • Linear Algebra: • Eigensystems: -

Parallel Programming Models for Dense Linear Algebra on Heterogeneous Systems
DOI: 10.14529/jsfi150405 Parallel Programming Models for Dense Linear Algebra on Heterogeneous Systems M. Abalenkovs1, A. Abdelfattah2, J. Dongarra 1,2,3, M. Gates2, A. Haidar2, J. Kurzak2, P. Luszczek2, S. Tomov2, I. Yamazaki2, A. YarKhan2 c The Authors 2015. This paper is published with open access at SuperFri.org We present a review of the current best practices in parallel programming models for dense linear algebra (DLA) on heterogeneous architectures. We consider multicore CPUs, stand alone manycore coprocessors, GPUs, and combinations of these. Of interest is the evolution of the programming models for DLA libraries – in particular, the evolution from the popular LAPACK and ScaLAPACK libraries to their modernized counterparts PLASMA (for multicore CPUs) and MAGMA (for heterogeneous architectures), as well as other programming models and libraries. Besides providing insights into the programming techniques of the libraries considered, we outline our view of the current strengths and weaknesses of their programming models – especially in regards to hardware trends and ease of programming high-performance numerical software that current applications need – in order to motivate work and future directions for the next generation of parallel programming models for high-performance linear algebra libraries on heterogeneous systems. Keywords: Programming models, runtime, HPC, GPU, multicore, dense linear algebra. Introduction Parallelism in today’s computer architectures is pervasive – not only in systems from large supercomputers to laptops, but also in small portable devices like smart phones and watches. Along with parallelism, the level of heterogeneity in modern computing systems is also gradually increasing. Multicore CPUs are often combined with discrete high-performance accelerators like graphics processing units (GPUs) and coprocessors like Intel’s Xeon Phi, but are also included as integrated parts with system-on-chip (SoC) platforms, as in the AMD Fusion family of ap- plication processing units (APUs) or the NVIDIA Tegra mobile family of devices. -

AMD Core Math Library (ACML)
AMD Core Math Library (ACML) Version 4.2.0 Copyright c 2003-2008 Advanced Micro Devices, Inc., Numerical Algorithms Group Ltd. AMD, the AMD Arrow logo, AMD Opteron, AMD Athlon and combinations thereof are trademarks of Advanced Micro Devices, Inc. i Short Contents 1 Introduction................................... 1 2 General Information ............................. 2 3 BLAS: Basic Linear Algebra Subprograms ............. 19 4 LAPACK: Package of Linear Algebra Subroutines ........ 20 5 Fast Fourier Transforms (FFTs) .................... 24 6 Random Number Generators....................... 75 7 ACML MV: Fast Math and Fast Vector Math Library .... 163 8 References .................................. 229 Subject Index ................................... 230 Routine Index ................................... 233 ii Table of Contents 1 Introduction ............................... 1 2 General Information ....................... 2 2.1 Determining the best ACML version for your system ........... 2 2.2 Accessing the Library (Linux) ................................ 4 2.2.1 Accessing the Library under Linux using GNU gfortran/gcc ......................................................... 4 2.2.2 Accessing the Library under Linux using PGI compilers pgf77/pgf90/pgcc ......................................... 5 2.2.3 Accessing the Library under Linux using PathScale compilers pathf90/pathcc ........................................... 6 2.2.4 Accessing the Library under Linux using the NAGWare f95 compiler................................................. -

Analysing CMS Software Performance Using Igprof, Oprofile and Callgrind
Analysing CMS software performance using IgProf, OPro¯le and callgrind L Tuura1, V Innocente2, G Eulisse1 1 Northeastern University, Boston, MA, USA 2 CERN, Geneva, Switzerland Abstract. The CMS experiment at LHC has a very large body of software of its own and uses extensively software from outside the experiment. Understanding the performance of such a complex system is a very challenging task, not the least because there are extremely few developer tools capable of pro¯ling software systems of this scale, or producing useful reports. CMS has mainly used IgProf, valgrind, callgrind and OPro¯le for analysing the performance and memory usage patterns of our software. We describe the challenges, at times rather extreme ones, faced as we've analysed the performance of our software and how we've developed an understanding of the performance features. We outline the key lessons learnt so far and the actions taken to make improvements. We describe why an in-house general pro¯ler tool still ends up besting a number of renowned open-source tools, and the improvements we've made to it in the recent year. 1. The performance optimisation issue The Compact Muon Solenoid (CMS) experiment on the Large Hadron Collider at CERN [1] is expected to start running within a year. The computing requirements for the experiment are immense. For the ¯rst year of operation, 2008, we budget 32.5M SI2k (SPECint 2000) computing capacity. This corresponds to some 2650 servers if translated into the most capable computers currently available to us.1 It is critical CMS on the one hand acquires the resources needed for the planned physics analyses, and on the other hand optimises the software to complete the task with the resources available. -

Quantian: a Scientific Computing Environment
New URL: http://www.R-project.org/conferences/DSC-2003/ Proceedings of the 3rd International Workshop on Distributed Statistical Computing (DSC 2003) March 20–22, Vienna, Austria ISSN 1609-395X Kurt Hornik, Friedrich Leisch & Achim Zeileis (eds.) http://www.ci.tuwien.ac.at/Conferences/DSC-2003/ Quantian: A Scientific Computing Environment Dirk Eddelbuettel [email protected] Abstract This paper introduces Quantian, a scientific computing environment. Quan- tian is directly bootable from cdrom, self-configuring without user interven- tion, and comprises hundreds of applications, including a significant number of programs that are of immediate interest to quantitative researchers. Quantian is available at http://dirk.eddelbuettel.com/quantian.html. 1 Introduction Quantian is a directly bootable and self-configuring Linux system on a single cdrom. Quantian is an extension of Knoppix (Knopper, 2003) from which it takes its base system of about 2.0 gigabytes of software, along with automatic hardware detec- tion and configuration. Quantian adds software with a quantitative, numerical or scientific focus such as R, Octave, Ginac, GSL, Maxima, OpenDX, Pari, PSPP, QuantLib, XLisp-Stat and Yorick. This paper is organized as follows. In the next section, we introduce the Debian distribution upon which Knopppix and, thus, Quantian are built, discuss Debian packages and its packaging system and provide an overview of the support for R and its related programs. We also describe the Knoppix system and provide a basic outline of Quantian. In the ensuing section, we describe the Quantian build process. Possible extensions are discussed in the following section before a short summary concludes the paper. 2 Background Quantian builds on Knoppix, which is itself based on Debian. -
Capítulo 1 El Lenguaje De Programación Objectivec
www.gnustep.wordpress.com Introducción al entorno de desarrollo GNUstep 1 www.gnustep.wordpress.com Introducción al entorno de desarrollo GNUstep Licencia de este documento Copyright (C) 2008, 2009 German A. Arias. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free Documentation License". 2 www.gnustep.wordpress.com Introducción al entorno de desarrollo GNUstep Tabla de Contenidos INTRODUCCIÓN.....................................................................................................................................6 Capítulo 0...................................................................................................................................................7 Instalación de GNUstep y las especificaciones OpenStep.........................................................................7 0.1 Instalando GNUstep........................................................................................................................8 0.2 Especificaciones OpenStep...........................................................................................................12 0.3 Estableciendo las teclas modificadoras.........................................................................................13 Capítulo 1.................................................................................................................................................16 -

35.232-2016.43 Lamees Elhiny.Pdf
LOAD PARTITIONING FOR MATRIX-MATRIX MULTIPLICATION ON A CLUSTER OF CPU-GPU NODES USING THE DIVISIBLE LOAD PARADIGM by Lamees Elhiny A Thesis Presented to the Faculty of the American University of Sharjah College of Engineering in Partial Fulfillment of the Requirements for the Degree of Master of Science in Computer Engineering Sharjah, United Arab Emirates November 2016 c 2016. Lamees Elhiny. All rights reserved. Approval Signatures We, the undersigned, approve the Master’s Thesis of Lamees Elhiny Thesis Title: Load Partitioning for Matrix-Matrix Multiplication on a Cluster of CPU- GPU Nodes Using the Divisible Load Paradigm Signature Date of Signature (dd/mm/yyyy) ___________________________ _______________ Dr. Gerassimos Barlas Professor, Department of Computer Science and Engineering Thesis Advisor ___________________________ _______________ Dr. Khaled El-Fakih Associate Professor, Department of Computer Science and Engineering Thesis Committee Member ___________________________ _______________ Dr. Naoufel Werghi Associate Professor, Electrical and Computer Engineering Department Khalifa University of Science, Technology & Research (KUSTAR) Thesis Committee Member ___________________________ _______________ Dr. Fadi Aloul Head, Department of Computer Science and Engineering ___________________________ _______________ Dr. Mohamed El-Tarhuni Associate Dean, College of Engineering ___________________________ _______________ Dr. Richard Schoephoerster Dean, College of Engineering ___________________________ _______________ Dr. Khaled Assaleh Interim Vice Provost for Research and Graduate Studies Acknowledgements I would like to express my sincere gratitude to my thesis advisor, Dr. Gerassi- mos Barlas, for his guidance at every step throughout the thesis. I am thankful to Dr. Assim Sagahyroon, and to the Department of Computer Science & Engineering as well as the American University of Sharjah for offering me the Graduate Teaching Assistantship, which allowed me to pursue my graduate studies. -
Sun Microsystems: Sun Java Workstation W1100z
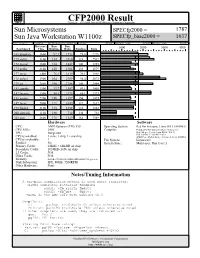
CFP2000 Result spec Copyright 1999-2004, Standard Performance Evaluation Corporation Sun Microsystems SPECfp2000 = 1787 Sun Java Workstation W1100z SPECfp_base2000 = 1637 SPEC license #: 6 Tested by: Sun Microsystems, Santa Clara Test date: Jul-2004 Hardware Avail: Jul-2004 Software Avail: Jul-2004 Reference Base Base Benchmark Time Runtime Ratio Runtime Ratio 1000 2000 3000 4000 168.wupwise 1600 92.3 1733 71.8 2229 171.swim 3100 134 2310 123 2519 172.mgrid 1800 124 1447 103 1755 173.applu 2100 150 1402 133 1579 177.mesa 1400 76.1 1839 70.1 1998 178.galgel 2900 104 2789 94.4 3073 179.art 2600 146 1786 106 2464 183.equake 1300 93.7 1387 89.1 1460 187.facerec 1900 80.1 2373 80.1 2373 188.ammp 2200 158 1397 154 1425 189.lucas 2000 121 1649 122 1637 191.fma3d 2100 135 1552 135 1552 200.sixtrack 1100 148 742 148 742 301.apsi 2600 170 1529 168 1549 Hardware Software CPU: AMD Opteron (TM) 150 Operating System: Red Hat Enterprise Linux WS 3 (AMD64) CPU MHz: 2400 Compiler: PathScale EKO Compiler Suite, Release 1.1 FPU: Integrated Red Hat gcc 3.5 ssa (from RHEL WS 3) PGI Fortran 5.2 (build 5.2-0E) CPU(s) enabled: 1 core, 1 chip, 1 core/chip AMD Core Math Library (Version 2.0) for AMD64 CPU(s) orderable: 1 File System: Linux/ext3 Parallel: No System State: Multi-user, Run level 3 Primary Cache: 64KBI + 64KBD on chip Secondary Cache: 1024KB (I+D) on chip L3 Cache: N/A Other Cache: N/A Memory: 4x1GB, PC3200 CL3 DDR SDRAM ECC Registered Disk Subsystem: IDE, 80GB, 7200RPM Other Hardware: None Notes/Tuning Information A two-pass compilation method is